陀螺儀的種類很多,按用途來(lái)分,它可以分為傳感陀螺儀和指示陀螺儀。傳感陀螺儀用于飛行體運(yùn)動(dòng)的自動(dòng)控制系統(tǒng)中,作為水平、垂直、俯仰、航向和角速度傳感器。指示陀螺儀主要用于飛行狀態(tài)的指示,作為駕駛和領(lǐng)航儀表使用。
2016-10-26 20:25:35 4221
4221 
2個(gè)9軸陀螺儀jy901通過(guò)51單片機(jī)驅(qū)動(dòng)無(wú)刷電機(jī)1.采集陀螺儀信號(hào)數(shù)據(jù),三軸角加速度,三軸角速度三軸角度,轉(zhuǎn)化成信號(hào)輸出2.通過(guò)轉(zhuǎn)化的信號(hào),來(lái)控制無(wú)刷電機(jī),3.驅(qū)動(dòng)方式我們提供。我們會(huì)提供現(xiàn)金獎(jiǎng)勵(lì)
2017-06-13 15:35:10
三軸陀螺儀程序
2015-04-20 18:32:12
`剛搞的三軸陀螺儀,分享一下`
2014-07-03 22:26:19
,MCU通過(guò)控制LM298N電機(jī)驅(qū)動(dòng)模塊來(lái)控制直流減速電機(jī),進(jìn)而控制擺桿的狀態(tài),并使用LCD顯示相關(guān)參數(shù)。方案的比較與選擇2.1傳感器的選擇 方案一:采用三軸陀螺儀測(cè)量擺桿的偏轉(zhuǎn)角度。當(dāng)選用三軸陀螺儀檢測(cè)擺桿的偏轉(zhuǎn)角度時(shí),雖然可以計(jì)算擺桿的偏轉(zhuǎn)角度,但是傳感器必須要固定在擺桿上,同時(shí)需與M...
2021-11-30 06:35:50
(旋轉(zhuǎn))和skopein(看)兩字合為gyro scopei一字來(lái)命名這種儀表。 那時(shí)常聽(tīng)到別人說(shuō)三軸、六軸、九軸陀螺儀,那其中到底有哪些區(qū)別呢?跟小編一起來(lái)了解下。 三軸陀螺儀和六軸的區(qū)別 軸
2018-11-08 16:12:15
文章目錄前言一、陀螺儀傳感器陀螺儀:三軸陀螺儀和六軸的區(qū)別六軸的區(qū)別和九軸陀螺儀的區(qū)別二、實(shí)驗(yàn)設(shè)備1.串口6軸加速度計(jì)/陀螺儀MPU6050模塊2.USB轉(zhuǎn)TTL 3.3V 5V3.硬件設(shè)備準(zhǔn)備三
2021-08-06 08:09:57
請(qǐng)問(wèn)各位大神,如何用公式節(jié)點(diǎn)讀取陀螺儀數(shù)據(jù),陀螺儀型號(hào)是6050,謝謝!!!
