Arduino IDE 機器人元器件 機器人套件
2024-03-14 23:22:09
TokyMaker Arduino IDE,Blockly 機器人元器件 機器人套件
2024-03-14 22:42:42
Raspberry Pi pHAT 機器人元器件 機器人套件
2024-03-14 22:34:43
Arduino 機器人元器件 機器人套件
2024-03-14 22:34:43
云臺 機器人套件
2024-03-14 22:33:42
輪式 機器人套件
2024-03-14 22:33:28
輪式 機器人套件
2024-03-14 22:29:39
機器人元器件 機器人套件
2024-03-14 22:03:38
Makeblock Me 機器人元器件 機器人套件
2024-03-14 21:40:36
抓爪 機器人套件
2024-03-14 21:40:28
Raspberry Pi Pico Python 機器人元器件 機器人套件
2024-03-14 21:30:12
輪式 機器人套件
2024-03-14 21:30:12
抓爪 機器人套件
2024-03-14 21:13:28
坦克胎面 機器人套件
2024-03-14 21:13:28
抓爪 機器人套件
2024-03-14 21:13:24
機器人元器件 機器人套件
2024-03-14 21:13:23
機器人元器件 機器人套件
2024-03-14 20:37:55
輪式 機器人套件
2024-03-14 20:37:52
機器人元器件 機器人套件
2024-03-14 20:37:45
兩足 機器人套件
2024-03-14 20:35:14
電子發(fā)燒友網(wǎng)站提供《維修鍛壓機瓦座磨損哪種辦法更合適.docx》資料免費下載
2024-03-11 16:06:04 0
0 實驗名稱:柔性驅(qū)動器的性能測試
研究方向:機器人的發(fā)展史已經(jīng)超過了100年,機器人也逐漸從復雜笨重,功能單一的傳統(tǒng)機器人進化為更為智能、微型且高集成的多功能機器人。而隨著科技社會的進步
2024-02-27 17:15:22
,我們還使用 M2 號螺母和螺栓將 MG90 型舵機固定在機身前部。
我們把 PCA9685 模塊放在同一區(qū)域,這樣能有效地平衡重力。
現(xiàn)在我們開始組裝機器人手部。只需把 SG90 型舵機安裝到兩端
2023-12-26 15:18:26
LabVIEW開發(fā)六軸工業(yè)機器人運動控制系統(tǒng)
本項目開發(fā)了一個高效的工業(yè)機器人控制系統(tǒng),重點關(guān)注于運動學算法和軌跡規(guī)劃算法的實現(xiàn)和測試。LabVIEW作為一個關(guān)鍵技術(shù),在項目中扮演了核心角色
2023-12-21 20:03:18
人形機器人在構(gòu)型方面接近于人類的軀體,包括手臂、雙足、軀干和脖子。除此之外,還要具備一些視覺類的感知能力,以及用于控制運動的算力能力。
2023-11-27 11:18:46 247
247 傳感器通常安裝在機器人的手臂上。具體來說,它通常被安裝在機器人的手腕上,以便能夠準確地跟蹤電弧的位置和運動。電弧跟蹤傳感器的作用是檢測電弧的位置和運動,并將這些信息傳輸?shù)?b class="flag-6" style="color: red">機器人的控制系統(tǒng),以便機器人能夠根據(jù)這些信息來控制
2023-11-23 15:02:57202 力控制的關(guān)鍵問題是如何準確地控制機器人的力或力矩輸出,以滿足特定的任務需求。以下是一些與力控制相關(guān)的關(guān)鍵問題: 1. 力/力矩傳感器選擇和校準:選擇合適的傳感器來測量機器人的力或力矩輸出,并進行校準
2023-11-09 17:26:58238 pic單片機做掃地機器人有什么優(yōu)勢
2023-11-09 07:24:46
