 機器人選擇陀螺儀時喜歡使用的指標是漂移,這對機器人意味著什么?
機器人選擇陀螺儀時喜歡使用的指標是漂移,這對機器人意味著什么?
一年一度的FIRST機器人挑戰賽結束了,全球數千名高中生展開競爭,在 6 周內設計、構建和測試機器人。ADI 在今年的賽季上為參賽隊伍提供了哪些器件呢?參賽隊伍為什么要使用這些器件呢?
這與去年賽季上 ADI 提供的套件中包含的陀螺儀板相同。使用這些板的代碼已經集成到 WPI 庫中,因此只需要將板插入 RoboRIO 的 SPI 連接器中,就可以立即開始工作了。我們在冠軍賽上和幾支隊伍交談過,并且看到去年很多隊伍使用它們都在自動運行期間取得了好成績。采用陀螺儀是確定機器人朝向哪個方向的一種簡便方法,令自動運行期間執行轉彎或是在掃射時保持麥克納姆驅動的機器人朝向正確的方向都非常便捷。ADXRS450 陀螺儀板是參賽隊伍非常好的一個起步之選,尤其是對不了解機器人陀螺儀的隊伍。
ADI 提供—— ADIS16448 10自由度IMU板
ADIS16448 工業級慣性測量單元(IMU)今年再次列入FIRST Choice。如果的確需要精確的運動控制,此款IMU是理想之選。每個單元都在工廠獨立校準,這意味著機器人將更精確。劇烈振動的環境(例如安裝在有電機和氣動裝置的競技機器人上,以及撞到墻上)也會導致成本較低的陀螺儀出現明顯誤差,但是 ADIS16448 恰恰能出色地抑制這些影響,畢竟它是為工業級 UAV 設計的!所有這些都意味著用于幫助機器人判別朝向時的超高性能。代碼可以通過 此處的github獲得,感謝 jchong,還有現成的 安裝工具,提供給使用LabVIEW的隊伍。此外,我們知道隊伍過去使用這個板有些問題,我們很高興發布了最新款的 RoboRIO 圖像,讓隊伍可以獲得比往年更好的 IMU性能。這適用于我們所有的IMU板,不論獲得的時間。
大多數隊伍在為機器人選擇陀螺儀時喜歡使用的指標是漂移。我們來探討一下這對機器人意味著什么……
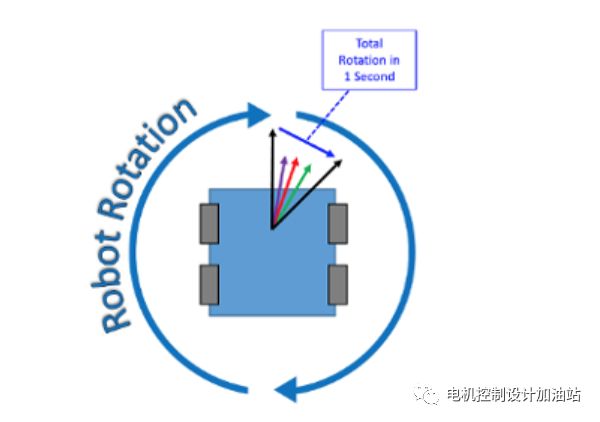
大多數陀螺儀,包括 ADXRS450 和 ADIS16448 IMU 中的陀螺儀,產生一個輸出,單位是度/秒。這是在特定時間單位t內旋轉速率的度量。數值越大,機器人旋轉得越快。陀螺儀不會簡單地輸出機器人已旋轉的度數。陀螺儀會在給定的時間段內讀取數百個讀數,如下圖中的紫色、紅色、綠色線條所示。如果將這些讀數加在一起,則最終會得到在設定時間段內(下例中為1秒)發生的實際角度變化。這在微積分術語中就叫積分。對于那些學過微積分的人(或那些還記得“當年”微積分課的“老伙計”),這與計算曲線圍成的面積相同。這個數學計算是在 WPI 庫中完成的,或對 IMU 來說,是在上述代碼鏈接中完成的。
當首次啟動機器人時,機器人放置的方向將被設置為0度。把這看作是機器人眼中的“正北”或者筆直前進的方向(例如,朝向對手隊伍的駕駛站)。
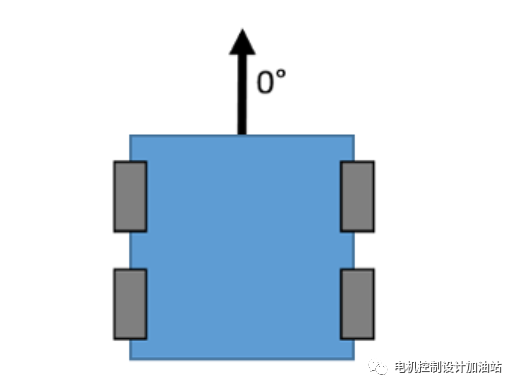
在本例中,上方代表機器人的前方
然而,因為沒有任何陀螺儀是十全十美的,所以這個方向會隨時間而漂移。還記得我們如何獲得實際方向的角度嗎?必須將每個采樣加起來。隨時間推移,每個獨立讀數中的每個小誤差都會累加起來。這些誤差可能來自任何數目的不同內部和外部來源。(如果您有興趣了解更多關于所有這些誤差源的信息,可以查看文章《MEMS陀螺儀中主要噪聲 源的預測和管理》)對這種漂移影響最大的因素是陀螺儀的偏置穩定度規格,這是衡量陀螺儀在長時間段內測量結果穩定性的一個指標。如果將機器人開啟一個小時并且不移動它,陀螺儀在一個小時結束時讀取的數值卻根本不是零。
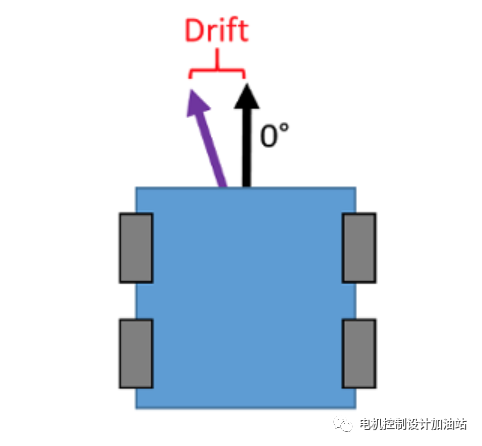
同樣,上方代表機器人的前方
這就是通常隊伍所說的陀螺儀漂移。一旦考慮到上述鏈接文章中所提到的不同的誤差來源,參賽隊伍會發現,IMU的漂移介于每小時 20 至 30 度之間。乍一看,這看上去像是漂移很大!但是,如果您看一下這在比賽過程中意味著什么,就會發現這種漂移實際上并不是太糟糕。如果假設機器人在比賽開始前保持了 7 分鐘的開機時間,機器人會認為它的前進方向只改變了 3 度左右。
到比賽結束時,這個數值接近 4 或 5 度,其實是很小的數字,而且非常容易管理。
-
ADI
+關注
關注
146文章
45859瀏覽量
251225 -
機器人
+關注
關注
211文章
28627瀏覽量
207954 -
陀螺儀
+關注
關注
44文章
791瀏覽量
98877
原文標題:陀螺儀的漂移指標,對機器人意味著什么
文章出處:【微信號:motorcontrol365,微信公眾號:電機控制設計加油站】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論