2017-08-26 10:08:21
陀螺儀漂移很大 怎么解決啊有沒(méi)有用過(guò)的指導(dǎo)一下
2014-07-22 09:57:31
陀螺儀漂移測(cè)試原理及其實(shí)驗(yàn)技術(shù)
2016-08-17 12:09:47
維護(hù)方位和角速度的設(shè)備。它是一個(gè)旋轉(zhuǎn)的輪子或圓盤,其中旋轉(zhuǎn)軸可以不受影響的設(shè)定在任何方向。當(dāng)旋轉(zhuǎn)發(fā)生時(shí),根據(jù)角動(dòng)量守恒定律,該軸的方向不受支架傾斜或旋轉(zhuǎn)的影響。2.MPU6050三位角度加速度陀螺儀??MPU6050是一個(gè)6軸運(yùn)動(dòng)處理傳感器。它集成了3軸MEMS陀螺儀,3軸MEMS加速度計(jì),以及一個(gè)可擴(kuò)
2022-02-10 06:35:58
陀螺儀原理及應(yīng)用
2019-07-20 15:42:35
陀螺儀原理及應(yīng)用
2020-04-04 18:24:07
目前正在做超聲波測(cè)風(fēng)速風(fēng)向的項(xiàng)目,所測(cè)風(fēng)速風(fēng)向?yàn)樗蕉S面內(nèi)的數(shù)據(jù),為防止儀器抖動(dòng)偏轉(zhuǎn)造成測(cè)量誤差,現(xiàn)在想用陀螺儀進(jìn)行校準(zhǔn),陀螺儀測(cè)得的為儀器姿態(tài)角,想通過(guò)姿態(tài)角和坐標(biāo)系轉(zhuǎn)換矩陣,將儀器直接測(cè)得
2019-05-31 04:36:04
文章目錄【實(shí)驗(yàn)?zāi)康摹俊緦?shí)驗(yàn)原理】一、陀螺儀簡(jiǎn)介二、MPU6050簡(jiǎn)介【實(shí)驗(yàn)環(huán)境】硬件設(shè)備:軟件環(huán)境:【實(shí)驗(yàn)步驟】第一步 配置工程環(huán)境第二步 陀螺儀寄存器讀取函數(shù)和初始化函數(shù)第三步 編寫(xiě)main.c
2021-08-06 06:08:22
陀螺儀的原理 以及怎么調(diào) 急求急求啊{:10:}{:10:}{:10:}{:10:}{:10:}{:10:}
2013-07-22 10:10:02
陀螺儀是什么來(lái)的?他有什么作用?在全國(guó)電設(shè)競(jìng)賽中有什么例子嗎?求各位大伙幫幫忙解釋!十分感謝!
2017-07-30 17:06:12
`這陀螺儀和重力傳感器有什么區(qū)別呢?區(qū)別很多,但最大的區(qū)別就是重力傳感對(duì)于空間上的位移感受維較少,能做到6個(gè)方向的感應(yīng)就已經(jīng)很不錯(cuò)了,而陀螺儀則是全方位的。這很重要,毫不夸張的說(shuō),這兩者不是一個(gè)級(jí)別
2020-09-03 07:29:47
當(dāng)然當(dāng)我傾斜裝置時(shí),Z陀螺儀讀數(shù)相對(duì)于角度減慢。角度越陡,讀數(shù)越慢。我想傾斜補(bǔ)償可以用三角法,但我嘗試過(guò)各種各樣的東西,但我沒(méi)能把它弄對(duì)。我希望能夠測(cè)量在一個(gè)特定軸上旋轉(zhuǎn)的程度,而不考慮在這個(gè)轉(zhuǎn)彎期間
2018-11-26 15:59:12
設(shè)備當(dāng)前的狀態(tài),而這三個(gè)“鋼圈”所在的軸,也就是三軸陀螺儀里面的“三軸”,即X軸、y軸、Z軸,三個(gè)軸圍成的立體空間聯(lián)合檢測(cè)各種動(dòng)作,然后用多種方法讀取軸所指示的方向,并自動(dòng)將數(shù)據(jù)信號(hào)傳給控制系統(tǒng)。因此
2020-12-17 16:31:35
個(gè)“鋼圈”則會(huì)因?yàn)樵O(shè)備的改變姿態(tài)而跟著改變,通過(guò)這樣來(lái)檢測(cè)設(shè)備當(dāng)前的狀態(tài),而這三個(gè)“鋼圈”所在的軸,也就是三軸陀螺儀里面的“三軸”,即X軸、y軸、Z軸,三個(gè)軸圍成的立體空間聯(lián)合檢測(cè)各種動(dòng)作,然后用多種
2020-09-09 08:48:00
最近聽(tīng)大牛的傳感器同事的陀螺儀專業(yè)講座,深入淺出的講解讓小編對(duì)陀螺儀的原理與應(yīng)用有種頓悟趕腳,抽空整理部分內(nèi)容,給對(duì)這個(gè)技術(shù)不太明了的小伙伴們科普下哦~陀螺儀是用來(lái)測(cè)量角速率的器件,在加速度功能基礎(chǔ)上,可以進(jìn)一步發(fā)展,構(gòu)建陀螺儀。
2019-07-25 06:15:32
效果,如橫屏改豎屏、賽車游戲拐彎等等。 作為輸入設(shè)備。陀螺儀還可以用作輸入設(shè)備,它相當(dāng)于一個(gè)立體的鼠標(biāo),這個(gè)功能和第三大用途中的游戲傳感器很類似,甚至可以認(rèn)為是一種類型。 同時(shí),除了我們熟悉的智能手機(jī)
2020-09-04 07:52:53
的特性,看完大家就能完全理解陀螺儀了。 1.現(xiàn)在智能手機(jī)上采用的陀螺儀是MEMS(微機(jī)電)陀螺儀,手機(jī)中陀螺儀的運(yùn)用首先用在游戲的控制上,相比傳統(tǒng)重力感應(yīng)器只能感應(yīng)左右兩個(gè)維度的(多軸的重力感應(yīng)是可以
2018-11-08 16:14:38
對(duì)于角速度傳感器,很多人可能會(huì)比較陌生,不過(guò),如果說(shuō)起陀螺儀,大家還是比較熟悉的。陀螺儀,是一種用來(lái)測(cè)量角速度的裝置。根據(jù)不同的工作原理,陀螺儀有哪些類型呢?