最近調(diào)試一款機器人產(chǎn)品,用到了之前的伺服電機FOC控制,實現(xiàn)了幾個電機串聯(lián),用來實現(xiàn)機器人手臂控制,現(xiàn)在做機器人的很多,覺得這套方案可以幫助更多的人,快速搭建控制系統(tǒng),實現(xiàn)關(guān)節(jié)手臂的控制,以及路徑規(guī)劃,而不用被串聯(lián)、調(diào)參、電機驅(qū)動所束縛。所以把這套方案單獨拿出來,希望可以幫助大家。
2023-11-08 16:48:52656 
達芬奇SP機器人于2020年在進博會首次展出。今年達芬奇SP機器人手術(shù)相繼在博鰲完成首例真實世界泌尿外科、耳鼻咽喉科及婦科研究。
2023-11-08 12:37:44334 傳統(tǒng)機器人比較僵化,通常不適合執(zhí)行精細任務或近距離與人類互動,而軟體機器人的靈活性和柔順性降低了人機交互過程中的潛在風險,并適應更廣泛的任務。
2023-11-03 15:48:10106 
機器人編程需要什么軟件
2023-11-01 07:34:30
要求以操縱工件進行加工。下面來了解下搬運機器人工作原理及結(jié)構(gòu)組成。一、搬運機器人的設計原理搬運機器人為可移動門架式結(jié)構(gòu),手臂承載機構(gòu)可沿著導軌進行移動,導軌安裝與立
2023-10-27 08:07:52654 
機器人技術(shù)處于工業(yè) 4.0、人工智能和邊緣革命的前沿。讓我們看看如何創(chuàng)建 FPGA 控制的機器人手臂。
2023-10-24 17:26:20935 
機器人技術(shù)處于工業(yè) 4.0、人工智能和邊緣革命的前沿。讓我們看看如何創(chuàng)建 FPGA 控制的機器人手臂。
2023-10-24 17:15:33456 
焊接材料、焊接位置、焊接速度、焊接電流等。 2.?安裝機器人:將自動焊接機器人安裝在合適的位置,并確保機器人的手臂和焊接頭可以自由移動。 3.?編程機器人:使用機器人編程軟件,對機器人進行編程,使其能夠執(zhí)行所需的焊接操作
2023-10-19 15:16:22598 電子發(fā)燒友網(wǎng)站提供《教你怎樣選擇合適的工業(yè)機器人.doc》資料免費下載
2023-10-10 10:21:000 本文檔的主要內(nèi)容詳細介紹的是Arduino教學機器人的使用教程
2023-09-27 06:53:26
的運營成本、人力成本還在不斷提高(如:辦公場地的租金、員工的工資、社保公積金、節(jié)假日福利等)。
如今的智能電話機器人,每天的電話撥打量可達800-1000通,相比人工提高了3-5倍,大大縮短了名單的篩選
2023-09-21 11:09:59
邁步手部康復外骨骼機器人,機器人可以帶動手指完成兩種康復運動——雙向彎曲運動和內(nèi)收外展運動。機器人可適應不同患者的手指尺寸,外骨骼手的長度可調(diào)節(jié),長時間佩戴不會使患者產(chǎn)生疲勞感。手部康復外骨骼機器人
2023-09-20 17:38:02
下肢外骨骼康復機器人BEAR-A1利用仿生學、人體工學、機器人技術(shù),為下肢運動功能障礙者提供康復訓練。通過對患者髖、膝關(guān)節(jié)提供助力完成康復訓練,可以有效降低治療師工作強度,提高康復訓練效率,提高患者
2023-09-20 17:31:33
邁步機器人BEAR-H系列是用于輔助腦卒中患者步態(tài)康復訓練的新型可穿戴式下肢外骨骼機器人。機器人擁有主動被動訓練模式,通過對患者髖、膝、踝關(guān)節(jié)提供助力完成行走訓練,可以節(jié)省人力,并提高康復效果
2023-09-20 17:25:48
利用 Matlab 建立移動機器人的動力學模型 ,在虛擬現(xiàn)實 (VR )環(huán)境下 ,實時仿真移動機器人路徑跟蹤的運動特性 ,為基于 Internet 的機器人遙操作試驗搭建了仿真平臺 。 實驗結(jié)果表明
2023-09-20 06:24:09
