 機器人控制系統的基本單元與機器人控制系統的特點分析
機器人控制系統的基本單元與機器人控制系統的特點分析
機器人控制系統概念
機器人控制系統是指由控制主體、控制客體和控制媒體組成的具有自身目標和功能的管理系統。控制系統意味著通過它可以按照所希望的方式保持和改變機器、機構或其他設備內任何感興趣或可變化的量。控制系統同時是為了使被控制對象達到預定的理想狀態而實施的。控制系統使被控制對象趨于某種需要的穩定狀態。
機器人控制系統特點
機器人的控制技術是在傳統機械系統的控制技術的基礎上發展起來的,因此兩者之間并無根本的不同。但機器人控制系統也有許多特殊之處。其特點如下:
1、機器人控制系統本質上是一個非線性系統。引起機器人非線性因素很多,機器人的結構、傳動件、驅動元件等都會引起系統的非線性。
2、機器人控制系統是由多關節組成的一個多變量控制系統,且各關節間具有耦合作用。具體表現為某一個關節的運動,會對其他關節產生動力效應,每一個關節都要受到其他關節運動所產生的擾動。因此工業機器人的控制中經常使用前饋、補償、解耦和自適應等復雜控制技術。
3、機器人系統是一個時變系統,其動力學參數隨著關節運動位置的變化而變化。
4、較高級的機器人要求對環境條件、控制指令進行測定和分析,采用計算機建立龐大的信息庫,用人工智能的方法進行控制、決策、管理和操作,按照給定的要求,自動選擇最佳控制規律。
機器人控制系統的基本要求
從使用的角度講,機器人是一種特殊的自動化設備,對其控制有如下要求:
1、多軸運動的協調控制,以產生要求的工作軌跡。因為機器人的手部的運動是所有關節運動的合成運動,要使手部按照規定的規律運動,就必須很好地控制各關節協調動作,包括運動軌跡、動作時序的協調。
2、較高的位置精度,很大的調速范圍。除直角坐標式機器人外,機器人關節上的位置檢測元件通常安裝在各自的驅動軸上,構成位置半閉環系統。此外,由于存在開式鏈傳動機構的間隙等,使得機器人總的位置精準度降低,與數控機床比,約降低一個數量級。但機器人的調速范圍很大,通常超過幾千。這是由于工作時,機器人可能以極低的作業速度加工工件;空行程時,為提高效率,又能以極高的速度移動。
3、系統的靜差率要小,即要求系統具有較好的剛性。這是因為機器人工作時要求運動平穩,不受外力干擾,若靜差率大將形成機器人的位置誤差。
4、位置無超調,動態響應快。避免與工件發生碰撞,在保證系統適當響應能力的前提下增加系統的阻尼。
5、需采用加減速控制。大多數機器人具有開鏈式結構,其機械剛度很低,過大的加減速度會影響其運動平穩性,運動啟停時應有加減速裝置。通常采用勻加減速指令來實現。
6、各關節的速度誤差系數應盡量一致。機器人手臂在空間移動,是各關節聯合運動的結果,尤其是當要求沿空間直線或圓弧運動時。即使系統有跟蹤誤差,仍應要求各軸關節伺服系統的速度放大系數盡可能一致,而且在不影響穩定性的前提下,盡量取較大的數值。
7、從操作的角度看,要求控制系統具有良好的人機界面,盡量降低對操作者的要求。因此,在大部分的情況下,要求控制器的設計人員完成底層伺服控制器設計的同時,還要完成規劃算法,而把任務的描述設計成簡單的語言格式由用戶完成。
8、從系統的成本角度看,要求盡可能地降低系統的硬件成本,更多的采用軟件伺服的方法來完善控制系統的性能。
機器人控制系統的功能要求
1、記憶功能:存儲作業順序、運動路徑、運動方式、運動速度和與生產工藝有關的信息。
2、示教功能:離線編程,在線示教,間接示教。在線示教包括示教盒和導引示教兩種。