2019-09-12 09:05:05
/id_XNDcyMDIwNjE2.html 資料二:絕對(duì)輸出iMEMS?陀螺儀與比率ADC的配合使用:https://ezchina.analog.com/thread/6549 資料三:校準(zhǔn)iMEMS?陀螺儀:https
2016-01-18 15:31:32
。
測(cè)量的結(jié)果是對(duì)上述三個(gè)軸,無(wú)論正轉(zhuǎn)反轉(zhuǎn),對(duì)陀螺讀數(shù)積分的結(jié)果都是約410度,而不是360度。
我想問(wèn)一下ADIS16365的陀螺儀讀數(shù)是否有需要折算尺度因數(shù)?我們現(xiàn)在就是按照datasheet的說(shuō)明把陀螺的讀數(shù)乘了0.05得到“度/秒”。
2023-12-28 07:05:22
` 本帖最后由 zwt_cn 于 2017-10-25 09:33 編輯
大家好!群里可有用過(guò)ADXRS453陀螺儀的大俠?遇到問(wèn)題請(qǐng)教:這是檢測(cè)的兩個(gè)角度的比較,紅的是實(shí)際角度,綠色是陀螺儀測(cè)試到的角度明顯兩個(gè)測(cè)量的角速度誤差就是蠻大的所以到后來(lái)越積越多 `
2017-10-25 09:28:47
陀螺儀開(kāi)啟的時(shí)候會(huì)有偶發(fā)機(jī)器靜止的時(shí)候一抖動(dòng)不停。我們這邊做過(guò)實(shí)驗(yàn),將一臺(tái)重沒(méi)出現(xiàn)這個(gè)問(wèn)題的機(jī)器和一臺(tái)出現(xiàn)過(guò)這種問(wèn)題機(jī)器對(duì)調(diào)陀螺儀。問(wèn)題點(diǎn)是跟著陀螺儀走。主控是用的HI3559V200海思有大佬能解決問(wèn)題嗎, 有償
2022-09-22 16:31:03
誤差。公式5、公式6和公式7顯示了對(duì)準(zhǔn)誤差對(duì)各陀螺儀繞全局坐標(biāo)系中指定軸旋轉(zhuǎn)的響應(yīng)的影響。在這些公式中,對(duì)準(zhǔn)角度誤差的余弦引入一個(gè)比例誤差。圖5. 正交三軸陀螺儀的對(duì)準(zhǔn)誤差對(duì)準(zhǔn)誤差還會(huì)對(duì)各軸產(chǎn)生跨軸
2018-10-17 10:39:42
誤差。公式5、公式6和公式7顯示了對(duì)準(zhǔn)誤差對(duì)各陀螺儀繞全局坐標(biāo)系中指定軸旋轉(zhuǎn)的響應(yīng)的影響。在這些公式中,對(duì)準(zhǔn)角度誤差的余弦引入一個(gè)比例誤差。圖5. 正交三軸陀螺儀的對(duì)準(zhǔn)誤差對(duì)準(zhǔn)誤差還會(huì)對(duì)各軸產(chǎn)生跨軸
2019-10-16 08:00:00
