 優步事故初步調查_優步自動駕駛事故原因竟是它
優步事故初步調查_優步自動駕駛事故原因竟是它
優步自動駕駛事故事件
18日晚上美國優步科技公司的一輛自動駕駛汽車撞上了一名正在過馬路的女子。被撞女子在被醫后,因傷勢過重死亡。
事發時車速約64km/h 無減速跡象
事故發生在美國亞利桑那州菲尼克斯郊區的一個十字路口附近。當時,優步科技公司的一輛自動駕駛汽車正在公路上進行測試,車內坐有一名操作人員。汽車撞上了一名推著自行車過馬路的女子。女子被送往醫院后不治身亡。
遇難女子名叫埃萊娜·赫茨貝格,現年49歲。警方初步調查確認,事故發生時,肇事車輛正處于自動駕駛模式,行駛速度為大約64公里每小時,并且汽車沒有減速跡象。優步科技公司已經暫停了自動駕駛汽車在北美地區的測試。
優步事故初步調查結果_原因
據科技網站The Verge報道,日前發生的優步自動駕駛汽車致行人死亡案例或事出有因,優步自動駕駛前高管對于技術“安全性能”不重視的冒進態度或還在影響自動駕駛團隊。
早在2016年1月的采訪中,前谷歌工程師安東尼·萊萬多斯基(Anthony Levandowski)曾這樣說道:“我們并不需要多余的剎車與轉向裝置,或者一輛炫酷的新車,我們需要的是更好的軟件!要想更快獲得更好的軟件,我們需要盡快部署首批1000輛測試汽車。我不理解,為何我們公司(谷歌)不這么做,我們團隊中部分人士看起來很害怕向這樣轉型。”不久之后,萊萬多斯基便離開了谷歌,并成立了自己的自動駕駛卡車公司。緊接著,優步(Uber)便收購了該公司,萊萬多斯基也成為優步自動駕駛團隊的重要一員。
對于自動駕駛這一新興技術,萊萬多斯基并不是優步團隊中唯一一個持有“快速行動、打破陳規”觀點的員工。由于Waymo指控萊萬多斯基竊取了谷歌14000份文件并非法使用谷歌的商業秘密,Waymo與優步之間關于自動駕駛商業秘密的訴訟大案也一度成為行業中的關注焦點。而正是由于訴訟案件,萊萬多斯基的觀點也更多得被公之于眾。優步于2017年解雇了萊萬多斯基,并在2018年2月與Waymo和解了訴訟案件。而優步的新任CEO看起來也更有誠意,試圖扭轉前任CEO特拉維斯·卡拉尼克(Travis Kalanick)有毒的企業文化。
雖然優步解雇了萊萬多斯基,但是現在看來,萊萬多斯基的“遺產”依舊籠罩在公司頭上。
在2月份的庭審之中,Waymo代理律師向外界描述了這樣一種工作情形:對于自動駕駛技術,領導所采取的更謹慎、更緩慢的做法遭到了員工的反對。Waymo CEO約翰·克拉夫西克(John Krafcik)表示,萊萬多斯基執意認為轉向以及剎車系統的多余組件是沒有必要的。克拉夫西克在法庭上表示:“可以說,我們在自動駕駛汽車安全方面有著完全不同的觀點。”
《紐約雜志》(New York Magazine)還曾報道稱,萊萬多斯基曾向優步的工程師們表示:“第一起自動駕駛致死案例不是我們引發的,我有點生氣!”不過,之后,萊萬多斯基否認了上述說法。2016年5月,在佛羅里達州發生了一起特斯拉Model S 自動駕駛事故,當時Model S沖入了一輛卡車車底,造成了Model S司機當場死亡。在訴訟案中,根據另一篇采訪報道,萊萬多斯基還曾表示:“由于太多的風險規避、缺乏緊迫感,我們團隊的進展速度根本不夠,我們需要提速!”
而萊萬多斯基發送給卡拉尼克的短信也再次印證了其“急于求成”的觀點。在其中一條短信中,萊萬多斯基寫道:“我們需要通盤考慮自己的戰略,尋找所能找到的一切捷徑。”另一條則寫道:“我認為這是一場競賽,我們需要贏得這場競賽,而第二名則將是第一個失敗者。”
卡拉尼克的回信也相當簡潔:“攻城拔寨!(Burn the village)” 萊萬多斯基也立馬回復:“好的。”在庭審中,卡拉尼克表示他記不得當時聊天記錄的情形了。不管這些對話內容怎樣,是開玩笑還是鄭重其事,但是,自優步自動駕駛汽車致行人死亡之后,萊萬多斯基的言論記錄在外界看來確實不怎么光彩!
