") 安泰功率放大器應(yīng)用:驅(qū)動超聲波作動器
安泰功率放大器應(yīng)用:驅(qū)動超聲波作動器
機(jī)器人具有輪式、足式、蛇形、爬行、飛行、游動等豐富的運動形式(圖1)。在目前的研究中,機(jī)器人空中與水中的運動通常采用飛行與游動方式,陸上運動則以輪式、足式、蛇形、爬行等方式為主。相較于蛇形、爬行等復(fù)雜運動,輪式、足式和輪足式機(jī)器人的運動機(jī)理清晰,更便于機(jī)器人的設(shè)計與操控,相關(guān)研究成果也較為豐富。驅(qū)動腿足、腿輪可有效增加機(jī)器人牽引力和負(fù)載力,同時使機(jī)器人更加適應(yīng)崎嶇及不平坦路面環(huán)境。那么功率放大器能驅(qū)動超聲波作動器嗎?
▍“驅(qū)動器+腿足執(zhí)行器”vs超聲驅(qū)動行波作動器
傳統(tǒng)多足機(jī)器人以“驅(qū)動器+腿足執(zhí)行器”形成足結(jié)構(gòu),驅(qū)動足會增大機(jī)器人系統(tǒng)的體積,基于仿生運動實現(xiàn)多足協(xié)同運動的控制難度、系統(tǒng)集成難度和設(shè)計成本也隨之增大。
針對這一問題,受多足蟲“多足+爬行”運動方式的啟發(fā),山東大學(xué)智能無人系統(tǒng)教育部工程研究中心吳疆副研究員以超聲行波驅(qū)動為基礎(chǔ),研發(fā)了一種具有高負(fù)載和牽引能力的仿生超聲驅(qū)動行波作動器,該研究成果以 Development of a Self-Moving Ultrasonic Actuator With High Carrying/Towing Capability Driven by Longitudinal Traveling Wave 為題刊登在 IEEE/ASME TRANSACTIONS ON MECHATRONICS。
如圖2(a)所示,作動器振動體設(shè)計有多個仿蟲足矩形齒槽,以實現(xiàn)作動器構(gòu)型與運動仿生,圖2(b)與圖2(c)展示了作動器運動特點與仿生思路,其最終構(gòu)型如圖2(d)所示。作動器的尺寸長×寬×高為315mm×32mm×30mm,在頻率和峰值分別為27.8kHz和800V的交流電壓驅(qū)動下,負(fù)載能力可達(dá)6kg,是其自身重量的10.2倍,牽引能力可達(dá)24.5N,具有41.5N/kg的牽引力密度,運動性能優(yōu)于現(xiàn)階段多數(shù)研究成果。得益于“多足+爬行”仿生設(shè)計,作動器在一定程度上繼承了生物體對各種路面環(huán)境的適應(yīng)能力,可穿過30mm的“寬溝”,并在不同材質(zhì)的“路面”上展現(xiàn)出較為理想的運動性能。此外,作動器采用超聲縱向行波驅(qū)動,可在無負(fù)載時達(dá)到65.8mm/s的運動速度。