慣性參考系,其中包含三個(gè)相互垂直90°的軸。這三個(gè)軸為MEMS IMU中的各個(gè)傳感器提供方位參考。理想情況下,陀螺儀的各個(gè)旋轉(zhuǎn)軸將與系統(tǒng)參考系中的軸完全對(duì)齊,將IMU安裝到平臺(tái)上之后,其將監(jiān)視運(yùn)行
2018-10-22 16:44:26
慣性參考系,其中包含三個(gè)相互垂直90°的軸。這三個(gè)軸為MEMS IMU中的各個(gè)傳感器提供方位參考。理想情況下,陀螺儀的各個(gè)旋轉(zhuǎn)軸將與系統(tǒng)參考系中的軸完全對(duì)齊,將IMU安裝到平臺(tái)上之后,其將監(jiān)視運(yùn)行
2018-11-01 11:15:18
MEMS陀螺儀介紹
2019-08-28 13:00:59
MEMS陀螺儀介紹
2020-05-14 09:31:29
MPU-6050三軸加速度 陀螺儀模塊資料(基于stm32)
2016-06-03 20:36:03
MPU-6050模塊三軸加速度+三軸陀螺儀簡(jiǎn)介模塊引腳說(shuō)明名稱接線簡(jiǎn)介MPU-6050集成了3軸MEMS陀螺儀,3軸MEMS加速度計(jì),以及一個(gè)可擴(kuò)展的數(shù)字運(yùn)動(dòng)處理器DMP,可用IIC接口連接一個(gè)
2022-02-10 07:17:39
3DM-GX5-25陀螺儀產(chǎn)品亮點(diǎn)集成有三軸加速度計(jì),陀螺儀,磁力計(jì)和溫度傳感器,實(shí)現(xiàn)慣性導(dǎo)航最優(yōu)解雙處理器運(yùn)行自適應(yīng)擴(kuò)展卡爾曼濾波器(EKF),卓越的動(dòng)態(tài)姿態(tài)估算優(yōu)點(diǎn)同類性能最佳偏置跟蹤,誤差估計(jì),閾值標(biāo)志
2020-12-09 16:20:17
mpu6050的陀螺儀采樣頻率為50hz,低通濾波為20HZ,陀螺儀的輸出頻率1kHZ或8HZ,為什么陀螺儀的輸出頻率比采樣頻率還高
2018-05-16 20:16:22
1.設(shè)置好陀螺儀后可以獲取陀螺儀的三軸加速度數(shù)據(jù) ,設(shè)置好量程 ,坐標(biāo)軸既可以進(jìn)行姿態(tài)解算。[code] Accel_X=(i2c_buff[0]
2019-06-13 10:38:30
陀螺儀在水平面轉(zhuǎn)一周,偏航角變化不是從-180——+180,而是-180——+180—— -180——+180—— -180——+180,大約手動(dòng)旋轉(zhuǎn)15°,輸出歐拉角變化180°。用的是發(fā)燒友的六軸陀螺儀和對(duì)應(yīng)例程,請(qǐng)教是哪里的問(wèn)題?感激不盡!
2019-07-23 04:35:57
是世界上第一款集成 6 軸MotionTracking設(shè)備。它集成了3軸MEMS陀螺儀,3軸MEMS加速度計(jì),以及一個(gè)可擴(kuò)展的數(shù)字運(yùn)動(dòng)處理器 DMP( DigitalMotion Proce...