運動控制與機器人密切相關(guān)。工業(yè)應用中的機器人必須透過由多款電機所構(gòu)成的致動器才能自行移動,以執(zhí)行任務或透過機器手臂抓取工具。
2023-09-06 14:21:02552 
,Imaginaiton重要的合作伙伴DoubleQ生態(tài)對外發(fā)布了最新的AI機器人技術(shù):仿生手掌部位的手勢識別和柔性手臂原型演示。仿生手掌具有多個關(guān)節(jié),能單獨對每個手指進行控制,手腕
2023-09-06 08:29:53449 
機器人工具快換裝置是一種專門設計用于機器人系統(tǒng)的裝置,用于在生產(chǎn)過程中實現(xiàn)機器人手臂上工具的快速更換。它通常由機械構(gòu)件、傳感器、控制系統(tǒng)和執(zhí)行器組成。機器人工具快換裝置的主要功能是在機器人操作過程
2023-09-06 08:09:01593 入地了解焊接機器人的工作原理和應用領(lǐng)域。 第一部分:機械結(jié)構(gòu) 焊接機器人的機械結(jié)構(gòu)是其重要組成部分之一,它包括以下核心組件: 機器人臂:機器人臂是焊接機器人的主體部分,通常由多個關(guān)節(jié)連接而成,以模仿人類手臂的運動。
2023-09-04 15:23:20362 碼垛機器人的呈現(xiàn),是依據(jù)機器人的高新技能開展而演化而來的,能夠仿照人手和臂的某些動作功用,用以按固定程序抓取、轉(zhuǎn)移物件或操作東西的主動操作設備。它可代替人的深重勞作以完成出產(chǎn)的機械化和主動化,能在
2023-08-29 14:33:05472 什么是爬壁機器人爬壁機器人是一種可以在垂直或近垂直表面上移動和操作的機器人。它們被設計用于執(zhí)行特定任務,例如在建筑物外墻進行清潔、在工廠內(nèi)部的管道進行檢測和維護,或在危險的環(huán)境中進行探索
2023-08-01 00:27:02889 機器人焊接是一種利用工業(yè)機器人自動執(zhí)行焊接任務的技術(shù)或過程,而普通焊機則是一種通常由人手操作的設備,用于將兩種或更多金屬件及非金屬件熔接在一起。
2023-07-21 16:05:51592 電子發(fā)燒友網(wǎng)站提供《Scorbot ER-V+自由度機器人手臂控制器和模擬器設計.zip》資料免費下載
2023-07-10 15:08:570 在ev3 app中,機器人可以移動到物體的前面,將物體撿起,并搬運到指定的地方。但是,很難將此功能連接到 Alexa。如果可以制造,倉庫不需要勞動力。
2023-07-07 16:13:271 通過5G定制網(wǎng)信號傳輸,遠在邵逸夫醫(yī)院的專家操作在醫(yī)院的手術(shù)機器人醫(yī)生端,向位于北京展區(qū)的機械臂發(fā)出動作指令。在高清視野輔助下,遠程專家可以通過可轉(zhuǎn)腕機械臂的靈活操作,精準完成對模型的解剖、分離、縫合等各項手術(shù)模擬動作。
2023-07-05 15:09:03615 關(guān)于如何選購焊接機器人,今天專業(yè)工業(yè)機器人集成商無錫金紅鷹小編將為大家詳細介紹:購買焊接機器人之前我們需要確定所需購買的焊接機器人種類,確定完機器人類型后我們需要根據(jù)機器人通用技術(shù)指標和焊接機器人特殊技術(shù)指標兩大指標來選購合適的焊接機器人。
2023-07-05 13:53:32547 一些學機電的,去過一些類似公司做一些機器人的調(diào)試校準,每天就調(diào)程序,調(diào)打磨角度,提高工藝精度。至于工業(yè)機器人算法以及研發(fā)類的,目前國內(nèi)這類的公司比較少,且對于個人的能力要求也比較高,用學歷來看的話,都是碩士
2023-06-26 14:04:22688 近年來,我國智能電網(wǎng)建設已進入全面快速發(fā)展的新階段,極大地推動了智能巡檢機器人的市場需求。
2023-06-20 09:24:08676 
小型機器人為什么可以自由地展現(xiàn)多種姿態(tài)與動作呢?
