 通過單片機結合光電式傳感器技術緩實現降器的設計
通過單片機結合光電式傳感器技術緩實現降器的設計
1.引言
現代生活使人們的生活高層化,高層建筑為人們提供方便快捷的同時也給人們的安全帶來隱患.緩降器可以將處于高層建筑物上的受困人員快速解救下來.但是,現有技術中的緩降器,有的結構比較復雜,使用中需要電源.
當事故發生時,高層建筑通常都會斷電,使用電源的緩降器無法運行;結構復雜的緩降器,長期放置,非常容易出現故障.還有的緩降器使用操作復雜,對于非專業人員,往往不便使用.發生險情時,尤其是老人或小孩,容易驚慌,復雜的操作會減慢脫險速度,如果操作失誤,反而會發生新的險情.
2.系統主要硬件
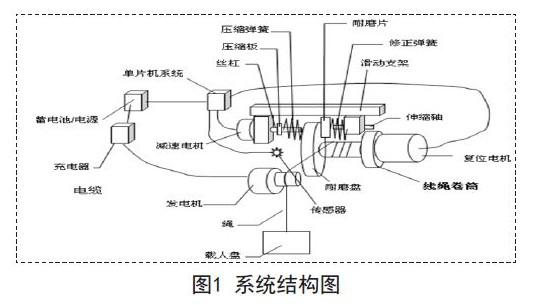
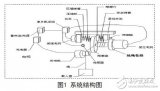
本文設計的緩降器,系統結構簡單,安裝方便,防止斷電造成意外,裝置具備自身發電.儲能作為能源,做到了真正意義低碳,并能夠適應出險時順利脫險.它包括:一個帶滑動支架的框架機構,一個線繩卷筒.一臺發電機.一臺減速電機.一臺復位電動機.一個線繩卷筒減速機構.一個載人裝置和一個控制裝置.如圖1所示.他們之間通過一條柔軟的鋼絲繩連接,為了增加鋼絲繩與發電機的摩擦力,可以將鋼絲繩在發電機的轉動軸上多繞幾周.當有重物(或者是人)放(站)在載物盤(人)上,載物盤受到重力加速度的作用,越來越快的下降,發電機轉動軸也隨之轉動并產生更多的電能;電能經過充電器給蓄電池充電;蓄電池經過電源管理模塊再為控制器.傳感器.減速電機.復位電機等設備提供電源.由于重力加速度產生的電能很大(實驗數據見表1說明).根據能量守恒公式得出重物做功為W1=F*s=G*h,得到的電能為W2=U*I*t;相對來說機械效率為η=W2/W1*100%;η越大說明自己供電的風險越高,反之,自己供電安全系數越大,η很小.而控制器.傳感器使用低功耗元件,電流都是毫安級,幾乎可以忽略.減速電機只有下降速度超限時才發揮作用,所以說用電時間.用電量都可以滿足要求.
3.系統控制原理
3.1 控制原理
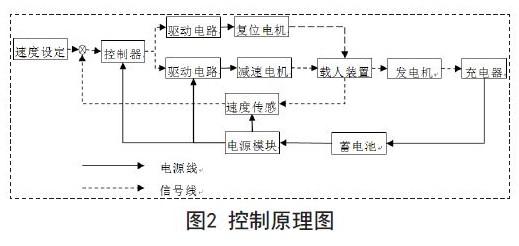
控制原理如圖2所示,當有重物(或者是人)放(站)在載物盤(人)上,載物盤受到重力加速度作用,越來越快的下降,發電機轉動軸也隨之轉動并產生電能;電能通過充電器給蓄電池充電;蓄電池經過電源管理模塊再為控制器.傳感器.減速電機復位電機提供電源.當載物盤下降速度超過設定上限時,發電機上的轉動軸也快速旋轉,轉動軸外有一圈均勻的分割的小葉片,在小葉片的外側裝有對射的光電式傳感器,轉動軸旋轉越快,對射式的光電傳感器被遮擋的頻率越高,產生的脈沖越多;因此測出載物盤與脈沖成正比,可以根據測得脈沖數控制減速電機的正反.快慢.減速電機的正反.快慢又影響到絲杠.摩擦片與摩擦盤之間的位置關系,從而可以控制緩降器的下降速度.因為發生危險時,緩降器將發生多次作用,當緩降器下到最低部,就要考慮載物盤的復位問題,如何識別緩降器已經到底部,緩降器載物盤上沒有人了,當緩降器到底部時,發電機的轉動軸不再轉動,此時增設幾秒鐘的延時,作為下來時間就可以了.復位電機是空載,轉速可以恒速控制,而且要快.以避免緩降器在非正式使用時,載人裝置不會意外降下.該限位卡具有一定的強度,當意外地有小孩拉動或坐上載人裝置時,該限位卡可以卡住載人裝置不使其下降.當要使用時,載人裝置上乘坐人的重量超過限位卡的極限強度,被拉斷,則載人裝置即可下降.
3.2 單片機的選用
