") CW32模塊使用 NEO-6M GPS模塊
CW32模塊使用 NEO-6M GPS模塊
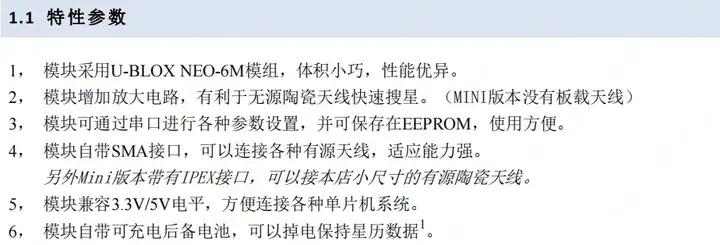
NEO—6M/7M GPS模塊,具有高靈敏度、低功耗、小型化、高追蹤靈敏度,大大擴(kuò)大了其定位的覆蓋面,在普通GPS接收模塊不能定位的地方,如狹窄都市天空下、密集的叢林環(huán)境,NEO-6M都能高精度定位。模塊的高靈敏度、小靜態(tài)漂移、低功耗及輕巧的體積,適用于車載、手持設(shè)備如PDA,車輛監(jiān)控、手機(jī)、攝像機(jī)及其他移動定位系統(tǒng)的應(yīng)用,是GPS產(chǎn)品應(yīng)用的好選擇。
一、模塊來源
模塊實(shí)物展示:

資料鏈接:https://pan.baidu.com/s/1QvwMg9JbkzFauYmwExWcnQ
資料提取碼:8888
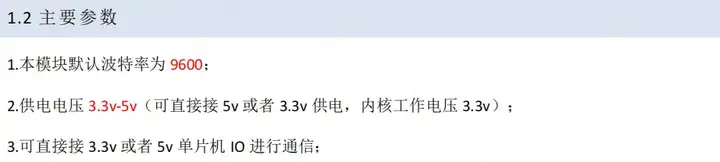
工作電壓:3.3V-5V
工作電流:10-26mA
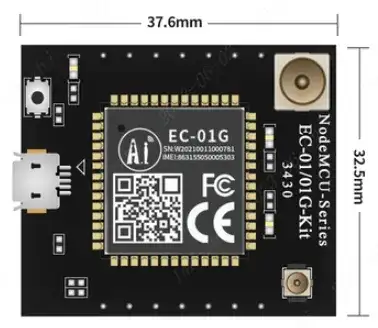
模塊尺寸:
控制方式:SPI
三、移植過程
我們的目標(biāo)是在立創(chuàng)·CW32F030C8T6開發(fā)板上能夠獲取到定位信息的功能。首先要獲取資料,查看數(shù)據(jù)手冊應(yīng)如何實(shí)現(xiàn),再移植至我們的工程。
3.1查看資料
注:在主電源斷開后,后備電池可以維持半小時(shí)左右的GPS星歷數(shù)據(jù)的保存,以支持溫啟動或熱啟動,從而實(shí)現(xiàn)快速定位。
首次定位時(shí)間較長,請確保是在室外進(jìn)行定位。
3.2引腳選擇
想要使用uart串口,需要確定使用的引腳是否有串口外設(shè)功能,可以通過用戶手冊進(jìn)行查看。在用戶手冊的第146頁。
這里選擇使用PA2和PA3的附加串口2功能。

有串口功能的引腳
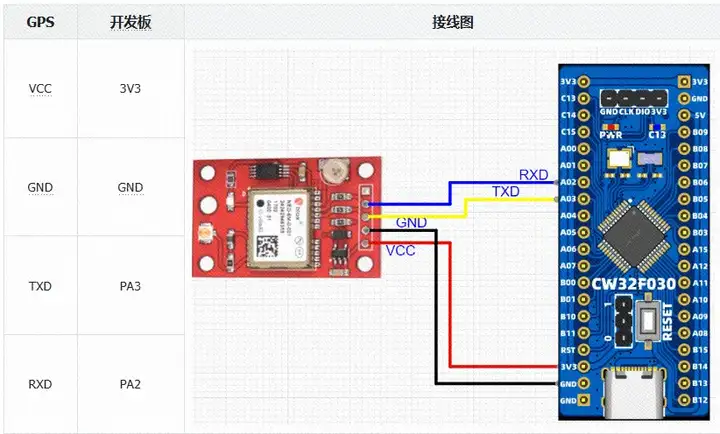
模塊接線圖
3.3移植至工程
移植步驟中的導(dǎo)入.c和.h文件與【CW32模塊使用】DHT11溫濕度傳感器相同,只是將.c和.h文件更改為bsp_gps.c與bsp_gps.h。這里不再過多講述,移植完成后面修改相關(guān)代碼。
在文件bsp_gps.c中,編寫如下代碼。
/* * Change Logs: * Date Author Notes * 2024-06-21 LCKFB-LP first version */ #include "bsp_gps.h" #include "stdio.h" #include "stdlib.h" #include "string.h" #define GPSRX_LEN_MAX 255 unsigned char GPSRX_BUFF[GPSRX_LEN_MAX]; unsigned char GPSRX_LEN = 0; _SaveData Save_Data; /****************************************************************** * 函 數(shù) 名 稱:GPS_GPIO_Init * 函 數(shù) 說 明:GPS引腳初始化 * 函 數(shù) 形 參:band_rate GPS通信波特率 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:默認(rèn)波特率為9600 ******************************************************************/ void GPS_GPIO_Init(uint32_t band_rate) { GPIO_InitTypeDef GPIO_InitStruct; // GPIO初始化結(jié)構(gòu)體 BSP_GPS_GPIO_RCC_ENABLE(); // 使能GPIO時(shí)鐘 BSP_GPS_UART_RCC_ENABLE(); // 使能UART時(shí)鐘 GPIO_InitStruct.Pins = BSP_GPS_TX_PIN; // GPIO引腳 GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽輸出 GPIO_InitStruct.Speed = GPIO_SPEED_HIGH; // 輸出速度高 GPIO_Init(BSP_GPS_GPIO_PORT, &GPIO_InitStruct); // 初始化 GPIO_InitStruct.Pins = BSP_GPS_RX_PIN; // GPIO引腳 GPIO_InitStruct.Mode = GPIO_MODE_INPUT_PULLUP; // 上拉輸入 GPIO_Init(BSP_GPS_GPIO_PORT, &GPIO_InitStruct); // 初始化 BSP_GPS_AF_UART_TX(); // UART_TX復(fù)用 BSP_GPS_AF_UART_RX(); // UART_RX復(fù)用 // 配置UART USART_InitTypeDef USART_InitStructure; USART_InitStructure.USART_BaudRate = band_rate; // 波特率 USART_InitStructure.USART_Over = USART_Over_16; // 配置USART的過采樣率。 