2023-06-19 08:13:55
電子發(fā)燒友網(wǎng)站提供《用于Arduino Due的DIY Braccio機器人手臂護罩.zip》資料免費下載
2023-06-14 15:07:510 對于自動化行業(yè)的資深的機電工程師來說,選擇合適的機器人也許是一個簡單的工作。但是對于那些第一次準備購買、導入機器人的設計人員或工廠來說,也許會有些迷茫。如何選擇一個合適的工業(yè)機器人?下面簡單介紹下工業(yè)機器人選型需要考慮的原則:
2023-06-08 16:00:591103 不能完成的技巧性的工作。
所以機器人是一種模擬人手的技巧性設備。它的主要內(nèi)容就是。
繞
轉(zhuǎn)
穿
鉗
拿
放
給
總之,它的主要內(nèi)容就是研究人手的基本動作。
而研究人手的動作的主要內(nèi)容就是研究一次動作的每
2023-06-06 16:18:33
國內(nèi)手術(shù)機器人裝機數(shù)量與機器人手術(shù)數(shù)量屢破新高,并保持高速增長。截至目前,微創(chuàng)機器人、天智航、思睿哲、精鋒醫(yī)療、醫(yī)達健康、鍵嘉醫(yī)療、華科精準、鑄正機器人、和華瑞博等企業(yè)推出的手術(shù)機器人均已實現(xiàn)商業(yè)化裝機。
2023-06-03 10:05:52194 
機器人手持膠槍,涂膠后進展示位,沒復位下一個機器人就把展示位這個件抓走了是缺少什么信號。
2023-05-24 13:59:00
我正在開發(fā)一些 WSN 機器人,
我現(xiàn)在正在使用 2 個 ESP8266,一個充當 WSN 傳感器節(jié)點,另一個充當機器人節(jié)點,
機器人在從其他 WSN 傳感器節(jié)點獲取數(shù)據(jù)時正在工作(現(xiàn)在亮起LED
2023-05-22 09:55:59
隨著機器人的轉(zhuǎn)動而改變方向,這就需要步進電機芯片進行精準的控制。此外,兒童陪護機器人中的手臂也需要步進電機芯片的支持,以實現(xiàn)手臂的精準運動控制。
步進電機芯片還應具有良好的穩(wěn)定性和可靠性,以確保兒童陪護
2023-05-11 15:12:45
從特斯拉展示的關(guān)于人形機器人擎天柱的視頻來看,與去年視頻相比,該視頻中的機器人似乎更加靈活,能夠行走。但不同于以往僅有一個人形機器人現(xiàn)身,本次視頻中還展示了一個人形機器人正在制造另一個人形機器人。由此,也引發(fā)了業(yè)界對“機器人造機器人”的熱議。
2023-05-05 10:43:511013 機器人關(guān)節(jié)電機是專業(yè)為機器人關(guān)節(jié)設計研發(fā)生產(chǎn)。電機既有中空大孔徑,能保證關(guān)節(jié)模組完美融合的組合, 電機的定轉(zhuǎn)子機構(gòu)緊湊,轉(zhuǎn)子采用了高性能稀土永磁材料,此系列電機轉(zhuǎn)矩脈動極低,易于速度控制和精確
2023-04-20 10:07:10
泰科關(guān)節(jié)機器人具備哪些優(yōu)勢? 一、編程簡單可以讓無編程經(jīng)驗的操作人員能快速設置和操作我們的直觀、3D 可視化協(xié)作式機器人。只需將機器人手臂移動至需要的位置,或觸摸方便易用的觸屏
2023-04-19 15:13:28
RJS-II系列關(guān)節(jié)模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協(xié)作機器人關(guān)節(jié),一體化集成的RJS-II不僅結(jié)構(gòu)尺寸更小,性價比更高,為您解決機器人在更多復雜環(huán)境中的適應性和穩(wěn)定性
2023-04-19 15:03:00
RJS-II系列關(guān)節(jié)模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協(xié)作機器人關(guān)節(jié),一體化集成的RJS-II不僅結(jié)構(gòu)尺寸更小,性價比更高,為您解決機器人在更多復雜環(huán)境中的適應性和穩(wěn)定性
2023-04-19 14:54:26
深圳泰科智能TB6-R15協(xié)作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領(lǐng)域的自動化作業(yè)任務。這款協(xié)作
2023-04-19 11:43:30
深圳泰科智能TB6-R15協(xié)作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領(lǐng)域的自動化作業(yè)任務。這款協(xié)作
2023-04-19 11:39:15
深圳泰科智能TB6-R15協(xié)作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領(lǐng)域的自動化作業(yè)任務。這款協(xié)作
2023-04-19 11:29:30