3、與外圍設備聯系功能:輸入和輸出接口、通信接口、網絡接口、同步接口。
4、坐標設置功能:有關節、絕對、工具、用戶自定義四種坐標系。
5、人機接口:示教盒、操作面板、顯示屏。
6、傳感器接口:位置檢測、視覺、觸覺、力覺等。
7、位置伺服功能:機器人多軸聯動、運動控制、速度和加速度控制、動態補償等。
8、故障診斷安全保護功能:運行時系統狀態監視、故障狀態下的安全保護和故障自診斷。
機器人控制系統的主要種類
控制系統的任務,是根據機器人的作業指令程序、以及從傳感器反饋回來的信號,支配機器人的執行機構去完成的運動和功能。 假如機器人不具備信息反饋特征,則為開環控制系統;若具備信息反饋特征,則為閉環控制系統。
根據控制原理可分為程序控制系統、適應性控制系統和人工智能控制系統。
根據控制運動的形式可分為點位控制和軌跡控制。
機器人控制系統的基本單元
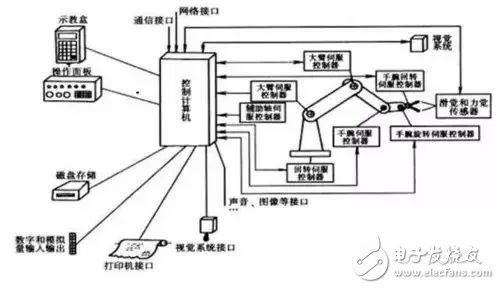
1、控制計算機:控制系統的調度指揮中心機構。
2、示教盒:示教機器人的工作軌跡和參數設定,以及所有人機交互操作,擁有自己獨立的CPU以及存儲單元,與主計算機之間以串行通信方式實現信息交互。
3、操作面板:由各種操作按鍵、狀態指示燈構成,只完成基本功能操作。
4、硬盤和軟盤存儲存:儲機器人工作程序的外圍存儲器。
5、數字和模擬量輸入輸出:各種狀態和控制命令的輸入或輸出。
6、打印機接口:記錄需要輸出的各種信息。
7、傳感器接口:用于信息的自動檢測,實現機器人柔順控制,一般為力覺、觸覺和視覺傳感器。
8、軸控制器:完成機器人各關節位置、速度和加速度控制。
9、輔助設備控制:用于和機器人配合的輔助設備控制,如手爪變位器等。
10通信接口:實現機器人和其他設備的信息交換,一般有串行接口、并行接口等。
11、網絡接口
1)Ethernet接口:可通過以太網實現數臺或單臺機器人的直接PC通信,數據傳輸速率高達10Mbit/s,可直接在PC上用windows庫函數進行應用程序編程之后,支持TCP/IP通信協議,通過Ethernet接口將數據及程序裝入各個機器人控制器中。
2)Fieldbus接口:支持多種流行的現場總線規格,如Devicenet、ABRemoteI/O、Interbus-s、profibus-DP、M-NET等。
機器人控制系統結構方式
集中控制系統
用一臺計算機實現全部控制功能,結構簡單,成本低,但實時性差,難以擴展,在早期的機器人中常采用這種結構,其構成框圖,如圖所示。
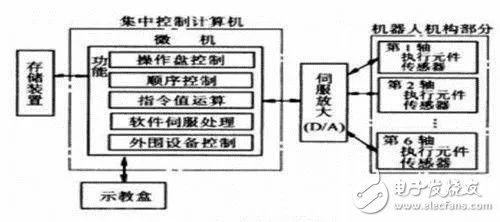
基于PC的集中控制系統里,充分利用了PC資源開放性的特點,可以實現很好的開放性:多種控制卡,傳感器設備等都可以通過標準PCI插槽或通過標準串口、并口集成到控制系統中。
集中式控制系統的優點是:硬件成本較低,便于信息的采集和分析,易于實現系統的最優控制,整體性與協調性較好,基于PC的系統硬件擴展較為方便。
其缺點也顯而易見:系統控制缺乏靈活性,控制危險容易集中,一旦出現故障,其影響面廣,后果嚴重;由于機器人的實時性要求很高,當系統進行大量數據計算,會降低系統實時性,系統對多任務的響應能力也會與系統的實時性相沖突;此外,系統連線復雜,會降低系統的可靠性。
主從控制方式
采用主、從兩級處理器實現系統的全部控制功能。主CPU實現管理、坐標變換、軌跡生成和系統自診斷等:從CPU實現所有關節的動作控制。其構成框圖,如圖所示。
