

為汽車應(yīng)用設(shè)計CAN FD網(wǎng)絡(luò)的人員了解這一CAN后繼技術(shù)的優(yōu)勢:新系統(tǒng)保留了現(xiàn)有的CAN概念,如總線仲裁、幀標識、事件控制等,這樣相關(guān)專家就無需應(yīng)對新型策略。
然而,CAN FD的發(fā)展也給網(wǎng)絡(luò)設(shè)計者帶來了一些額外的挑戰(zhàn),這主要歸因于數(shù)據(jù)階段帶寬的提高。例如,CAN FD對不利的網(wǎng)絡(luò)拓撲結(jié)構(gòu)、電磁干擾源和影響以及錯誤的終端連接等明顯更加敏感。為了實現(xiàn)穩(wěn)健的網(wǎng)絡(luò),CAN FD設(shè)計者必須全面考慮這些主要在物理層發(fā)生的影響。
下面這篇論文提出了一種綜合解決方案,該方案在邏輯網(wǎng)絡(luò)分析和物理層事件之間建立了嚴格的時間相關(guān)參考。本文由Vector Informatik GmbH的Mirko Donatzer和Peter Decker撰寫。
車輛通信自動分析
為汽車應(yīng)用設(shè)計CAN FD網(wǎng)絡(luò)的人員了解這一CAN后繼技術(shù)的優(yōu)勢:新系統(tǒng)保留了現(xiàn)有的CAN概念,如總線仲裁、幀識別、事件控制等,以便熟悉CAN的專業(yè)人員無需應(yīng)對新型策略。然而,CAN FD的發(fā)展也給網(wǎng)絡(luò)設(shè)計者帶來了一些額外的挑戰(zhàn),這些挑戰(zhàn)主要歸因于數(shù)據(jù)階段更高的帶寬。例如,CAN FD對不利的網(wǎng)絡(luò)拓撲結(jié)構(gòu)、電磁干擾源及其影響以及錯誤的終端連接等明顯更加敏感。為了實現(xiàn)穩(wěn)健的網(wǎng)絡(luò),CAN FD設(shè)計者必須徹底處理這些主要發(fā)生在物理層的影響。本文提出了一種綜合概念,該概念在邏輯網(wǎng)絡(luò)分析與物理層事件之間建立了嚴格的時間相關(guān)參考。
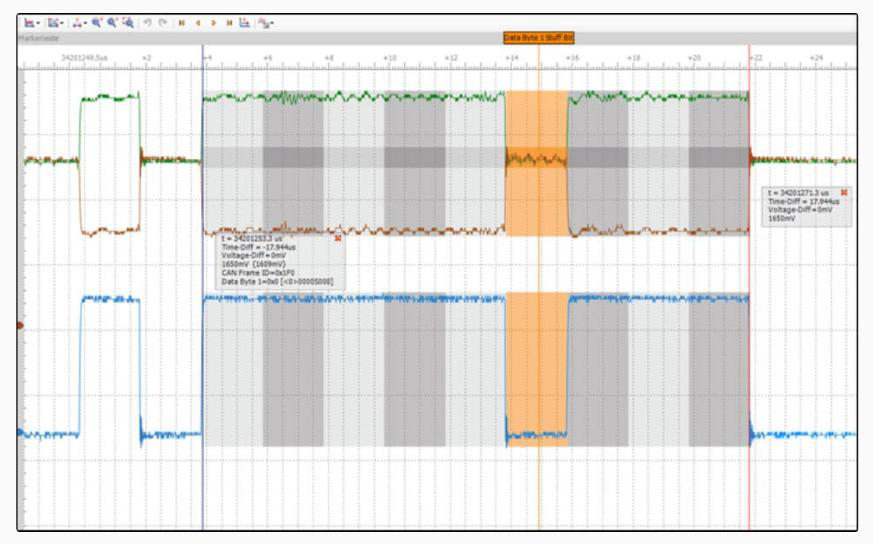
這種方法使用戶能夠在開發(fā)的非常早期階段就檢測出錯誤及其原因,從而對其進行糾正或采取相應(yīng)的措施,并因此更快地得出合適的結(jié)果。與之前的CAN標準相比,CAN FD的核心創(chuàng)新在于其有效載荷從8字節(jié)擴展到了64字節(jié),以及能夠切換到明顯更高的數(shù)據(jù)傳輸速率。后者直接影響網(wǎng)絡(luò)物理特性,因為傳輸每一位的時間相應(yīng)減少,通常的瞬態(tài)響應(yīng)也必須在更短的時間內(nèi)完成。這可能會導致信號質(zhì)量下降。情況進一步復(fù)雜化的是,更快的傳輸速度僅定義在幀的數(shù)據(jù)階段,而仲裁階段則始終保持在較低的比特率。因此,在運行過程中會不斷發(fā)生切換過程,從而改變網(wǎng)絡(luò)行為。切換發(fā)生在開發(fā)人員為此目的而實現(xiàn)的所謂比特率切換(BRS)位的采樣點。
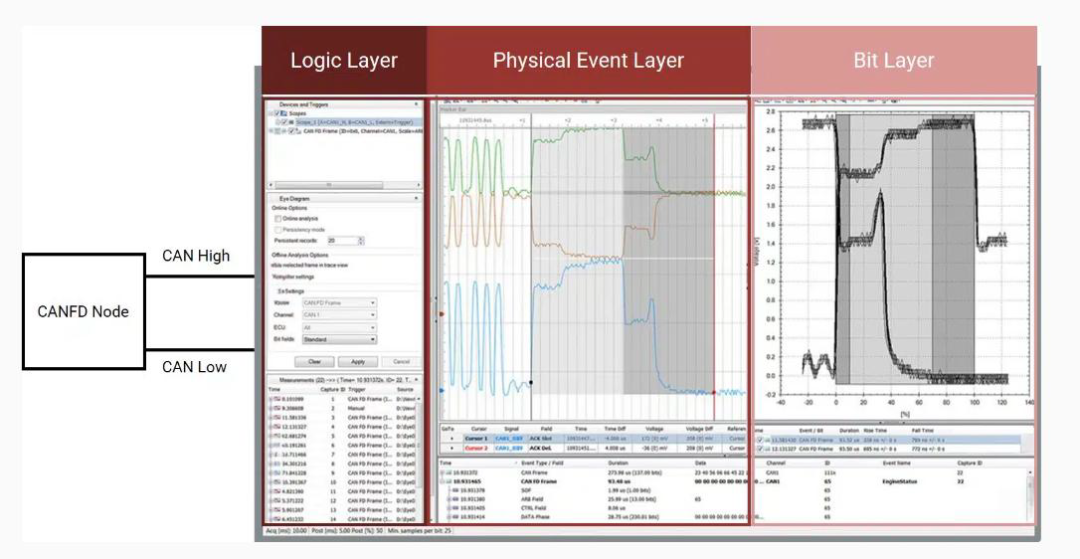