深圳泰科智能TA6系列協(xié)作機器人是泰科智能自主研發(fā)的6自由度的協(xié)作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設計的RJS系列關(guān)節(jié)模組,既輕便靈活、運行平滑柔順,同時滿足
2023-04-19 11:14:26
TA6-R5協(xié)作機器人是泰科智能自主研發(fā)的6自由度的協(xié)作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設計的RJS系列關(guān)節(jié)模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-19 10:58:47
RJU系列關(guān)節(jié)模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機器人關(guān)節(jié),而是一款能夠給機器人更多設計空間,和應用領(lǐng)域的關(guān)節(jié),客戶可根據(jù)自身產(chǎn)品方向,自由定位
2023-04-19 10:53:03
RJU系列關(guān)節(jié)模組一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機器人關(guān)節(jié),而是一款能夠給機器人更多設計空間,和應用領(lǐng)域的關(guān)節(jié),客戶可根據(jù)自身產(chǎn)品方向,自由定位
2023-04-19 10:48:11
,讓機器人開發(fā)更自由高精度絕對值編碼器,精準控制運動軌跡,多圈絕對值編碼器分辨率標配16單圈和16多圈,保障機器人定位更精準、運行軌跡的穩(wěn)定性更好減少機器人開發(fā)過程
2023-04-19 10:40:37
TB6-R10協(xié)作機器人是一款功能更強的工業(yè)級協(xié)作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業(yè)任務,可應用于工廠自動化、汽車、3C、醫(yī)療、電力、航天、科研、教育等多個行業(yè)、多場景的自動化需求。
2023-04-19 09:38:36
TB6-R15協(xié)作機器人自重僅為37KG,卻擁有處理高達15KG的有效負載,工作半徑可達1333mm,卓越的伸展能力和有效負載,能夠處理更大型、高精準度領(lǐng)域的自動化作業(yè)任務。這款協(xié)作機器人功能強大、高自重負載比、高可靠性、模塊化關(guān)節(jié)設計,易于末端擴展外部設備,可以實現(xiàn)快速安裝部署。
2023-04-19 09:27:59
TB6-R5協(xié)作機器人是一款靈活的輕型工業(yè)協(xié)作機器人,具有精巧的機械結(jié)構(gòu)設計。這款協(xié)作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產(chǎn)應用需求。模塊化
2023-04-19 09:16:32
TA6系列機械臂是泰科智能自主研發(fā)的協(xié)作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設計的關(guān)節(jié)模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-19 08:56:58
機器人關(guān)節(jié)電機是專業(yè)為機器人關(guān)節(jié)設計研發(fā)生產(chǎn)。電機既有中空大孔徑,能保證關(guān)節(jié)模組完美融合的組合, 電機的定轉(zhuǎn)子機構(gòu)緊湊,轉(zhuǎn)子采用了高性能稀土永磁材料,此系列電機轉(zhuǎn)矩脈動極低,易于速度控制和精確
2023-04-18 17:35:19
產(chǎn)品優(yōu)勢專注機器人關(guān)節(jié)研發(fā),RJS系列關(guān)節(jié)模組具有定位精度高、性能可靠等特點。 模塊化設計RJS關(guān)節(jié)模組集成無框電機、驅(qū)動器、諧波減速器、編碼器、制動器于一體,結(jié)構(gòu)小巧緊湊,6軸RJS關(guān)節(jié)
2023-04-18 14:04:34
TA6-R5協(xié)作機器人是泰科智能自主研發(fā)的6自由度的協(xié)作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設計的RJS系列關(guān)節(jié)模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-17 17:57:19
TA6-R5協(xié)作機器人是泰科智能自主研發(fā)的6自由度的協(xié)作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協(xié)同工作。 采用自主設計的RJS系列關(guān)節(jié)模組,既輕便靈活、運行平滑柔順,同時滿足負荷的需求
2023-04-17 17:49:50
