 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
我發(fā)現(xiàn)沒有關(guān)于 Arduino Mega 與 NEO-6M GPS 模塊接口的教程,所以我決定制作一個。希望你喜歡!
所需組件
硬件
- Arduino 超級 ==> 30 美元
- Neo-6M GPS 模塊 ==> $30
軟件
- Arduino IDE
該項目的總成本為60美元。
全球定位系統(tǒng)信息
什么是全球定位系統(tǒng)?
全球定位系統(tǒng) (GPS) 是一種基于衛(wèi)星的導(dǎo)航系統(tǒng),由至少 24 顆衛(wèi)星組成。GPS 全天 24 小時在任何天氣條件下工作,在世界任何地方工作,無需訂閱費或設(shè)置費。
GPS的工作原理
GPS 衛(wèi)星在精確的軌道上每天繞地球兩次。每顆衛(wèi)星都傳輸獨特的信號和軌道參數(shù),使 GPS 設(shè)備能夠解碼和計算衛(wèi)星的精確位置。GPS 接收器使用此信息和三邊測量來計算用戶的確切位置。本質(zhì)上,GPS 接收器通過接收發(fā)射信號所需的時間量來測量到每顆衛(wèi)星的距離。通過更多衛(wèi)星的距離測量,接收器可以確定用戶的位置并顯示它。
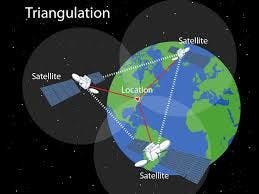
要計算您的二維位置(緯度和經(jīng)度)并跟蹤運動,GPS 接收器必須鎖定至少 3 顆衛(wèi)星的信號。通過 4 顆或更多衛(wèi)星,接收器可以確定您的 3-D 位置(緯度、經(jīng)度和高度)。通常,GPS 接收器將跟蹤 8 顆或更多衛(wèi)星,但這取決于一天中的時間和您在地球上的位置。確定您的位置后,GPS 單元可以計算其他信息,例如
- 速度
- 軸承
- 追蹤
- 行程范圍
- 到目的地的距離
什么是信號
GPS 衛(wèi)星至少傳輸 2 個低功率無線電信號。信號通過視線傳播,這意味著它們將穿過云層、玻璃和塑料,但不會穿過大多數(shù)固體物體,例如建筑物和山脈。然而,現(xiàn)代接收器更敏感,通常可以跟蹤房屋。GPS 信號包含 3 種不同類型的信息
- 偽隨機(jī)碼
它是一個 ID 代碼,用于識別正在傳輸信息的衛(wèi)星。您可以在設(shè)備的衛(wèi)星頁面上查看從哪些衛(wèi)星接收信號。
- 星歷數(shù)據(jù)
需要星歷數(shù)據(jù)來確定衛(wèi)星的位置,并提供有關(guān)衛(wèi)星健康狀況、當(dāng)前日期和時間的重要信息。
- 年歷數(shù)據(jù)
年歷數(shù)據(jù)告訴 GPS 接收器,每顆 GPS 衛(wèi)星在一天中的任何時間都應(yīng)該在哪里,并顯示該衛(wèi)星和系統(tǒng)中所有其他衛(wèi)星的軌道信息。
Neo-6M GPS模塊
NEO-6M GPS模塊如下圖所示。它帶有一個外部天線,不帶有插頭引腳。所以你需要焊接它。
?