優步的發言人則試圖撇清萊萬多斯基與公司之間的關系,并指出,現在公司的領導團隊以及人員也出現了相當大的變動。該發言人表示:“我們認為,科技有能力使得交通運輸比以往更安全,而且,對于保證民眾安全的重大責任,我們一直有著深刻認識。優步的新領導團隊早已向整個公司明確表態,要將安全置于我們公司的核心,這也是當前優步的運營準則。”
Uber所用的自動駕駛技術
從表面上看,除了整體系統出現故障外,很難理解為何會發生這樣的致死事故,因為自動駕駛汽車在設計時就是為了防止這樣的事故發生。
意外進入行駛路徑的人或物幾乎是自動駕駛汽車工程師首先考慮的突發事件。這種情況有很多,例如突然停下來的汽車、一只鹿、過路的行人。工程師在設計自動駕駛系統時會盡早發現他們,確認并采取適當措施,可能會減速、停車、迂回等。
Uber自動駕駛汽車配備了一整套傳感器
Uber自動駕駛汽車配備了多個不同的成像系統,它們既可以執行普通任務(監控附近汽車、標記和車道線),也可以執行特殊任務,例如上述讓汽車減速等措施。在這起事故中,能夠拯救受害者的圖像系統應該不少于四個。
1、頂部激光雷達
這個位于汽車頂部的桶狀物體就是激光雷達系統,它能夠以每秒多次的速度生成汽車周圍的3D成像。激光雷達使用了紅外激光脈沖,遇到物體后會反彈,返回到傳感器,從而在白天或晚上相當細致地偵測靜止和移動的物體。
大雪和濃霧會讓激光雷達的激光器變得模糊,準確性會隨著距離的變長而降低,但是在幾英尺到幾百英尺內,頂部激光雷達依舊是非常重要的成像工具,幾乎存在于每輛自動駕駛汽車上。
頂部激光雷達生成的圖像
如果頂部激光雷達單元運行正常,在沒有被完全遮擋的情況下,它應該能夠分辨出受害者。同時,汽車距離行人還有100多英尺遠(30多米),可以把行人成像傳送給“大腦”進行核對。
2、前端雷達
和激光雷達一樣,雷達發出信號,等待它彈回,但使用的是無線電波,而不是激光。這使得雷達具有更強的抗干擾能力,因為無線電可以穿透雪和霧,但是也會降低分辨率,改變其距離像。
特斯拉自動駕駛系統Autopilot主要依賴雷達
根據Uber部署的雷達數量不同,它所提供的距離像可能存在巨大差異。Uber很可能在汽車前后部署了多個雷達,以實現360度無死角覆蓋。如果Uber是為了給激光雷達提供補充,那么雷達與激光雷達的成像可能會存在大幅重疊,但是更多雷達可以用于偵測其他車輛和更大型障礙物。
3、短焦和長焦光學相機
激光雷達和雷達易于確定物體的形狀,但并不擅長讀取標記,理解物體顏色等。這個任務就交給了可見光相機,它內置了精密的計算機視覺算法,能夠對成像進行實時分析。
Uber自動駕駛汽車上的這些相機密切關注標志著汽車剎車(突然亮紅燈)、交通燈以及穿越十字路口行人的指示器標記。汽車前端尤其會使用多角度、多種類型的相機,這樣才能獲取汽車前進道路的完整圖像。
偵測行人是工程師們試圖解決的最常見問題之一,這種算法已經非常成熟。這一過程通常被稱作“分割”圖像,一般還會涉及標記、樹木、人行動等。
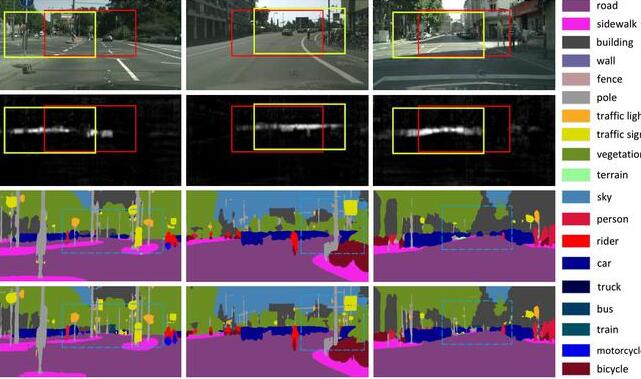
光學相機拍攝的圖像
對于相機來說,夜間工作很困難,這是一個顯而易見的問題。不過,這個問題交給前兩個系統來解決,激光雷達和雷達能夠在夜間工作。即便是在伸手不見五指的環境下,穿著全黑衣服的人也能夠被激光雷達和雷達識別。隨后,這些雷達就會向汽車發出警告,應該減速或者通過汽車大燈確認行人。這可能就是自動駕駛汽車通常沒有夜間視覺系統的原因。
4、安全司機
人類很擅長發現障礙物,即便是人眼沒有激光器。人類的反應時間不是最好的,但是汽車不會作出反應或者作出錯誤反應,經過訓練的安全司機會作出正確反應。
值得指出的是,自動駕駛汽車中還有一個中央計算單元,它能夠收集各個傳感器提供的信息,然后生成一個更加完整的汽車周圍環境成像。
正在測試的自動駕駛汽車
目前還不清楚這起悲劇發生時的具體情況,但是Uber自動駕駛汽車肯定配備了本可以偵測到行人的技術,本可以讓汽車作出正確反應。而且,就算一個系統失效,另一個系統也應該能夠發揮作用。
-
自動駕駛
+關注
關注
784文章
13918瀏覽量
166793 -
優步
+關注
關注
0文章
45瀏覽量
5486
發布評論請先 登錄
相關推薦
優步自動駕駛事故_全球首例致死事故及分析
公布Uber視頻還原事故真相_自動駕駛安全嗎
為何優步沒有在自己的汽車上使用奔馳配備的夜視系統
Uber自動駕駛致死案調查:軟件系統出了問題
自動駕駛事故導致供應商陷入麻煩,自動駕駛技術還有待發展
豐田對優步投資5億美元,雙方建立合作關系共同開發自動駕駛技術
優步無罪,駕駛安全員重點調查,但自動駕駛早已元氣大傷





 工商網監
工商網監
評論