2022-02-10 07:24:32
。陀螺儀在工作時(shí)要給它一個(gè)力,使它快速旋轉(zhuǎn)起來(lái),一般能達(dá)到每分鐘幾十萬(wàn)轉(zhuǎn),可以工作很長(zhǎng)時(shí)間。然后用多種方法讀取軸所指示的方向,并自動(dòng)將數(shù)據(jù)信號(hào)傳給控制系統(tǒng)。 手機(jī)陀螺儀的作用:動(dòng)作感應(yīng)的GUI:通過(guò)
2012-10-19 14:51:35
請(qǐng)教各位大神,這個(gè)陀螺儀如何接線?從陀螺儀出來(lái)只有9根黃線,每根線對(duì)應(yīng)的如圖所示。我現(xiàn)在是2、3腳另外接穩(wěn)壓電源,8、9腳接RS232串口的2、5腳,然后經(jīng)過(guò)USB轉(zhuǎn)換插筆記本上,在串口工具里什么也接收不到,但是如果只接RS232的2腳,一直接收FF。
2017-05-06 21:38:31
樓主新人,準(zhǔn)備看看三軸的加速度傳感器和陀螺儀,然后又看到了MPU-6050(整合了陀螺儀和三軸加速度傳感器),想向大家請(qǐng)教一下加速度傳感器和陀螺儀的區(qū)別,以及MPU-6050與它們之間的區(qū)別。看了一些網(wǎng)友們列出來(lái)的,感覺(jué)不是很懂啊。
2014-03-13 19:10:12
本帖最后由 餅干11 于 2021-8-11 09:44 編輯
我想在一個(gè)比較大的平臺(tái),分別安裝陀螺儀實(shí)現(xiàn)這個(gè)平臺(tái)穩(wěn)定,平臺(tái)是三個(gè)吊輪吊著的,如何讓陀螺儀判斷哪個(gè)吊輪快了或者慢了,然后給單片機(jī)指令去控制吊輪,但是平臺(tái)太大了會(huì)不會(huì)導(dǎo)致陀螺儀不靈敏,比如人在地球上感覺(jué)不到地球自轉(zhuǎn)一樣。
2021-08-11 08:32:28
請(qǐng)問(wèn)哪位大神有用過(guò)ENC-03M單軸陀螺儀的嗎,為什么我測(cè)測(cè)旋轉(zhuǎn)角度只是一個(gè)方向有效,而且值飄的很厲害,求解!還有積分過(guò)程實(shí)在是沒(méi)有理解透徹!求助大神們!
2015-05-13 22:33:03
關(guān)于高精度陀螺儀有兩種方法,一種是民間詢問(wèn)得知誤差1°-2°算高精度陀螺儀。 還有一種說(shuō)法,陀螺儀根本不測(cè)量角度,什么誤差多少度都不是嚴(yán)謹(jǐn)?shù)恼f(shuō)法,陀螺儀的原始數(shù)據(jù)是角速度,單位弧度每秒,把
2018-11-09 16:05:25
` 本帖最后由 shhgkjfzyxgs 于 2016-1-22 17:32 編輯
動(dòng)態(tài)陀螺尋北儀特點(diǎn) - 內(nèi)置三軸光纖陀螺儀和伺服加速度計(jì),可滿足高精度動(dòng)態(tài)尋北- 初次上電對(duì)準(zhǔn)后可無(wú)漂移連續(xù)
2016-01-22 17:30:08
四軸實(shí)現(xiàn)自穩(wěn)飛控上的陀螺儀為什么需要Z軸?X,Y不就行了嗎?
2019-05-29 01:28:56
內(nèi)、外環(huán),它是使陀螺自轉(zhuǎn)軸獲得所需角轉(zhuǎn)動(dòng)自由度的結(jié)構(gòu));(3)附件(是指力矩馬達(dá)、信號(hào)傳感器等)。 三、地磁傳感器與陀螺儀區(qū)別 地磁傳感器與陀螺儀都可以用在導(dǎo)航上,各有優(yōu)點(diǎn)。 陀螺儀是利用陀螺
2021-01-20 14:41:13
基于戰(zhàn)艦V3的MPU6050六軸陀螺儀實(shí)驗(yàn)陀螺儀的分類3軸傳感器指的是3軸的加速度,根據(jù)這個(gè)加速度我們解算出XY兩軸的角度。6軸傳感器指的是3軸的加速度和3軸角速度,根據(jù)這兩個(gè)數(shù)據(jù)我們解算出XYZ三
2022-02-10 06:53:43
什么是陀螺儀?三軸陀螺儀和六軸陀螺儀的區(qū)別在哪?如何使用六軸傳感器去實(shí)現(xiàn)串口與Unity3D的通信呢?
2021-11-09 07:52:26
慣性空間繞正交于自轉(zhuǎn)軸的一個(gè)或二個(gè)軸的角運(yùn)動(dòng)檢測(cè)裝置,手機(jī)上的指南針功能就是一種很好的證明。如通過(guò)其他原理進(jìn)行制作的角運(yùn)動(dòng)檢測(cè)裝置,功能一樣的的也稱陀螺儀。可以精確的分析判斷出使用者的實(shí)際動(dòng)作,通過(guò)他
2018-11-07 09:53:37
如何知道3軸陀螺儀輸出數(shù)據(jù)是否準(zhǔn)確?對(duì)于終端用戶來(lái)說(shuō)都有哪些簡(jiǎn)單方便的方法?