NEO-6M GPS模塊概述
- NEO-6M GPS芯片
該模塊的核心是 u-blox 的 NEO-6M GPS 芯片。它可以在 50 個通道上跟蹤多達(dá) 22 顆衛(wèi)星,并達(dá)到業(yè)界最高水平的靈敏度,即 -161 dB 跟蹤,同時僅消耗 45mA 電源電流。u-blox 6 定位引擎還擁有不到 1 秒的首次定位時間 (TTFF)。該芯片提供的最佳功能之一是省電模式 (PSM)。它可以通過選擇性地打開和關(guān)閉接收器的某些部分來降低系統(tǒng)功耗。這將模塊的功耗顯著降低至僅 11mA,使其適用于 GPS 手表等對功率敏感的應(yīng)用。NEO-6M GPS 芯片的必要數(shù)據(jù)引腳被拆分為“0.1” 間距接頭。這包括通過 UART 與微控制器通信所需的引腳。
注意:- 模塊支持波特率從 4800bps 到 230400bps,默認(rèn)波特率為 9600。

位置固定 LED 指示燈
NEO-6M GPS 模塊上有一個 LED,用于指示定位狀態(tài)。它會根據(jù)它所處的狀態(tài)以不同的速率閃爍
- No Blinking ==> 表示正在搜索衛(wèi)星
- 每 1 秒閃爍一次- 表示已找到定位

- 3.3V LDO 穩(wěn)壓器
NEO-6M 芯片的工作電壓為 2.7 至 3.6V。但是,該模塊配備了MICREL的MIC5205超低壓差3V3穩(wěn)壓器。邏輯引腳也可以承受 5 伏電壓,因此我們可以輕松地將其連接到 Arduino 或任何 5V 邏輯微控制器,而無需使用任何邏輯電平轉(zhuǎn)換器。

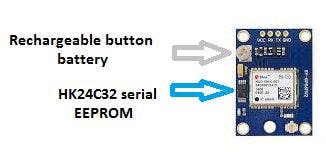
電池和 EEPROM
該模塊配備一個 HK24C32 兩線串行 EEPROM。它大小為4KB,通過I2C連接到NEO-6M芯片。模塊還包含一個可充電紐扣電池,用作超級電容器。
EEPROM 與電池一起有助于保留電池支持的 RAM (BBR)。BBR 包含時鐘數(shù)據(jù)、最新位置數(shù)據(jù)(GNSS 或位數(shù)據(jù))和模塊配置。但它并不意味著永久數(shù)據(jù)存儲。
由于電池保留時鐘和最后位置,首次定位時間 (TTFF) 顯著減少到 1 秒。這允許更快的位置鎖定。
如果沒有電池,GPS 總是冷啟動,因此初始 GPS 鎖定需要更多時間。通電時電池會自動充電,并且可以在沒有電源的情況下保持?jǐn)?shù)據(jù)長達(dá)兩周。
?
引腳排列
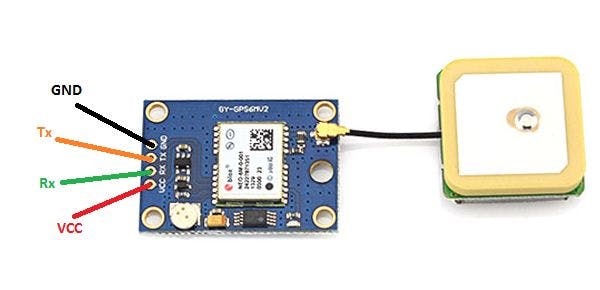
- GND 是接地引腳,需要連接到 Arduino 上的 GND 引腳。
