 強化學習——老虎機問題是表格型解決方案工具的一種
強化學習——老虎機問題是表格型解決方案工具的一種
無論有沒有去過賭場,相信大多數人都不會對老虎機感到陌生。作為賭場里最常見的娛樂設備,老虎機不僅在現實中廣受人們歡迎,它也頻繁出現在電視電影乃至動畫片中,連一些常見的APP里都有它的身影。
往機器里投入硬幣后,玩家需要拉下拉把轉動玻璃框中的圖案,如果三個圖案一致,玩家能獲得所有累積獎金;如果不一致,投入的硬幣就會被吞入累積獎金池。這個問題看似簡單,但很多人也許都忽視了,其實它和圍棋、游戲一樣,也是個強化學習問題。
首先,我們要明確一點——老虎機問題是表格型解決方案工具的一種。之所以這么說,是因為我們可以把所有可能的狀態放進一個表格中,然后讓表格告訴我們需要了解的問題狀態,繼而為解決問題找出切實的解決方案。
k-armed Bandit Problem
單臂老虎機:只有一根側面拉桿
假設我們有一臺K臂老虎機,每根拉桿都能提供固定的一定數額的金錢,一次只能拉下一根拉桿,但我們不知道它們的具體回報是多少。在這個情景中,k根拉桿可以被視為k種不同的動作(action),拉下拉桿的總次數T是我們的總timestep。整個任務的目標是實現收益的最大化。
設在第t次拉下拉桿時,我們采取的動作是At,當時獲得的回報是Rt。那么對于任意動作a,它的動作值(value)q?(a)是:
這個等式表示的是無論何時,如果我們選擇動作a,我們獲得的實際回報就應該等于動作a的預期回報。
把上面這個句子再讀三四遍,你覺得它行得通嗎?如果我們事先已經知道拉下這個拉桿的最大收益是多少,那出于貪婪的目的,我們肯定每次都會選最好的動作,然后使最終回報最大化。但在強化學習問題中,貪婪算法并不一定等同于最優策略,這一步的貪婪可能會對下一步產生負面影響。
雖然很困難,但我們真的很想實現q?(a),所以對于timestep t,設Qt(a)是q?(a)的近似值:
那么我們又該怎么獲得Qt(a)?
注:上文中的回報(reward)和動作值(value)不是同一個概念。回報指的是執行動作后的當場回報,動作值是一個長期的回報。如果你吸毒了,一小時內你很high,回報很高,但長期來看,你獲得的動作值就很可怕了。需要注意的是,因為賭博機只需要一個動作,所以這里的q?(a)不是未來回報之和,只是期望回報,它和其他地方的q?(a)也不一樣(雖然有濫用符號之嫌,但還是請多包涵啦)。
動作值方法
函數Qπ(x, a)表示從狀態x出發,執行動作a后再使用策略π帶來的累計獎賞,稱為“狀態-動作值函數”(state-action value function)。——周志華《機器學習》
首先,我們需要估計動作值,再據此決定要采取的行動。
估算動作值
求解q?(a)近似值的一種簡單方法是使用樣本平均值:
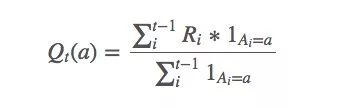
上述等式看起來好像有什么說法,但它其實很簡單——選擇動作a時,我們獲得的平均回報是多少。這個均值可以被視為q?(a)的近似值,因為換幾個符號,我們就能發現這就是強大數定律(SLLN)的表達式。
換句話說,它意味著Qt(a)必須收斂于q?(a):
比起概率收斂,這種收斂更強大,但它其實也沒法保證Qt(a)一定能收斂。
動作選擇規則:貪婪
“貪婪者總是一貧如洗。”當面對巨大誘惑時,一些人會因為貪婪越過自己的底線,去吸毒,去犯罪,但他們在獲得短暫快感的同時也失去了更多東西。強化學習中同樣存在類似的問題,如果它是貪婪的,它會找出迄今為止最大的動作值:
并依據這個動作值去選擇每一步動作。這樣做的后果是智能體從頭到尾只會選擇同一套動作,而從不去嘗試其他動作,在很多情況下,這樣的策略并不是最優策略。
動作選擇規則:?-Greedy
那么我們該怎么糾正它的貪婪?之前我們在《強化學習——蒙特卡洛方法介紹》一文中已經介紹過ε-greedy:對于任何時刻t的執行“探索”小概率ε<1,我們會有ε的概率會進行exploration,有1-ε的概率會進行exploitation。這可以簡單理解成拋硬幣,除了正面和反面,它還有一個極小的立起來的概率。
雖然當智能體“頭腦發熱”時,它還是會義無反顧地貪婪,但相比貪婪策略,?-Greedy隨機選擇策略(不貪婪)的概率是ε/|A(s)|。
癥結:非平穩的動作值
導致這種現象的主要原因是動作值會隨時間推移發生變化,即之前我們研究的時靜態地拉桿,而不是隨機的、動態的拉桿。以動作值為例,比起我們之前假設的q?(a),它更應該被表示成q?(a, t)。
依據之前的動作值估計,我們有:
它也可以被寫成:
看起來SGD可以在這里發揮一些作用。如果它是平穩的,那q?(a)收斂的概率就是100%;如果它不平穩,我們一般不會希望Rn=Rn-1,因為當前回報會影響當前的動作值。