2023-12-29 06:22:45
子午面的三自由度陀螺儀。其外環(huán)軸鉛直,轉(zhuǎn)子軸水平置于子午面內(nèi),正端指北;其重心沿鉛垂軸向下或向上偏離支承中心。轉(zhuǎn)子軸偏離子午面時(shí)同時(shí)偏離水平面而產(chǎn)生重力矩使陀螺旋進(jìn)到子午面,這種利用重力矩的陀螺羅盤稱
2020-09-06 07:49:27
陀螺儀(角速率傳感器或角速度傳感器)是一種可以測(cè)量到物體角速度的裝置。陀螺儀可以感知旋轉(zhuǎn)運(yùn)動(dòng)和方向的變化。角速度不同,運(yùn)動(dòng)產(chǎn)生的電位差也不同。陀螺儀將角速度的變化轉(zhuǎn)換成電信號(hào)輸出。
2020-08-19 06:15:05
通過(guò)懸掛陀螺儀的一組振蕩隔離線圈為陀螺模塊提供4個(gè)信號(hào)/電源連接,從而消除漂移和感應(yīng)定位誤差。 雖然該產(chǎn)品專為使用PowerPoint的演講人而設(shè)計(jì),基于手勢(shì)的控制概念已經(jīng)擴(kuò)展到了許多其他領(lǐng)域,包括
2018-12-05 15:25:46
我正在使用 LSM6DS33 MEMS,發(fā)現(xiàn)在不同的溫度下,設(shè)備陀螺儀的零電平偏移會(huì)發(fā)生顯著變化。我在設(shè)備靜止時(shí)記錄了幾個(gè)記錄,發(fā)現(xiàn)當(dāng)溫度升高時(shí),陀螺儀測(cè)量值始終在 Z 軸增加,X 軸減少,Y 軸
2022-12-16 07:01:06
陀螺儀怎么工作的,怎么使四軸無(wú)人機(jī)平衡的
2023-11-10 07:27:32
電子陀螺儀的三軸,六軸,九軸有什么區(qū)別啊
2015-08-05 20:20:15
陀螺儀檢測(cè)有和缺陷?
2021-10-12 12:55:23
該陀螺儀輸出信號(hào)是怎樣,是否需要采集卡進(jìn)行采集,若需要,對(duì)采集卡的要求是怎樣。希望它最后測(cè)量的精度精度位0.001°是否能夠?qū)崿F(xiàn)。另外它是三軸的陀螺儀嗎?
2019-01-15 11:36:28
你好,
根據(jù)技術(shù)手冊(cè),得知ADIS16300中只有一個(gè)Yaw方向的陀螺儀,一般情況下是將器件水平放置,可測(cè)量水平面的偏航角(Yaw)角速度。但是我目前需要測(cè)量橫滾(Roll)方向上的速度,請(qǐng)問(wèn)是否可以將器件豎立起來(lái),從而用這個(gè)單軸陀螺儀得到某個(gè)垂面的角速度?這樣子做會(huì)不會(huì)帶來(lái)更大的誤差?
謝謝!
2023-12-29 07:33:35
MEMS陀螺儀是如何工作的?
2021-03-18 06:48:50
如何知道3軸陀螺儀輸出數(shù)據(jù)是否準(zhǔn)確?對(duì)于終端用戶來(lái)說(shuō)都有哪些簡(jiǎn)單方便的方法?