- TxD(發(fā)送器)引腳用于串行通信。
- RxD(接收器)引腳用于串行通信。
- VCC 為模塊供電。您可以直接將其連接到 Arduino 上的 5V 引腳。
阿杜諾兆
Arduino 是一個基于易于使用的硬件和軟件的開源電子平臺。Arduino 板能夠讀取輸入——傳感器上的光、按鈕上的手指或 Twitter 消息——并將其轉(zhuǎn)換為輸出——激活電機(jī)、打開 LED、在線發(fā)布內(nèi)容。您可以通過向板上的微控制器發(fā)送一組指令來告訴您的板該做什么。為此,您需要使用 Arduino 編程語言(基于 Wiring)和基于 Processing 的 Arduino 軟件 (IDE)。
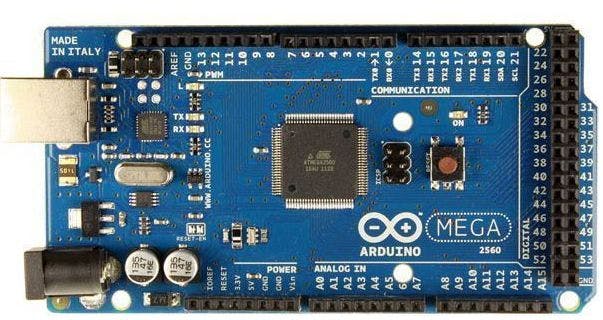
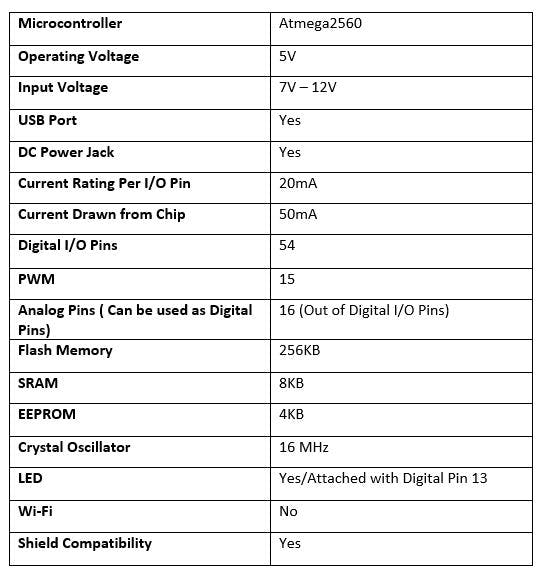
Arduino Mega 2560 是基于 Atmega2560 的微控制器板。
- 板上集成了 54 個數(shù)字 I/O 引腳和 16 個模擬引腳,這使得該設(shè)備獨一無二并與眾不同。在 54 個數(shù)字 I/O 中,15 個用于 PWM(脈沖寬度調(diào)制)。
- 16MHz頻率的晶體振蕩器。
- 該板帶有 USB 電纜端口,用于將代碼從計算機(jī)連接和傳輸?shù)桨濉?
- 直流電源插孔與用于為電路板供電的電路板耦合。
- 該板帶有兩個電壓調(diào)節(jié)器,即 5V 和 3.3V,可根據(jù)要求靈活調(diào)節(jié)電壓。
- 有一個復(fù)位按鈕和 4 個稱為 USART 的硬件串行端口,可產(chǎn)生最大的通信設(shè)置速度。
- 有三種方式為電路板供電。您可以使用 USB 電纜為電路板供電并將代碼傳輸?shù)诫娐钒澹部梢允褂秒娐钒宓?Vin 或通過電源插孔或電池為其供電。
引腳排列
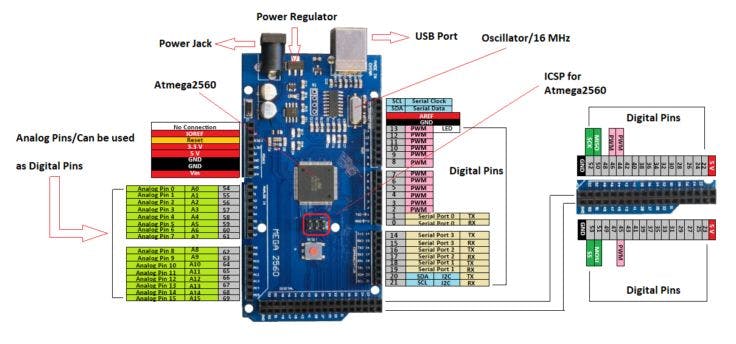
引腳說明
- 5V & 3.3V ==>此引腳用于提供 5V 左右的輸出穩(wěn)壓。該穩(wěn)壓電源為板上的控制器和其他組件供電。它可以從電路板的 Vin 或 USB 電纜或其他穩(wěn)壓 5V 電壓電源獲得。而另一個電壓調(diào)節(jié)由 3.3V 引腳提供。它可以消耗的最大功率為50mA。
- GND ==>板上有 5 個接地引腳,這在項目需要多個接地引腳時非常有用。
- 復(fù)位==> 此引腳用于復(fù)位電路板。將此引腳設(shè)置為低電平將重置電路板。
- Vin ==> 它是提供給電路板的輸入電壓,范圍從 7V 到 20V。電源插孔提供的電壓可通過此引腳訪問。但是,通過該引腳到電路板的輸出電壓將自動設(shè)置為 5V。