單片機模塊在控制系統處于核心的位置,從硬件設計的角度來說,首先要保證其供電穩定,其次要對其部分功能模塊如PWM通道,定時器通道的進行編程,寫入驅動程序,使其工作.MC9S12系列單片機是以速度更快的CPU12內核為核心的單片機系列,總線速度為8MHZ,MC9S12 DG128開發板實際上是單片機構成的最小系統.板上有構成最小系統需要的復位電路.晶體振蕩器及時鐘電路,驅動電路,+5V電源插座.單片機的所有I/O端口都通過2個64芯的歐式插頭引出.由于直流電機的轉速和緩 降器的下降時刻變化.存在傳感器測量滯后.灰分測量值存在檢測滯后等原因,在實際的起降操作不能簡單的按照傳統的PID控制,采用模糊控制效果更加理想,本文提供的單片機完全滿足緩降器控制系統的要求.
3.3 傳感器工作原理
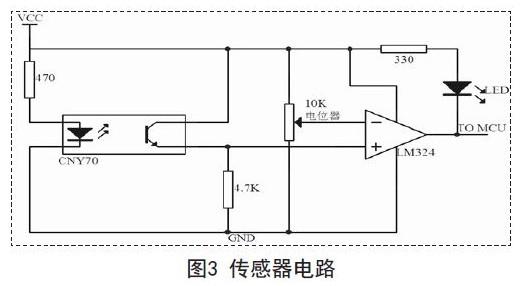
發光二極管在使用約15mA發射電流.沒有強烈外部光線干擾時,探測距離達到20mm,由于傳感器與轉輪距離很近,大約只有5mm,所以這樣的探測距離完全可以滿足需要.紅外傳感器的電路有多種形式,在這里為了安裝調試方便,我們采用了圖3的電路形式.圖3中LM324為四個運算放大器所組成的IC芯片,將LM324連接成為一個電壓比較器,其反相輸入端由電位器分壓后接入,同相輸入端接收三極管的集電極,這樣設計的電路非常的直觀,且輸出端為數字信號“0”或者“1”,可直接與單片機的I/O端口相連.
3.4 電源模塊
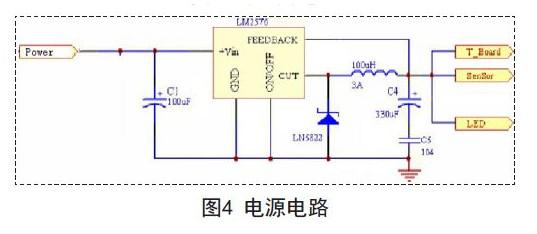
單片機.傳感器及其信號采集電路需要+5V電源,采用低壓降電源管理芯片LM2576產生,LM2576,價格低廉,電路成熟,但是考慮到驅動電機啟動瞬間會引起電壓瞬間下降的現象,所以電源管理系統中采用了低壓降的電壓調節器LM2576來產生5V電壓.如圖4所示.
4.軟件設計
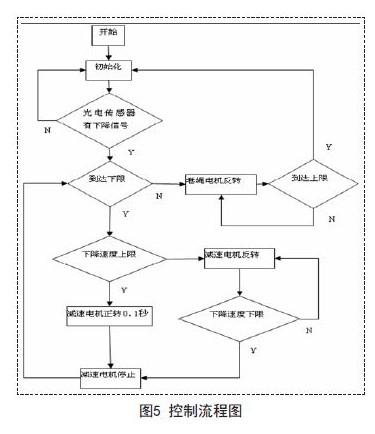
本文設計的緩降器,通過放繩索下降而驅動發電機運轉發電,再通過發出的電能驅動減速電動機帶動線繩卷筒轉動,減速機構阻止放繩索下降的速度,使得緩降器能夠基本上勻速地下降,既快捷.又安全,老人.孩子使用也很方便.軟件流程如圖5所示.
5.實驗測試
實驗實物如圖6所示.為了驗證緩降器的有效性,對實物進行安裝與調試,為了計算方便,對在重量和高度專門設計,載重量為5.0Kg.10.0Kg,高度3.0m.6.0m,測控數據為選擇關鍵的參數:發電機電壓.電流,載物盤的下降時間.發電機電壓.電流是考量其產生電量的參數,它關系到自供電的成敗.下降時間是測量下降速度的參數.需要說明的是有無控制器作用載物盤的下降速度方式是不一樣的,有控制器作用載物盤做的是勻速運動,無控制器作用載物盤做的是勻加速運動.通過表1的相關數據能說明這一點.勻速運動0.5~0.6m/s;變化幅度10~20%勻加速運動1.1~2.6m/s2,變化幅度最大150%.

表1數據除重量.高度外其它為3次的平均值.實驗環境為普通實驗室環境.

6.結束語
本文提供的緩降器具有如下優點:結構簡單.部件銜接緊湊,便于安裝;質量可靠;考慮到了能源環保.防止意外等情況的發生.為了克服這些問題在裝置設計上具有自身發電.儲能等功能,做到了真正意義低碳,并能夠適應出險時可能斷電的情況.因此,它特別適合于高層建筑,尤其高校的居住公寓.辦公樓,用于應備突發事件.通過實驗,達到了預期效果.
-
傳感器
+關注
關注
2552文章
51362瀏覽量
755696 -
單片機
+關注
關注
6042文章
44616瀏覽量
637442 -
控制器
+關注
關注
112文章
16437瀏覽量
178985
發布評論請先 登錄
相關推薦








 工商網監
工商網監
評論