USART_InitStructure.USART_Source = USART_Source_PCLK; // 設(shè)置時(shí)鐘源 USART_InitStructure.USART_UclkFreq = 64000000; //設(shè)置USART時(shí)鐘頻率(和主頻一致即可) USART_InitStructure.USART_StartBit = USART_StartBit_FE; //RXD下降沿開始 USART_InitStructure.USART_StopBits = USART_StopBits_1; // 停止位1 USART_InitStructure.USART_Parity = USART_Parity_No ; // 不使用校驗(yàn) USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 不使用流控 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 收發(fā)模式 USART_Init(BSP_GPS_USART, &USART_InitStructure); // 初始化串口2 // 優(yōu)先級,無優(yōu)先級分組 NVIC_SetPriority(BSP_GPS_IRQn, 0); // UARTx中斷使能 NVIC_EnableIRQ(BSP_GPS_IRQn); // 使能UARTx RC中斷 USART_ITConfig(BSP_GPS_USART, USART_IT_RC, ENABLE); } /****************************************************************** * 函 數(shù) 名 稱:GPS_Send_Bit * 函 數(shù) 說 明:向GPS發(fā)送單個(gè)字符 * 函 數(shù) 形 參:ch發(fā)送的字符 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void GPS_Send_Bit(unsigned char ch) { // 發(fā)送一個(gè)字節(jié) USART_SendData_8bit(BSP_GPS_USART, (uint8_t)ch); // 等待發(fā)送完成 while( RESET == USART_GetFlagStatus(BSP_GPS_USART, USART_FLAG_TXE) ){} } /****************************************************************** * 函 數(shù) 名 稱:GPS_send_String * 函 數(shù) 說 明:GPS發(fā)送字符串 * 函 數(shù) 形 參:str要發(fā)送的字符串 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void GPS_send_String(unsigned char *str) { while( str && *str ) // 地址為空或者值為空跳出 { GPS_Send_Bit(*str++); } } /****************************************************************** * 函 數(shù) 名 稱:Hand * 函 數(shù) 說 明:在GPS數(shù)據(jù)中,識別是否有想要的串口命令 * 函 數(shù) 形 參:需要識別的命令 * 函 數(shù) 返 回:1識別成功 0識別失敗 * 作 者:LC * 備 注:無 ******************************************************************/ uint8_t Hand(char *a) { if(strstr((const char*)GPSRX_BUFF,a)!