- 串行通信==> RXD 和 TXD 是用于發(fā)送和接收串行數(shù)據(jù)的串行引腳,即 Rx 表示數(shù)據(jù)的傳輸,而 Tx 用于接收數(shù)據(jù)。使用這些串行引腳的四種組合,其中串行 0 包含 RX(0) 和 TX(1),串行 1 包含 TX(18) 和 RX(19),串行 2 包含 TX(16) 和 RX(17),串行 3 包含 TX(14) 和 RX(15)。
- 外部中斷==> 六個引腳用于創(chuàng)建外部中斷,即中斷 0(0)、中斷 1(3)、中斷 2(21)、中斷 3(20)、中斷 4(19)、中斷 5(18)。這些引腳通過多種方式產(chǎn)生中斷,即提供低值、上升沿或下降沿或改變中斷引腳的值。
- LED ==> 該板帶有連接到數(shù)字引腳 13 的內(nèi)置 LED。該引腳的高值將打開 LED,低值將其關(guān)閉。
- AREF ==> AREF 代表模擬參考電壓,它是模擬輸入的參考電壓。
- 模擬引腳==> 板上有 16 個模擬引腳,標(biāo)記為 A0 到 A15。需要注意的是,所有這些模擬引腳都可以用作數(shù)字 I/O 引腳。每個模擬引腳都有 10 位分辨率。這些引腳可以測量從地到 5V 的電壓。但是,可以使用 AREF 和analogReference() 函數(shù)更改上限值。
- I2C ==> 20 和 21 兩個引腳支持 I2C 通信,其中 20 代表 SDA(串行數(shù)據(jù)線,主要用于保存數(shù)據(jù)),21 代表 SCL(串行時鐘線,主要用于提供設(shè)備之間的數(shù)據(jù)同步)
- SPI 通信==> SPI 代表串行外圍接口,用于在控制器和其他外圍組件之間傳輸數(shù)據(jù)。四個引腳即 50 (MISO)、51 (MOSI)、52 (SCK)、53 (SS) 用于 SPI 通信。
Arduino IDE
在這里,我假設(shè)您已經(jīng)安裝了 Arduino IDE。
1.下載下面給出的所需庫
2.下載后。解壓縮并將其移動到文件夾 C:\Users\...\Documents\Arduino\libraries 確保沒有 (-)。

3. 打開 Arduino IDE 并從程序部分復(fù)制代碼。
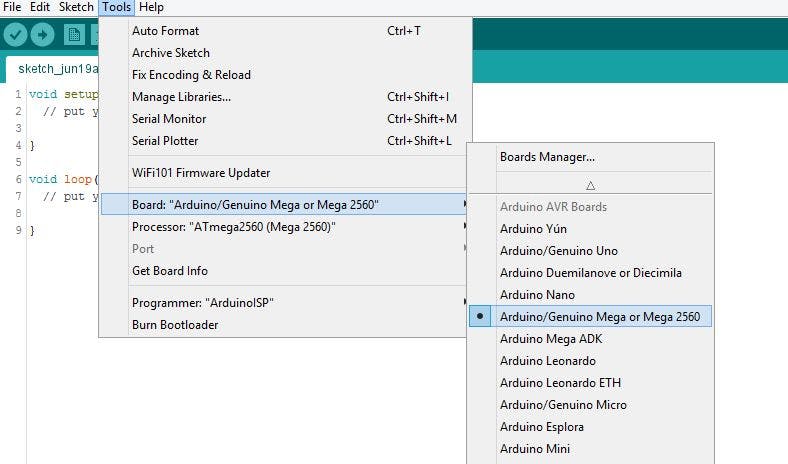
4. 然后選擇板子去工具 ==> 板子 ==> 在這里選擇板子,我們使用的是 Arduino Mega 2560。
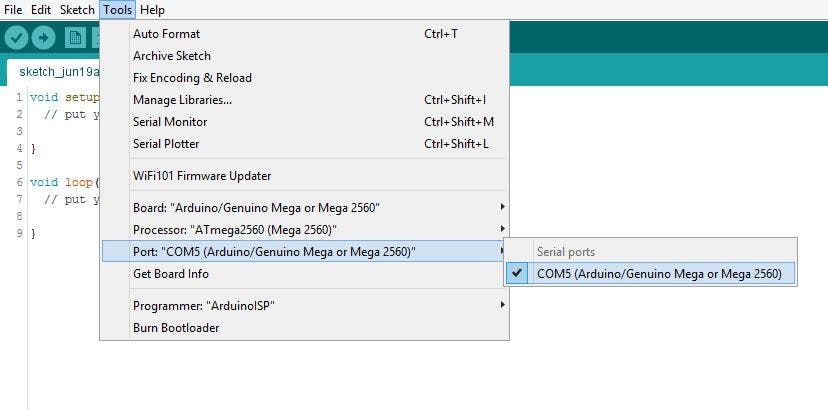
5. 選擇板選擇端口后,轉(zhuǎn)到工具 ==> 端口。
?
