 LED矩陣驅動器拓撲結構的特點及應用
LED矩陣驅動器拓撲結構的特點及應用
對顯示設計工程師來說,人眼在視覺處理上有限的分辨率和惰性是一項福祉:從大于一定的距離處觀看,LED矩陣顯示為均勻的明亮區域;只有靠近仔細查看才可以看到單獨的LED燈。時間復用也欺騙了人的眼睛,使快速變化的幀成為連續、流暢的畫面。
如今,這種眼睛/大腦行為使生產各種顯示裝置成為現實,從為移動應用帶來有趣照明效果的小型4×4 LED矩陣,到用于面板顯示的100×100 LED矩陣;以及,工業機器中的狀態信息顯示、大型高清晰度視頻墻中使用的1920×1080 LED矩陣,還有娛樂場、音樂會或體育場館屋頂上的應用等。雖然這些應用似乎完全不同,但他們有一個共同點:每一個LED需要單獨放置并根據需要點亮。
對于絕大多數面板(除了非常小的面板),這就提出了一個設計上的難題。在一個4×4的面板中,直接放置16個LED燈仍是可以實現的。然而,即使是一個中等規模的分辨率為256的點陣顯示屏,使用256個通道是行不通的。因此,我們必須尋找不同的尋址方法。
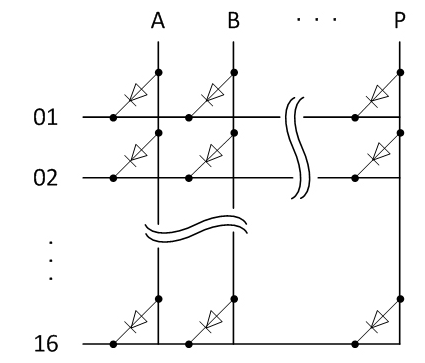
傳統的方法是通過在點陣中行和列來定義LED坐標。在一個256LED點陣的例子中,這通常被組織成16×16的標準形式(見圖1)。

圖1:由16行和16列組成的256LED點陣。
每一列(A~P)都連接了16個LED燈的陽極,每一行(1~16)連接16個LED燈的陰極。圖1可看出配置所有256個LED燈只需32個通道,遠遠少于直接部署單個LED所需的256個通道。驅動點陣所需的引腳數量n和LED數量m因此可以表達為:
 (1)
(1)
為了布置給定的LED,例如[01,A],列A需要被連接到VLED(LED電源電壓),而行01需要被連接到地(需要一個串聯電阻以限制電流)。而在LED驅動芯片的配置中,列A可能直接連到VLED,而行01連接到一個電流阱。該方法可以減去限流電阻。
在每個控制引腳上連接16個LED的缺點在于,無法同時顯示一個完整的幀(256個點)。例如,如果LED燈[01,B]和[02,A]同時點亮,LED[02,B]會自動產生壓差,與平行的其他兩個燈一起點亮,即使它被設定為熄滅狀態。為了克服該問題,可以使用時分復用。以50Hz或更高的刷 新速率,人類大腦的視覺處理功能會產生一個無閃爍的連續幀。因此我們可以讓LED矩陣段順次啟動,同時保證其他部分處于三態。段刷新率為幀刷新率乘以段數量。
這被證明是一種用于LED多路復用的完美且有效的技術,但它仍然需要一個具有高引腳數的驅動IC和大到足以容納32個通道導線的印刷電路板。在一般情況下,集成電路和印刷電路板面積越大,材料和生產成本也越高。
顯示器制造商對矩陣顯示驅動器具有較少引腳數量的需求導致“Charlieplexing”算法的實施,該方法是查理?艾倫在1995年提出的一個架構,他曾作為一名工程師在模擬IC制造商Maxim任職。該想法是連接每個LED的陰極和陽極到相同的通道(見圖2)。
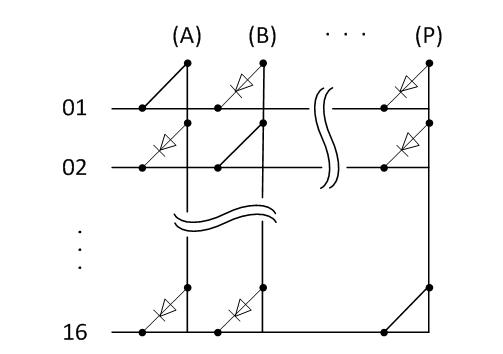
圖2:Charlieplexed算法下的16×16點陣。
圖2顯示了沒有LED被連接到空的對角線。在這些節點,每一行都和一列產生短路。LED的數量m和所需通道n之間的關系可以計算為:
 (2)
(2)
公式3顯示了n經變換后的表達形式。所需的通道數量n和所需的LED數量m之間的關系可以表達為:
 (3)
(3)
使用16個通道即可解決240個LED燈的尋址。在256-LED顯示的例子中,需要一個額外的通道(事實上17個通道就可以布置最多272個 LED)。換言之,驅動器的引腳數幾乎被減少了50%.同樣,時分復用是必需的。比如要激活LED[02,A],行01需要被連接到VLED,而行02則 需要被連接到地。所有其他的行都處于三態。
然而,減少引腳數量并不是沒有困難的。第一個問題來自charlieplexed矩陣的拓撲結構。圖3顯示寄生的平行路徑是charlieplexed矩陣的固有特征。
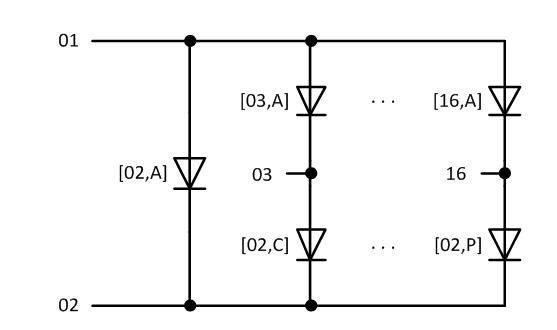
圖3:charlieplexed矩陣的平行路徑。
事實上,每一個單個LED都與多個串行雙LED燈平行。這意味著,在矩陣中的LED必須具有相似的正向電壓:如果LED [02,A]和平行路徑上的LED之間的正向電壓誤差接近兩倍,那么在平行路徑上的LED可能會被無意中點亮。
在實踐中,一個管理良好的顯示器生產過程可以確保LED匹配達到遠遠小于兩倍的正向電壓誤差。
第二個由Charlieplexing帶來的問題無法輕易避免。當LED因短路或開路發生故障時,該問題就會產生。圖4a顯示了短路的結果。讓我們假定LED[01,B]短路,LED[03,B]應該被開啟。02通道被配置為電流源,從電源為行02提供電流。通道03被配置為一個開關,連接行03至地。由于[01,B]的短路,列A和行01無意中被拉高(以紅色顯示)。因此,列A中的每個LED在陽極都存在正壓。由于行03被拉低從而點亮[03,B],行03中的每個LED在陰極都接地(以藍色顯示)。因此,由于短路的原因,LED[03,A]兩端電壓與LED[03,B]完全一樣,也同樣被點亮了。
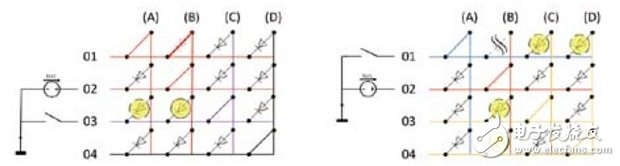
圖4:短路中的Charlieplexed點陣(4a,左)以及開路狀態(4b,右)。
一般來說,當有LED短路時,連接到下面通道上的LED會發生討厭的重影現象:
● 發生短路的通道(和相應的行)。(在該示例中,就是通道01)
● 通過短路直接連接上面通道的通道(和相應的行)。(在該示例中,就是通道02)
該問題在一個開路LED情況下顯得更加突出。在圖4b中,激活有問題的LED[01,B].通道01被配置作為開關連接行01至接地,通道03仍然保持與原先相同的狀態。因此,行02和列B被拉高(顯示為紅色),行01和列A被拉低(圖中藍色部分)。由于在配置的LED中有一個開路,行02和列B上的電壓開始上升(紅色中所示)。只要其中一個達到正向電壓,行03和列C就將通過LED[03,B]產生偏壓(黃色中所示)。所有[X,B]LED燈都會產生同樣的情況。列B中的電壓進一步上升,直到到達兩倍的LED正向電壓。現在,所有在[X,B]和[01,x]的LED完全處于偏壓并被點亮。
過去,重影現象以及開路LED帶來的潛在問題阻礙了實施charlieplexed點陣的嘗試。但現在,由Charlieplexing改進而來的crossplexing技術,將有效消除前者帶來的缺陷并提供較少的引腳數量,這是LED顯示器的設計師們一直在尋找的解決方案。
