") 關(guān)于藍(lán)牙控制Atmel制造的機(jī)器人手臂的介紹
關(guān)于藍(lán)牙控制Atmel制造的機(jī)器人手臂的介紹
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28632瀏覽量
208005 -
愛特梅爾
+關(guān)注
關(guān)注
0文章
197瀏覽量
22033
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
STM32的醫(yī)療康復(fù)機(jī)器人手臂控制系統(tǒng)
器設(shè)計(jì)的醫(yī)療康復(fù)機(jī)器人手臂控制系統(tǒng),具有杰出的功耗控制和電機(jī)控制的高級(jí)定時(shí)器,能產(chǎn)生3對(duì)可配置并互補(bǔ)輸出的PWM信號(hào)。通過(guò)在Simulink上建立雙閉環(huán)PID算法模型,得到合適的PID
發(fā)表于 08-22 09:31
用意念控制的植入式機(jī)器人手臂
電子發(fā)燒友網(wǎng)核心提示:查爾姆斯理工大學(xué)的研究人員已經(jīng)開發(fā)出世界第一個(gè)使用意念控制的植入式的機(jī)器人手臂。“骨整合”的技術(shù)是意念控制假肢的關(guān)鍵。患者腦電波意念腦電波脈
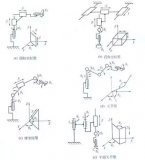
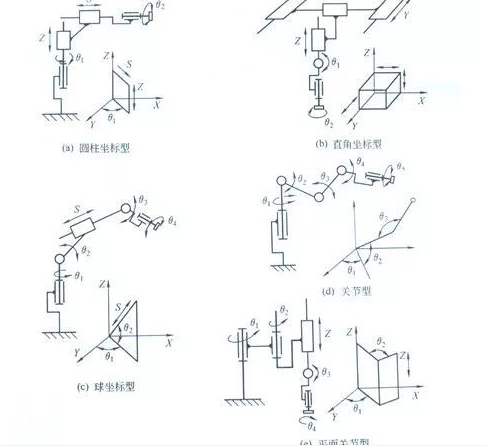
機(jī)器人手臂5種不同的運(yùn)動(dòng)組合
一般機(jī)器人手臂有3個(gè)自由度,即手臂的伸縮、左右回轉(zhuǎn)和升降 (或俯仰)運(yùn)動(dòng)。手臂回轉(zhuǎn)和升降運(yùn)動(dòng)是通過(guò)機(jī)座的立柱實(shí)現(xiàn)的,立柱的橫向移動(dòng)即為手臂的橫移。
關(guān)于智能機(jī)器人手臂機(jī)械結(jié)構(gòu)和接線分析制作
肘部的最大位置不能超過(guò)140度,因?yàn)樵擁?xiàng)目的目的是在平面上構(gòu)建機(jī)器人手臂,并且將攝像頭與用戶處保持在同一高度。我們認(rèn)為只用70度即可,因?yàn)檫@足以彎曲機(jī)器人手臂。
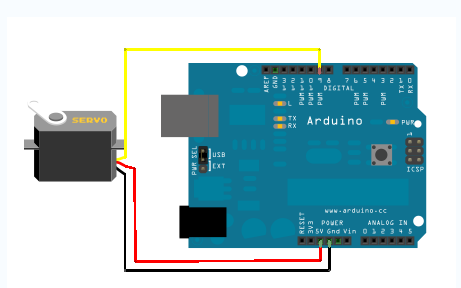
怎樣使用Android手機(jī)的藍(lán)牙控制機(jī)器人手臂
在這個(gè)項(xiàng)目中,我將向您展示如何構(gòu)建Arduino&amp; amp;使用Android手機(jī)的藍(lán)牙控制機(jī)器人手臂。該機(jī)器人手臂可以在手動(dòng)模式下操作,也可以在全自動(dòng)模式下進(jìn)行編程。
在未來(lái)機(jī)器人手臂將可以替代人類的雙手
隨著5G技術(shù)的普及,即將迎來(lái)AI人工智能時(shí)代,很多場(chǎng)景將是無(wú)人自動(dòng)化的控制生產(chǎn)運(yùn)作,這樣我們需要更多的機(jī)器人手臂,機(jī)器人手臂可以將執(zhí)行工作的手臂與思考工作的頭腦分離。
發(fā)表于 09-17 09:41
?2040次閱讀
Hibot機(jī)器人手臂Float Arm可用于哪些應(yīng)用環(huán)境
能代替“臟亂、危險(xiǎn)、嚴(yán)重”的工作的機(jī)器人手臂“Float Arm”
Arduino與樹莓派打造Chatbot語(yǔ)音控制機(jī)器人手臂
在網(wǎng)上有許多關(guān)于制作機(jī)器人手臂的項(xiàng)目,但他們都有類似的控制方式,我感覺缺少了一些樂(lè)趣!所以我們決定制作一個(gè)可以使用聊天機(jī)器人控制的
發(fā)表于 03-16 11:47
?30次下載
中國(guó)科大展示軟體機(jī)器人手臂在日常生活中的巨大應(yīng)用潛力
軟體機(jī)器人手臂由于具有本質(zhì)柔順性和連續(xù)變形特性,在智能制造、醫(yī)療康復(fù),家庭服務(wù)等領(lǐng)域有巨大的研究?jī)r(jià)值和廣泛的應(yīng)用前景。最新一期的機(jī)器人頂刊《The International Journal
機(jī)器人手臂使用哪種型號(hào)的泰和承比較合適
機(jī)器人手臂的伸縮、橫向移動(dòng)均屬于直線運(yùn)動(dòng)。實(shí)現(xiàn)手臂往復(fù)直線運(yùn)動(dòng)的機(jī)構(gòu)形式比較多,常用的有活塞油(氣)缸、齒輪齒條機(jī)構(gòu)、絲杠螺母機(jī)構(gòu)以及連桿機(jī)構(gòu)等。由于活塞油(氣)缸的體積小、重量輕,因而在機(jī)器人
發(fā)表于 03-17 17:16
?637次閱讀
Arduino機(jī)器人手臂
方案介紹MARK 1是可編程的Arduino機(jī)器人手臂。但是,還不止這些,該機(jī)械臂可以由手勢(shì)控制。硬件部件:Arduino UNO?? ?×?? ?1個(gè)?? ?伺服馬達(dá)MG996R×?? ?6?? ?5V電池組×?? ?1個(gè)??
發(fā)表于 12-30 14:42
?3次下載
用于Arduino Due的DIY Braccio機(jī)器人手臂護(hù)罩
電子發(fā)燒友網(wǎng)站提供《用于Arduino Due的DIY Braccio機(jī)器人手臂護(hù)罩.zip》資料免費(fèi)下載
發(fā)表于 06-14 15:07
?0次下載

如何創(chuàng)建FPGA控制的機(jī)器人手臂
機(jī)器人技術(shù)處于工業(yè) 4.0、人工智能和邊緣革命的前沿。讓我們看看如何創(chuàng)建 FPGA 控制的機(jī)器人手臂。

如何創(chuàng)建FPGA控制的機(jī)器人手臂?
機(jī)器人技術(shù)處于工業(yè) 4.0、人工智能和邊緣革命的前沿。讓我們看看如何創(chuàng)建 FPGA 控制的機(jī)器人手臂。






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論