=NULL) return 1; else return 0; } /****************************************************************** * 函 數(shù) 名 稱:CLR_Buf * 函 數(shù) 說 明:清除串口接收的數(shù)據(jù) * 函 數(shù) 形 參:無 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void CLR_Buf(void) { memset(GPSRX_BUFF, 0, GPSRX_LEN_MAX); //清空 GPSRX_LEN = 0; } /****************************************************************** * 函 數(shù) 名 稱:clrStruct * 函 數(shù) 說 明:清除GPS結(jié)構(gòu)體數(shù)據(jù) * 函 數(shù) 形 參:無 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void clrStruct(void) { Save_Data.isGetData = 0; Save_Data.isParseData = 0; Save_Data.isUsefull = 0; memset(Save_Data.GPS_Buffer, 0, GPS_Buffer_Length); //清空 memset(Save_Data.UTCTime, 0, UTCTime_Length); memset(Save_Data.latitude, 0, latitude_Length); memset(Save_Data.N_S, 0, N_S_Length); memset(Save_Data.longitude, 0, longitude_Length); memset(Save_Data.E_W, 0, E_W_Length); } /****************************************************************** * 函 數(shù) 名 稱:BSP_GPS_IRQHandler * 函 數(shù) 說 明:串口中斷服務(wù)函數(shù) * 函 數(shù) 形 參:無 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void BSP_GPS_IRQHandler(void) { uint8_t Res; if(USART_GetITStatus(BSP_GPS_USART,USART_IT_RC) != RESET) // 接收緩沖區(qū)不為空 { Res = USART_ReceiveData(BSP_GPS_USART); if(Res == '$') { GPSRX_LEN = 0; } GPSRX_BUFF[GPSRX_LEN++] = Res; if(GPSRX_BUFF[0] == '$' && GPSRX_BUFF[4] == 'M' && GPSRX_BUFF[5] == 'C')//確定是否收到"GPRMC/GNRMC"這一幀數(shù)據(jù) { if(Res == 'n') { memset(Save_Data.GPS_Buffer, 0, GPS_Buffer_Length); //清空 memcpy(Save_Data.GPS_Buffer, GPSRX_BUFF, GPSRX_LEN); //保存數(shù)據(jù) Save_Data.isGetData = 1; GPSRX_LEN = 0; memset(GPSRX_BUFF, 0, GPSRX_LEN_MAX); //清空 } } if(GPSRX_LEN >= GPSRX_LEN_MAX) { GPSRX_LEN = GPSRX_LEN_MAX; } } USART_ClearITPendingBit(BSP_GPS_USART, USART_IT_RC); //已經(jīng)處理就清楚標(biāo)志位 }
在文件bsp_gps.h中,編寫如下代碼。
/* * Change Logs: * Date Author Notes * 2024-06-21 LCKFB-LP first version */ #ifndef _BSP_GPS_H #define _BSP_GPS_H #include "board.h" #define BSP_GPS_GPIO_RCC_ENABLE() __RCC_GPIOA_CLK_ENABLE() // 串口TX的端口時(shí)鐘 #define BSP_GPS_UART_RCC_ENABLE() __RCC_UART2_CLK_ENABLE() // 串口2的時(shí)鐘 #define BSP_GPS_AF_UART_TX() PA02_AFx_UART2TXD() // GPIO的引腳復(fù)用 #define BSP_GPS_AF_UART_RX() PA03_AFx_UART2RXD() // GPIO的引腳復(fù)用 #define BSP_GPS_GPIO_PORT CW_GPIOA // 串口TX的端口 #define BSP_GPS_TX_PIN GPIO_PIN_2 // 串口TX的引腳 #define BSP_GPS_RX_PIN GPIO_PIN_3 // 串口RX的引腳 #define BSP_GPS_USART CW_UART2 // 串口2 #define BSP_GPS_IRQn UART2_IRQn #define