這里我們把權重1/n替換成α(α∈(0,1]):
這是一個指數平均值,它在幾何上衰減之前回報的權重。設函數αn(a)是第n個timestep,也就是第n次拉下拉桿時某個特定獎勵的權重。因為老虎機問題只需考慮動作a,所以這個函數也可以簡化成α(a)。
為了保證上式能收斂,我們還需要一些其他條件。
條件一
上式表示對于任何初始值Q1∈?,它都滿足q?(a)∈?。這個條件要求保證timestep足夠大,以最終克服任何初始條件或隨機波動
條件二
這個式子表示這些timestep將“足夠小以確保能收斂到一個小值”。簡而言之,第二個條件保證最終timestep會變小,以保證收斂。
既然如此,我們之前為什么要設αn(a)=α∈(0,1]呢?它不是一個常數嗎?這樣的閾值會不會影響收斂?
這些猜想都是正確的,但(0,1]這個閾值也有它存在的價值。我們在之前的Qn+1=Qn+αn(Rn+Qn)上繼續計算,最后可以獲得一項α(1-α)n-iRi,因為α小于1,所以給予R的權重隨著介入獎勵次數的增加而減少。
因為最佳動作值時非平穩的,所以我們不想收斂到一個特定的價值。
動作選擇規則:樂觀的初始值
到目前為止,我們必須非常隨意地設定Q1(a)的初始值,它本質上是一組用于初始化的超參數。這里有個小訣竅,我們可以設初始值Q1(a)=C?a,其中C>q?(a)?a。
這樣之后,因為Qn(a)比估計值偏高,這時智能體會積極探索其他動作,當它越來越接近q?(a)時,智能體就開始貪婪了。換句話說,假設我們設當前拉桿的樂觀回報是3,但智能體嘗試一次后,發現回報只有1,低于預期值,于是它會把其他拉桿全部嘗試一遍。雖然前期效率很低,但到后期,智能體已經掌握哪些拉桿會產生高值,效果就接近“貪婪”了。
這種方法時可行的,在某種程度上,如果時間充裕,這個過程也可以被看作是模擬退火。但從整體來看,樂觀初始值前期的大量“exploration”是不必要的,它對于非平穩問題來說不是最好的答案。
動作選擇規則:置信上限選擇
在機器學習系統中,Bias與Variance往往不可兼得:如果要降低模型的Bias,就一定程度上會提高模型的Variance;如果要降低Variance,Bias就會不可避免地提高。針對兩者間的trade-off,下面的式子是一個很好的總結:
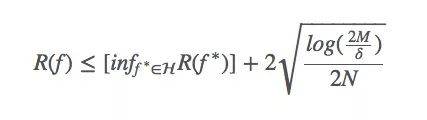
其中,
R(f)是假設f的(理論上)的風險;
R(f< *)是在假設集H中,假設f的最小風險;
M是假設集|H|的大小;
N是其中的樣本數;
δ是一個常數(如果非要知道這個常數是什么,只能說它是我們選擇一個差的假設的概率)。
這里有兩個重點:
樣本數量非常少,我們的邊界非常松散。我們不知道目前的假設是否是最好的假設。
我們的假設越大,PAC(近似正確)學習的約束就越松散。
置信上限(UCB)是一個非常強大的算法,它可以用類似Bias-Variance權衡的方法來解決不同的問題。在老虎機問題中,我們可以把timestep t當成假設集大小M,因為隨著t逐漸增加,an也會逐漸增加,相應的At就很難選擇。
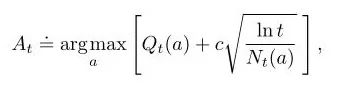
每選一次a,不確定項就會減少,分母Nt(a)增加;另一方面,每一次選擇了a以外的行為,t會增加但Nt(a)不會改變,不確定評估值會增加。
梯度老虎機算法
截至目前,我們一直在努力估計q?(a),但如果說這個問題還有除了行動值以外的解決方法呢?比如我們該如何學習一個動作的偏好?
設動作偏好為Ht(a),它和回報無關,只是一個動作相對于另一個動作的重要性。那么At應該符合gibbs分布(也就是機器學習的softmax分布):
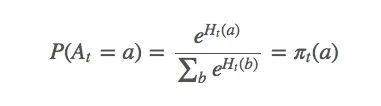
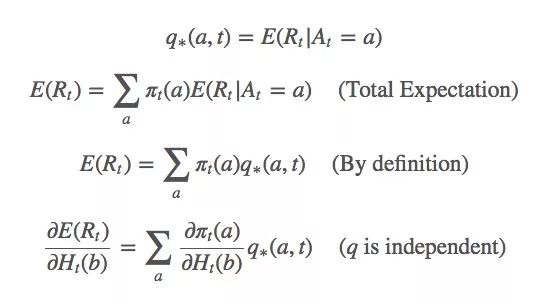
對于這個式子,我們該怎么基于梯度計算最大似然估計?首先,我們對Ht(a)做梯度上升,因為它是我們的變量。我們想最大化E(Rt):
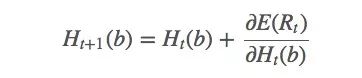
Ht(a)的更新規則如下所示:
gibbs分布分解:
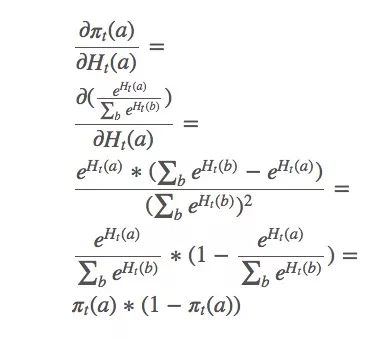
這只是整個梯度的一個偏導數。那么b≠a的動作呢?下面是省略計算過程的結果:
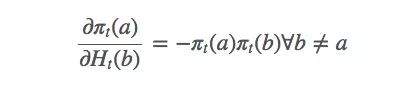
由此可得:
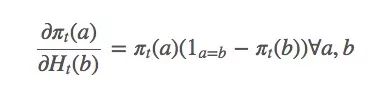
因為:

相應的,這個等式也是成立的:

由上述等式可得:
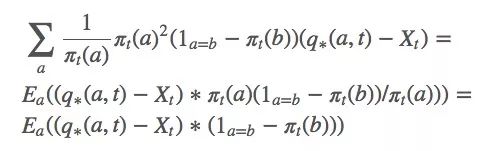
因為q?(a,t)被包含在動作a的預期值內,它也可以被寫成Rt。那等式里的Xt是什么?坦率地說,你想它是什么它就是什么,嚴謹起見,我們可以設Xt是Rt的平均值。
計算梯度后獲得新的更新規則:

其中a是t時采取的動作。由于找到a的期望值很困難,我們可以用隨機值來更新:

選擇動作的簡單方法是計算argmaxaπt(a),問題就解決了。
備注
下面是上述算法的一個比較圖:
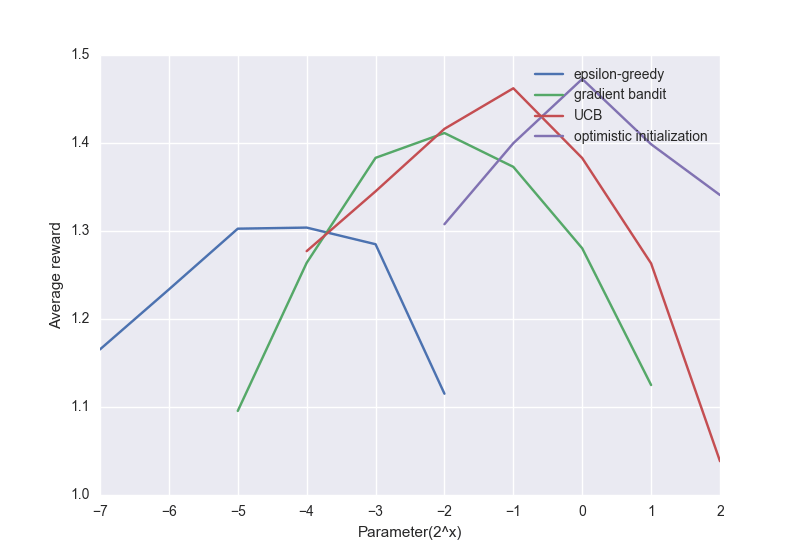
盡管簡單的方法表現不太好,但對很多強化學習問題來說,它們也稱得上是最先進的算法了。
-
算法
+關注
關注
23文章
4629瀏覽量
93188 -
強化學習
+關注
關注
4文章
268瀏覽量
11281
原文標題:強化學習——多臂老虎機問題
文章出處:【微信號:jqr_AI,微信公眾號:論智】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
Facebook推出ReAgent AI強化學習工具包
深度強化學習實戰
將深度學習和強化學習相結合的深度強化學習DRL
統計假設測試、多臂老虎機方法,揭示了多臂老虎機在實踐中的優勢
深度強化學習到底是什么?它的工作原理是怎么樣的
強化學習在智能對話上的應用介紹
MindSpore 首發:隱私保護的 Bandit 算法,實現電影推薦






 工商網監
工商網監
評論