深圳泰科智能TB6-R10協(xié)作機器人是一款功能更強的工業(yè)級協(xié)作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業(yè)任務,可應用于工廠自動化、汽車、3C、醫(yī)療、電力、科研、教育等多個行業(yè)、多場景的自動化需求。
2023-04-17 16:36:37
RJU系列關(guān)節(jié)模組——面向商業(yè)、生活服務類應用 一款全新的,有別于RJS系列,RJS-II系列,SHD系列,等傳統(tǒng)外形的機器人關(guān)節(jié),而是一款能夠給機器人更多設計空間,和應用領(lǐng)域的關(guān)節(jié),客戶
2023-04-17 16:25:29
深圳泰科智能TB6-R5協(xié)作機器人是一款靈活的輕型工業(yè)協(xié)作機器人,具有精巧的機械結(jié)構(gòu)設計。這款協(xié)作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產(chǎn)
2023-04-17 16:12:03
深圳泰科智能TB6-R5協(xié)作機器人是一款靈活的輕型工業(yè)協(xié)作機器人,具有精巧的機械結(jié)構(gòu)設計。這款協(xié)作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產(chǎn)
2023-04-17 15:57:13
深圳泰科智能TB6-R10協(xié)作機器人是一款功能更強的工業(yè)級協(xié)作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業(yè)任務,可應用于工廠自動化、汽車、3C
2023-04-17 15:49:48
深圳泰科智能TB6-R10協(xié)作機器人是一款功能更強的工業(yè)級協(xié)作機器人,能夠勝任10KG的有效負載的自動化任務,工作半徑可達1333mm,適用于大范圍、大負載的作業(yè)任務,可應用于工廠自動化、汽車、3C
2023-04-17 15:40:56
深圳泰科智能TB6系列協(xié)作機器人是泰科智能自主研發(fā)的6軸輕型協(xié)作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協(xié)同工作。采用自主設計研發(fā)RJSII系列關(guān)節(jié)模組,既輕便靈活、運行平滑柔順,同時
2023-04-17 15:31:15
深圳泰科智能TB6系列協(xié)作機器人是泰科智能自主研發(fā)的6軸輕型協(xié)作機器人,具有拖動示教、安全防碰撞等功能,可以直接與人協(xié)同工作。采用自主設計研發(fā)RJSII系列關(guān)節(jié)模組,既輕便靈活、運行平滑柔順,同時
2023-04-17 15:25:07
深圳泰科智能TB6-R5協(xié)作機器人是一款靈活的輕型工業(yè)協(xié)作機器人,具有精巧的機械結(jié)構(gòu)設計。這款協(xié)作機器人有效負載為5KG,自重僅為23KG,重復定位精度可達±0.05mm,適應多樣性、柔性生產(chǎn)
2023-04-17 15:15:06
RJS-II系列關(guān)節(jié)模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協(xié)作機器人關(guān)節(jié),一體化集成的RJS-II不僅結(jié)構(gòu)尺寸更小,性價比更高,為您解決機器人在更多復雜環(huán)境中的適應性和穩(wěn)定性
2023-04-17 15:07:26
RJS-II系列關(guān)節(jié)模組是泰科智能推出的一款基于模塊化理念設計、輕巧、高精度的協(xié)作機器人關(guān)節(jié),一體化集成的RJS-II不僅結(jié)構(gòu)尺寸更小,性價比更高,為您解決機器人在更多復雜環(huán)境中的適應性和穩(wěn)定性
2023-04-17 15:02:00
掃地機器人在進行清潔工作的過程中,需要涉及到地面的清洗和水的使用。為了避免機器因為水量過多或不足而造成電路故障或無法正常運作的情況,需要通過液位檢測來控制水量。在清水箱中,一個水位傳感器被置于填充
2023-04-15 11:21:46
今天小編就為大家介紹一種用于替代人工對設備進行檢查和維護的特種機器人——智能巡檢機器人。機器人大致可分為工業(yè)機器人、服務機器人和特種機器人,雖然相較于前兩類機器人而言特種機器人的市場規(guī)模最小,但隨著
2023-04-12 15:49:23
首先,最重要的源頭是評估導入的機器人,是用于怎樣的應用場合以及什么樣的制程。
若是應用制程需要在人工旁邊由機器協(xié)同完成,對于通常的人機混合的半自動線,特別是需要經(jīng)常變換工位或移位移線的情況,以及配合新型力矩感應器的場合,協(xié)作型機器人(Cobots)應該是一個很好的選項。
2023-03-24 10:02:461325 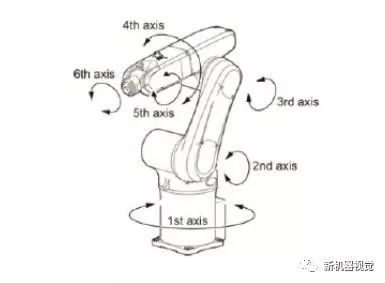
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論