BSP_GPS_IRQHandler UART2_IRQHandler //定義數(shù)組長度 #define GPS_Buffer_Length 80 #define UTCTime_Length 11 #define latitude_Length 11 #define N_S_Length 2 #define longitude_Length 12 #define E_W_Length 2 typedef struct SaveData { char GPS_Buffer[GPS_Buffer_Length]; char isGetData; //是否獲取到GPS數(shù)據(jù) char isParseData; //是否解析完成 char UTCTime[UTCTime_Length]; //UTC時(shí)間 char latitude[latitude_Length]; //緯度 char N_S[N_S_Length]; //N/S char longitude[longitude_Length]; //經(jīng)度 char E_W[E_W_Length]; //E/W char isUsefull; //定位信息是否有效 } _SaveData; extern _SaveData Save_Data; void GPS_GPIO_Init(uint32_t band_rate); void CLR_Buf(void); uint8_t Hand(char *a); void clrStruct(void); #endif
四、移植驗(yàn)證
在自己工程中的main主函數(shù)中,編寫如下。
/* * Change Logs: * Date Author Notes * 2024-06-21 LCKFB-LP first version */ #include "board.h" #include "stdio.h" #include "bsp_uart.h" #include "bsp_gps.h" void parseGpsBuffer(void); void printGpsBuffer(void); int32_t main(void) { board_init(); uart1_init(115200U); GPS_GPIO_Init(9600U); clrStruct(); printf("startrn"); while(1) { parseGpsBuffer(); printGpsBuffer(); } } /****************************************************************** * 函 數(shù) 名 稱:errorLog * 函 數(shù) 說 明:錯(cuò)誤日志打印 * 函 數(shù) 形 參:num 要輸出的錯(cuò)誤碼 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void errorLog(int num) { while (1) { printf("ERROR%drn",num); } } /****************************************************************** * 函 數(shù) 名 稱:parseGpsBuffer * 函 數(shù) 說 明:解析GPS發(fā)送過來的數(shù)據(jù) * 函 數(shù) 形 參:無 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void parseGpsBuffer(void) { char *subString; char *subStringNext; char i = 0; if (Save_Data.isGetData) { Save_Data.isGetData = 0; printf("**************rn"); printf("%srn",Save_Data.GPS_Buffer); for (i = 0 ; i <= 6 ; i++) { if (i == 0) { if ((subString = strstr(Save_Data.GPS_Buffer, ",")) == NULL) errorLog(1); //解析錯(cuò)誤 } else { subString++; if ((subStringNext = strstr(subString, ",")) != NULL) { char usefullBuffer[2]; switch(i) { case 1:memcpy(Save_Data.UTCTime, subString, subStringNext - subString);break; //獲取UTC時(shí)間 case 2:memcpy(usefullBuffer, subString, subStringNext - subString);break; //獲取UTC時(shí)間 case 