6. 選擇板子和端口后點擊上傳。
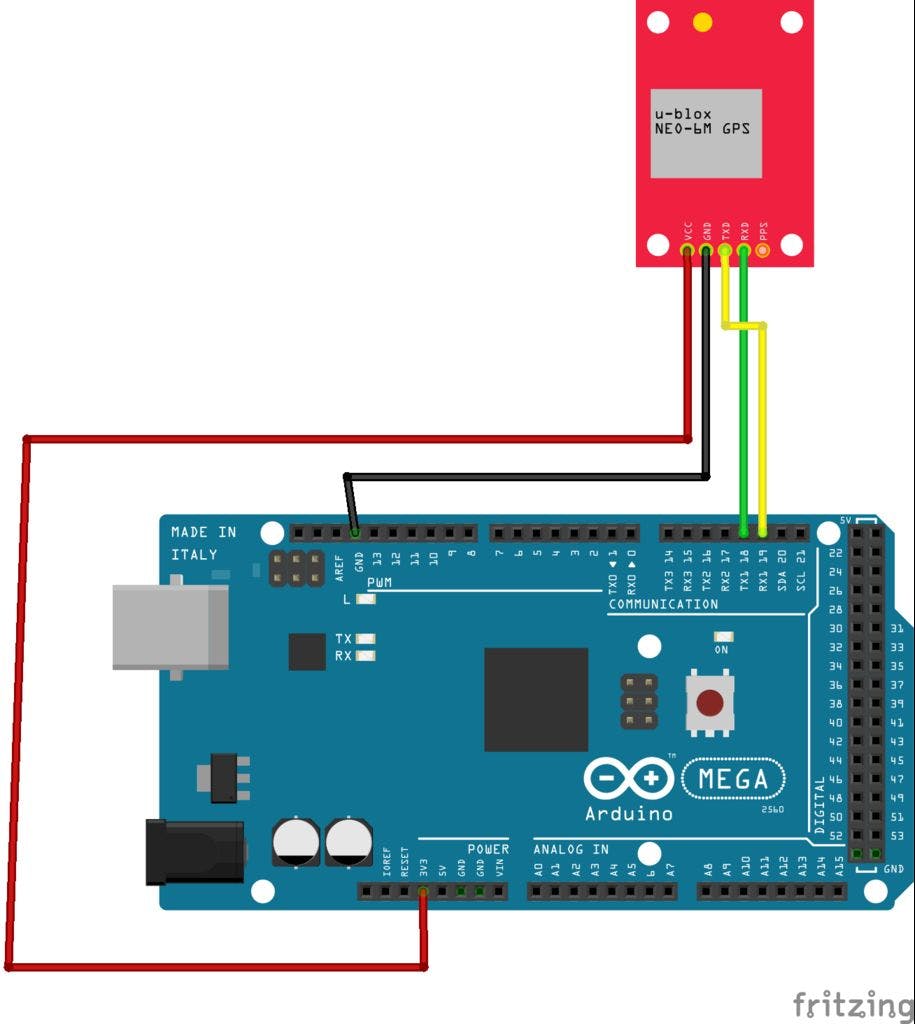
連接
Arduino MEGA ==> NEO-6M GPS
- 3.3V ==> VCC
- 接地 ==> 接地
- Tx1 (18) ==> 接收
- Rx1 (19) ==> Tx
您也可以使用 Serial2 或 Serial3 代替 Serial1
串行 2 針
- Tx2 (16) ==> 接收
- Rx2 (17) ==> 發(fā)送
串行 3 針
- Tx3 (14) ==> 接收
- Rx3 (15) ==> Tx
?