另一方面,循環(huán)冗余校驗(CRC)定界符位的采樣點則用于返回到仲裁比特率。市場上存在許多用于CAN FD網(wǎng)絡(luò)分析和調(diào)試的成熟工具。這些工具基本上都旨在在網(wǎng)絡(luò)設(shè)計階段就開始支持用戶。這些工具通常僅在邏輯層上工作,即它們解釋來自物理層的數(shù)據(jù),并能將其與相應(yīng)的應(yīng)用特定含義相匹配,特別是能夠檢測幀錯誤。CAN FD控制器發(fā)送的比特和字節(jié)被匯總成幀,而這些幀又代表了CAN節(jié)點的應(yīng)用信號。應(yīng)用信號包括例如發(fā)動機ECU的每分鐘轉(zhuǎn)數(shù)、速度或加速度等。在CAN FD ECU的測試和集成過程中,分析工具會提供幫助。這些工具一方面有助于確保相應(yīng)節(jié)點在與應(yīng)用相關(guān)的規(guī)范內(nèi)運行,另一方面有助于確保其發(fā)送/接收行為符合CAN FD規(guī)范的規(guī)定。
CANoe和CANalyzer是用于單個ECU和整個ECU網(wǎng)絡(luò)開發(fā)、測試和分析的綜合軟件工具。它們支持網(wǎng)絡(luò)設(shè)計者、開發(fā)和測試工程師在整個開發(fā)過程中——從規(guī)劃到系統(tǒng)級測試——的各項工作。海洋儀器的選擇是一個集成的示波器解決方案,通過將4通道的PicoScope 5000D系列示波器與標準的Vector網(wǎng)絡(luò)接口相結(jié)合而實現(xiàn)。它可以同時分析多達2個CAN FD或FlexRay網(wǎng)絡(luò),或4個LIN/傳感器/IO信號。PicoScope硬件與網(wǎng)絡(luò)接口同步,因此所有示波器測量都與CANalyzer具有相同的時間基準。借助總線特定觸發(fā)條件和CANoe時間同步,您可以比使用單獨的網(wǎng)絡(luò)分析儀和示波器更快地找到協(xié)議錯誤的原因。
-
示波器
+關(guān)注
關(guān)注
113文章
6351瀏覽量
186678 -
CAN
+關(guān)注
關(guān)注
57文章
2790瀏覽量
465228 -
自動分析
+關(guān)注
關(guān)注
0文章
3瀏覽量
5842
發(fā)布評論請先 登錄
相關(guān)推薦
Pico Technology宣布推出基于PC的新型PicoScope 4000A系列示波器
PicoScope 2000系列示波器的優(yōu)勢 購線網(wǎng)
PicoScope 5000系列PC示波器優(yōu)勢
PicoScope 6000系列高性能電腦示波器的優(yōu)勢
PicoScope 2200A系列示波器用戶指南
DLM系列示波器的總線分析功能
DLM系列示波器絕對是您的不二之選
Tektronix MSO/DPO5000B 系列示波器(參數(shù)及型號)
Tektronix MSO/DPO5000B 系列示波器(技術(shù)資料)
終極USB示波器PicoScope 6000系列
DPO5000B系列示波器的性能指標及特點分析

PicoScope6428E-D示波器:尖端科技,賦能高速測試應(yīng)用
Keysight InfiniiVision 6000 X 系列示波器






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論