3:memcpy(Save_Data.latitude, subString, subStringNext - subString);break; //獲取緯度信息 case 4:memcpy(Save_Data.N_S, subString, subStringNext - subString);break; //獲取N/S case 5:memcpy(Save_Data.longitude, subString, subStringNext - subString);break; //獲取經(jīng)度信息 case 6:memcpy(Save_Data.E_W, subString, subStringNext - subString);break; //獲取E/W default:break; } subString = subStringNext; Save_Data.isParseData = 1; if(usefullBuffer[0] == 'A') Save_Data.isUsefull = 1; else if(usefullBuffer[0] == 'V') Save_Data.isUsefull = 0; } else { errorLog(2); //解析錯(cuò)誤 } } } } } /****************************************************************** * 函 數(shù) 名 稱:printGpsBuffer * 函 數(shù) 說 明:輸出解析后的數(shù)據(jù) * 函 數(shù) 形 參:無 * 函 數(shù) 返 回:無 * 作 者:LC * 備 注:無 ******************************************************************/ void printGpsBuffer(void) { // uint8_t buff[100]={0}; if (Save_Data.isParseData) { Save_Data.isParseData = 0; //在廣東深圳進(jìn)行測量,發(fā)現(xiàn)UTC時(shí)間存在8小時(shí)誤差 printf("Save_Data.UTCTime = "); printf("%s",Save_Data.UTCTime); printf("rn"); if(Save_Data.isUsefull) { Save_Data.isUsefull = 0; //串口顯示緯度 printf("Save_Data.latitude = "); printf("%s",Save_Data.latitude); //串口顯示 printf("Save_Data.N_S = "); printf("%srn",Save_Data.N_S); //串口顯示經(jīng)度 printf("Save_Data.longitude = "); printf("%s",Save_Data.longitude); printf("rn"); //串口顯示 printf("Save_Data.E_W = "); printf("%s",Save_Data.E_W); printf("rn"); } else { printf("GPS DATA is not usefull!rn"); } } }
移植現(xiàn)象:
注意室內(nèi)大概率無法定位,所以最好外接屏幕去空曠地帶測試!
模塊移植成功案例代碼:
鏈接:https://pan.baidu.com/s/1Zqe1B8ncdZA2cpboYM-kgA?pwd=LCKF
提取碼:LCKF
審核編輯 黃宇
-
GPS模塊
+關(guān)注
關(guān)注
0文章
89瀏覽量
16503 -
CW32
+關(guān)注
關(guān)注
1文章
218瀏覽量
706
發(fā)布評論請先 登錄
相關(guān)推薦
轉(zhuǎn):GPS模塊NEO-7M_GPS-SDCard
ATK-NEO-6M GPS數(shù)據(jù)不能獲取
請問ATK-NEO-6M GPS模塊怎么用51單片機(jī)設(shè)計(jì)?
請問有用51單片機(jī)上利用ATK-NEO-6M GPS模塊設(shè)計(jì)出GPS的資料嗎?
ublox的GPS芯片選型
GPS有源天線能否在“ATK-RM04 WIFI模塊”中使用?
分享一個(gè)不錯(cuò)的ATK-NEO-6M GPS模塊實(shí)驗(yàn)
求助,如何連接ESP32 Devkit V1與AS608指紋傳感器、NEO-6M gps模塊和SIM-900A模塊?
ATK-NEO-6M GPS模塊使用說明(探索者F4)_AN14
GPS全球定位模塊資料,型號NEO-6M 包含F(xiàn)1/F4配套例程
關(guān)于Arduino Mega與NEO 6M GPS模塊接口的教程

cw32和stm32的區(qū)別

CW32模塊使用 EC-01G NBIOT+GPS模塊





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論