2018-08-13 08:05:17
做一個(gè)步速慣性導(dǎo)航的產(chǎn)品 ,需要陀螺儀,請(qǐng)幫忙推薦陀螺儀的芯片,X軸一個(gè),Y軸一個(gè),Z軸一個(gè)
2019-02-15 09:46:18
高精度四軸陀螺儀max21100
2015-11-28 09:48:07
RTA適用于測(cè)試微機(jī)電系統(tǒng)加速度計(jì)和陀螺儀的多軸定位器系列。它們?cè)试S同時(shí)對(duì)多達(dá) 140 個(gè)器件進(jìn)行多站點(diǎn)測(cè)試,同時(shí)提供精確可靠的角位置、速率和加速度運(yùn)動(dòng)。加速度計(jì)使用恒定速度,陀螺儀測(cè)試則采用正弦角
2022-09-26 16:52:21
MEMS單軸陀螺儀芯片利用作用在旋轉(zhuǎn)物體上的科里奧利力。高Q值和相對(duì)靈敏度的壓電單晶通過(guò)采用,雖然體積小,但在振動(dòng)型中實(shí)現(xiàn)了最高的輸入/輸出靈敏度比。
2022-11-21 13:24:32
導(dǎo)彈控制系統(tǒng)中,陀螺精度是系統(tǒng)精度的重要指標(biāo)之一,而陀螺儀隨機(jī)漂移是影響陀螺精度的重要誤差源,因而研究陀螺儀隨機(jī)漂移對(duì)提高陀螺精度有著重要意義。本文在統(tǒng)計(jì)分析
2009-08-13 14:20:14 44
44 三軸陀螺儀是什么 陀螺儀英文名Gyroscope,是一種用來(lái)傳感和維持方向的裝置設(shè)備。陀螺儀是由一個(gè)位于軸心且可旋轉(zhuǎn)的輪子構(gòu)成。 陀螺儀一旦開(kāi)始旋轉(zhuǎn),由于輪子的角動(dòng)量,陀螺儀有
2012-08-30 11:52:597952 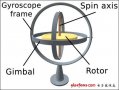
卡爾曼濾波在陀螺儀隨機(jī)漂移中的應(yīng)用
2013-09-25 16:08:0365 就用現(xiàn)在的智能手機(jī)來(lái)研究下陀螺儀的用處,之后還會(huì)介紹清楚陀螺儀的特性,看完大家就能完全理解陀螺儀了。
2017-12-01 15:27:168826 三軸陀螺儀也叫“微機(jī)械陀螺儀”,而“微機(jī)械陀螺儀”也可稱作“MEMS陀螺儀”,即同時(shí)測(cè)定6個(gè)方向的位置,移動(dòng)軌跡,加速。
2017-12-01 16:17:2314565 
6軸陀螺儀是指三軸加速器和三軸陀螺儀合在一起的稱呼。三軸加速器就是感應(yīng)XYZ(立體空間三個(gè)方向,前后左右上下)軸向上的加速,比如你突然把裝有6軸陀螺儀的產(chǎn)品往前推,它就知道你是在向前加速了,從而實(shí)現(xiàn)類似賽車加速的操作。
2017-12-01 16:26:0582441 目前,在陀螺儀應(yīng)用領(lǐng)域,按精度細(xì)分的話,陀螺儀可分為商用陀螺儀、戰(zhàn)術(shù)陀螺儀、導(dǎo)航陀螺儀、戰(zhàn)略陀螺儀。
2020-07-14 16:00:393794 陀螺儀的基本組成 陀螺儀的工作原理 陀螺儀的作用 陀螺儀和重力傳感器有什么區(qū)別呢? 陀螺儀是一種測(cè)量和感知設(shè)備,可用于測(cè)量或檢測(cè)物體的角速度和角度變化。它由幾個(gè)基本組成部分組成,包括旋轉(zhuǎn)的轉(zhuǎn)子、懸浮
2023-12-07 11:26:00878 陀螺儀是一種用于測(cè)量物體旋轉(zhuǎn)的裝置,尤其在航空航天領(lǐng)域和導(dǎo)航應(yīng)用中得到廣泛應(yīng)用。陀螺儀根據(jù)其測(cè)量的軸數(shù)可以分為三軸陀螺儀和六軸陀螺儀。在本文中,我們將詳細(xì)討論三軸陀螺儀和六軸陀螺儀的區(qū)別。 首先
2024-01-02 14:22:101180 陀螺儀是一種用于測(cè)量和感應(yīng)物體旋轉(zhuǎn)和轉(zhuǎn)動(dòng)的設(shè)備,它通常由三個(gè)軸組成:x軸、y軸和z軸。在陀螺儀中,x軸和y軸通常成對(duì)出現(xiàn),關(guān)于它們的比例可以因具體應(yīng)用而異。 首先,我們先了解一下陀螺儀的工作原理
2024-01-17 11:10:11524
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論