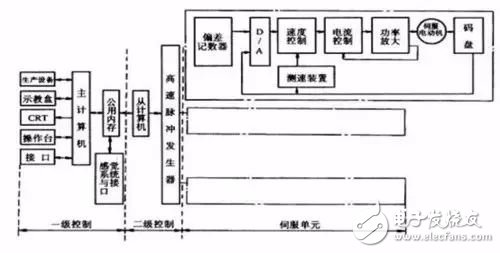
主從控制方式系統實時性較好,適于高精度、高速度控制,但其系統擴展性較差,維修困難。
分散控制方式
按系統的性質和方式將系統控制分成幾個模塊,每一個模塊各有不同的控制任務和控制策略,各模式之間可以是主從關系,也可以是平等關系。這種方式實時性好,易于實現高速、高精度控制,易于擴展,可實現智能控制,是目前流行的方式,其控制框圖如圖所示。
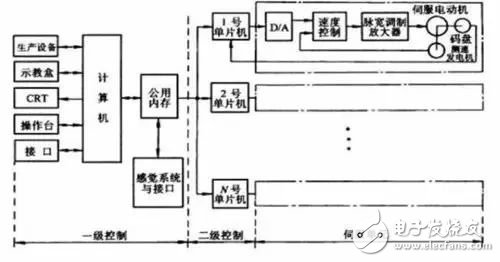
其主要思想是“分散控制,集中管理”,即系統對其總體目標和任務可以進行綜合協調和分配,并通過子系統的協調工作來完成控制任務,整個系統在功能、邏輯和物理等方面都是分散的,所以又稱為集散控制系統或分散控制系統。
這種結構中,子系統是由控制器和不同被控對象或設備構成的,各個子系統之間通過網絡等相互通訊。分布式控制結構提供了一個開放、實時、精確的機器人控制系統。分布式系統中常采用兩級控制方式。
兩級分布式控制系統
通常由上位機、下為機和網絡組成。上位機可以進行不同的軌跡規劃和控制算法,下位機進行插補細分、控制優化等的研究和實現。上位機和下位機通過通訊總線相互協調工作,這里的通訊總線可以是RS-232、RS-485、EEE-488以及USB總線等形式。
現在,以太網和現場總線技術的發展為機器人提供了更快速、穩定、有效的通訊服務。尤其是現場總線,它應用于生產現場、在微機化測量控制設備之間實現雙向多結點數字通信,從而形成了新型的網絡集成式全分布控制系統—現場總線控制系統。
分布式控制系統的優點在于:系統靈活性好,控制系統的危險性降低,采用多處理器的分散控制,有利于系統功能的并行執行,提高系統的處理效率,縮短響應時間。
機器人控制系統分類
1、程序控制系統:給每一個自由度施加一定規律的控制作用,機器人就可實現要求的空間軌跡。
2、自適應控制系統:當外界條件變化時,為保證所要求的品質或為了隨著經驗的積累而自行改善控制品質,其過程是基于操作機的狀態和伺服誤差的觀察,再調整非線性模型的參數,一直到誤差消失為止。這種系統的結構和參數能隨時間和條件自動改變。
3、人工智能系統:事先無法編制運動程序,而是要求在運動過程中根據所獲得的周圍狀態信息,實時確定控制作用。
4、點位式控制系統:要求機器人準確控制末端執行器的位姿,而與路徑無關。
5、連續軌跡控制系統:要求機器人按示教的軌跡和速度運動。
6、控制總線:國際標準總線控制系統。采用國際標準總線作為控制系統的控制總線,如VME、MULTI-bus、STD-bus、PC-bus。
7、自定義總線控制系統:由生產廠家自行定義使用的總線作為控制系統總線。
8、編程方式:物理設置編程系統。由操作者設置固定的限位開關,實現起動,停車的程序操作,只能用于簡單的拾起和放置作業。
9、在線編程:通過人的示教來完成操作信息的記憶過程編程方式,包括直接示教模擬示教和示教盒示教。
10、離線編程:不對實際作業的機器人直接示教,而是脫離實際作業環境,示教程序,通過使用高級機器人,編程語言,遠程式離線生成機器人的作業軌跡。
-
傳感器
+關注
關注
2551文章
51207瀏覽量
754535 -
控制系統
+關注
關注
41文章
6633瀏覽量
110679 -
機器人
+關注
關注
211文章
28490瀏覽量
207448
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論