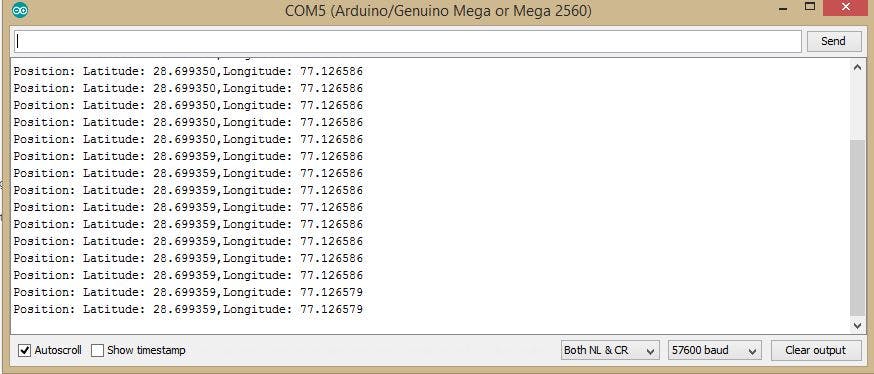
結(jié)果
?
?
?
- 使用Arduino UNO連接GPS模塊
- 如何將GPS模塊與Arduino連接
- Arduino RTK2 GPS模塊
- 采用USB接口的核心電路板Arduino Mega2560 0次下載
- 華晨GT3663臺灣6M帶寬通用軟件免費下載 18次下載
- NEO-7 u-blox獨立式GNSS模塊的數(shù)據(jù)手冊免費下載 41次下載
- GPS全球定位模塊資料,型號NEO-6M 包含F(xiàn)1/F4配套例程 77次下載
- Arduino Mega 2560原理圖 126次下載
- M8N資料整理+參考電路 440次下載
- ATK-NEO-6M GPS模塊使用說明(探索者F4)_AN14 63次下載
- GPS模塊硬件手冊NEO6 0次下載
- ATK-NEO-6M用戶手冊_V2.0 68次下載
- Arduino_Mega2560參數(shù) 0次下載
- NEO-6_u-blox_6_GPS_Modules_Data_Sheet 31次下載
- arduino-mega2560-原理圖 126次下載
- 博途案例:模塊更新與接口更改的實現(xiàn)方法 3157次閱讀
- 基于Arduino供電及使用GPS-6MV2模塊創(chuàng)建天文時鐘 3640次閱讀
- 如何理解GPS的周數(shù)翻轉(zhuǎn) 1.5w次閱讀
- dfrobotUSB/TTL樹莓派GPS模塊簡介 3425次閱讀
- dfrobotMega原型擴(kuò)展板 Arduino兼容簡介 1234次閱讀
- dfrobotMega擴(kuò)展板轉(zhuǎn)4路擴(kuò)展板布局簡介 1270次閱讀
- dfrobotBluno Mega1280控制器 Arduino兼容簡介 2290次閱讀
- dfrobotSIM808 GPS/GPRS/GSM擴(kuò)展板簡介 2209次閱讀
- dfrobot接口擴(kuò)展板簡介 1810次閱讀
- dfrobot內(nèi)置式GPS天線介紹 1932次閱讀
- 飛凌嵌入式北斗&GPS模塊介紹 3525次閱讀
- 自制Arduino Mega2560開發(fā)板電路圖和PCB 4.3w次閱讀
- 關(guān)于NanoPi-NEO-Core的介紹 5870次閱讀
- GPS定位技術(shù)中的GPS模塊 4249次閱讀
- mcu怎樣控制藍(lán)牙gps模塊? 2167次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數(shù)據(jù)手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風(fēng)口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發(fā)指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應(yīng)用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應(yīng)用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關(guān)電源設(shè)計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數(shù)字電路基礎(chǔ)pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅(qū)動電路設(shè)計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉(zhuǎn)中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學(xué)會AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論