為了實施crossplexing算法,第一個要求就是系統必須知道是否存在開路或短路。為了便于說明,讓我們假設,驅動器的布置由位于陽極側的電源和陰極側的低電阻開關組成。每一行都需要一個電源和一個開關的組合。
當單個部署的LED發生短路時,電源仍將繼續提供電流。然而,從電壓角度來看,卻引起了一定的變化:電流源輸出的電壓將不會達到LED的正向電壓(因為短路的原因),而會處于接地的狀態,明確指示短路的存在。因此,將確定的電壓閾值與實際的陽極電壓進行比較就可以檢測是否存在短路。
在開路LED的例子中,陽極電壓將上升至兩倍的正向電壓--同樣地也會產生存在開路的明確指示。在這種情況下,是否達到絕對電壓水平將取決于所使用LED的正向電壓,而如今市場中的LED此參數上存在相當大的差異。所以單個電壓閾值不能概括所有的LED.
根據LED的數據手冊來分析所有可能的變化并計算開路閾值的最低值在理論上是可行的,但這個最低值可能對許多LED是無效的。事實上,這個值可以采用更明智的方法來計算。任何給定的PCB面板所具有的最優電壓閾值正是面板上所有LED的最高正向電壓。然而,確定這個最優電壓閾值,必須測量每一個PCB電路板并在組裝時完成配置,這又是不可行且昂貴的制造步驟。
目前,類似于這種方法的技術方案可以通過AS1119得以實現,該芯片是一款新的144 LED crossplexing矩陣驅動器IC.通過該芯片實現的開路/短路檢測過程與矩陣內LED的正向電壓,就可以確定并自動設置開路狀態下最優的閾值電壓。
當然,僅僅知道開路或短路的位置無法消除重影。但是,一旦檢測到開路的存在,系統就可以存儲它的坐標。驅動器每次按指令布置LED時就會“掩蓋”該位置并忽略指令。這個措施可以防止LED在剩余的點陣顯示中發生意外操作。在大型矩陣中,單個LED的關閉完全不會影響到用戶的使用感受。
對于短路,防止重影顯得更為困難。如上所示,單個LED短路會引起其他多個LED的重影效果。掩蓋所有這些發生故障的LED來避免重影并不能解決問題。與短路相關的通道都需要停用,這可能會導致矩陣中大量LED的故障。在一個四通道的矩陣中,停用通道01和通道02后,只剩下兩個可運作的LED.這將損失整個矩陣的83%.對于16×16的矩陣中,停用兩個通道后,240個LED中將只留下182個仍處于工作狀態,損失整個矩陣的24%.
每個設計師可以選擇自己認為最好的方法,矩陣越大,停用兩個通道所引起的影響就越小。是否可以接受這些影響,很大程度上取決于應用本身。對于較小的矩陣,停用兩通道可能就無法正常運作。
-
led
+關注
關注
242文章
23338瀏覽量
662241 -
驅動器
+關注
關注
53文章
8267瀏覽量
146800 -
拓撲
+關注
關注
4文章
341瀏覽量
29646
發布評論請先 登錄
相關推薦
非隔離式升壓拓撲的LED驅動器電路

三種類型拓撲結構的LED驅動器方案
低壓便攜設備的LED驅動器怎么選擇?
Diodes推出全新多拓撲LED驅動器ZXLD1374
NIKO可調光PFC LED驅動器專為LED燈泡設計解析
NIKO可調光PFC LED驅動器專為LED燈泡及燈管設計

適用于高功率LED驅動器應用的各種拓撲結構的調光比





 工商網監
工商網監
評論