圖2超聲作動器的設(shè)計仿真與構(gòu)型視圖
▍為什么是縱向行波激勵?
超聲作動器振動傳播類型包括駐波和行波。通過激發(fā)彎振或縱振形成駐波同樣可達(dá)到驅(qū)動作動器沿一定軌跡運動的目的,這種方式在超聲作動器和超聲電機(jī)中經(jīng)常使用。圖3展示了駐波方式驅(qū)動的多種超聲電機(jī)與超聲作動器。然而在駐波振動下,模態(tài)簡并使得系統(tǒng)的高度和長度難以大幅度改變,振動體結(jié)構(gòu)復(fù)雜,在需要精確制造和安裝的場景下此方法極為受限。
以彎曲行波形成板狀超聲作動器是另一種常見的傳統(tǒng)作動器設(shè)計方法。相較于駐波,彎曲行波很容易在結(jié)構(gòu)中被激發(fā),但它們的機(jī)電耦合比縱向振動的行波作動器機(jī)電耦合弱,因此,采用夾持式換能器激勵的縱向行波作動器有利于實現(xiàn)良好的承載/牽引性能。
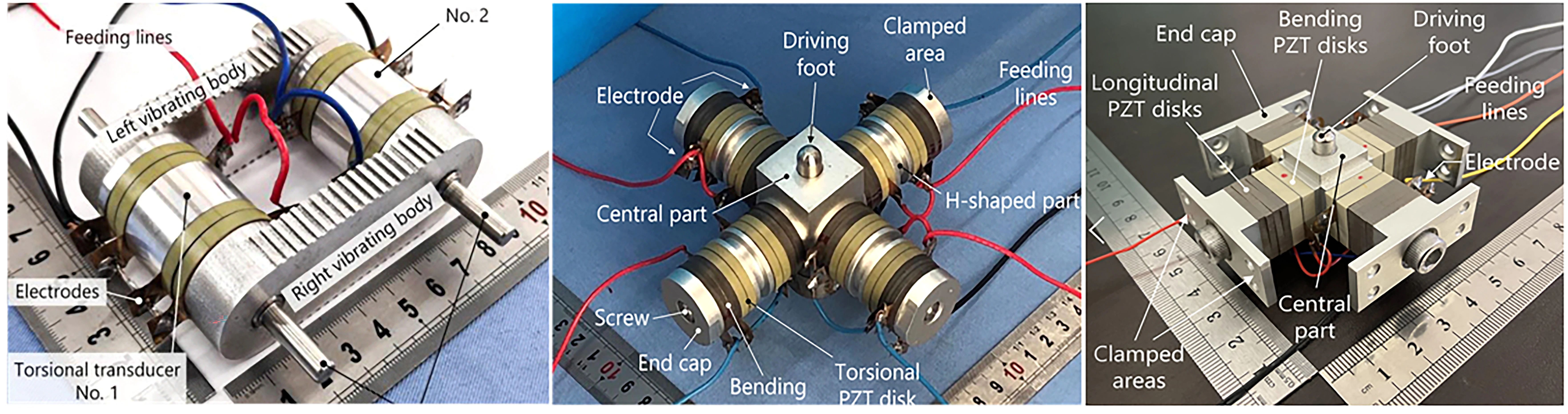
圖3駐波驅(qū)動的超聲電機(jī)與超聲作動器
▍行波驅(qū)動,多足協(xié)同
在縱向行波振動下,作動器中形成沿振動體方向并受兩端縱振換能器相位影響的“多足”協(xié)同爬行運動。在縱向行波影響下,每個“足端”作近似橢圓運動,其運動軌跡受結(jié)構(gòu)的影響并在軌跡趨向圓形時獲得更優(yōu)的承載/牽引能力。與此同時,“多足”在縱向行波影響下協(xié)同運動,可帶動作動器沿某個設(shè)定方向爬行。為了提高作動器的運動速度和負(fù)載性能,研究人員建立了如圖4所示的超聲作動器組端運動模型,最終實現(xiàn)作動器“行波驅(qū)動、多足協(xié)同”的仿生運動形態(tài)。
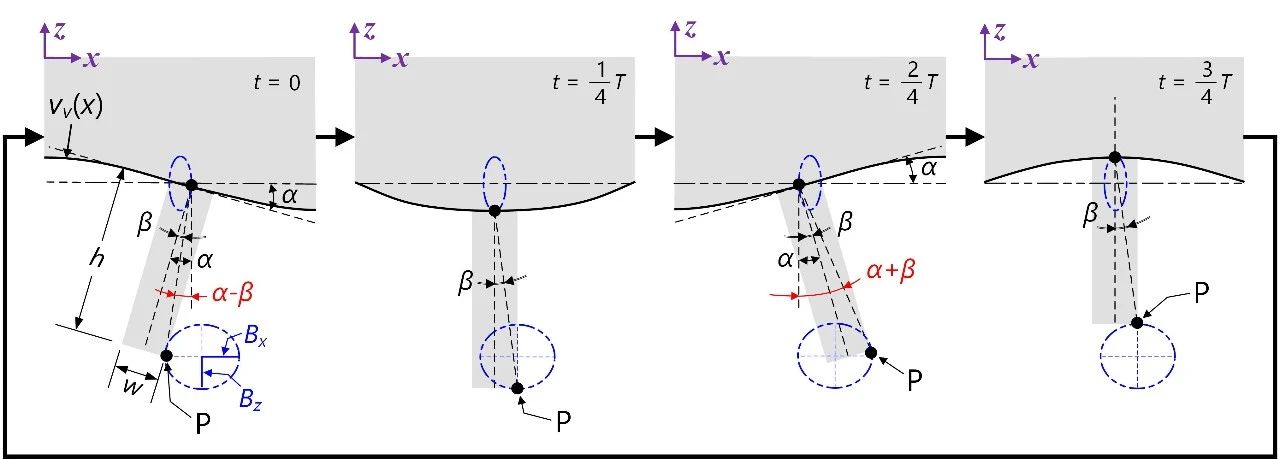
圖4超聲驅(qū)動行波作動器足端運動模型
圖5展示了超聲驅(qū)動行波作動器的運動過程。在作動器控制方面,超聲驅(qū)動行波作動器可通過調(diào)節(jié)頻率、相位設(shè)計與電壓,簡便地實現(xiàn)驅(qū)動器運動速度和運動方向的控制。
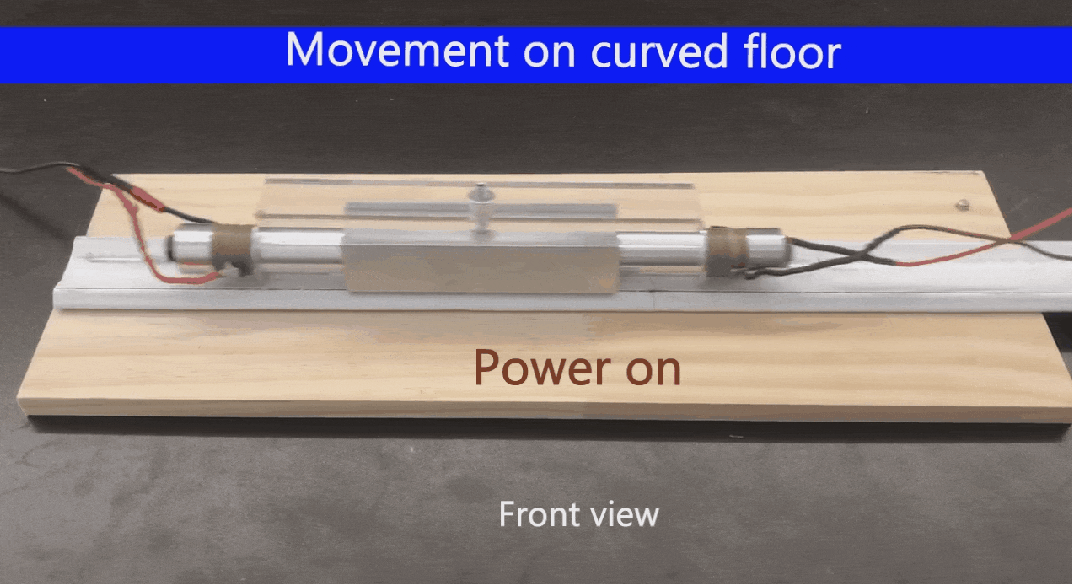
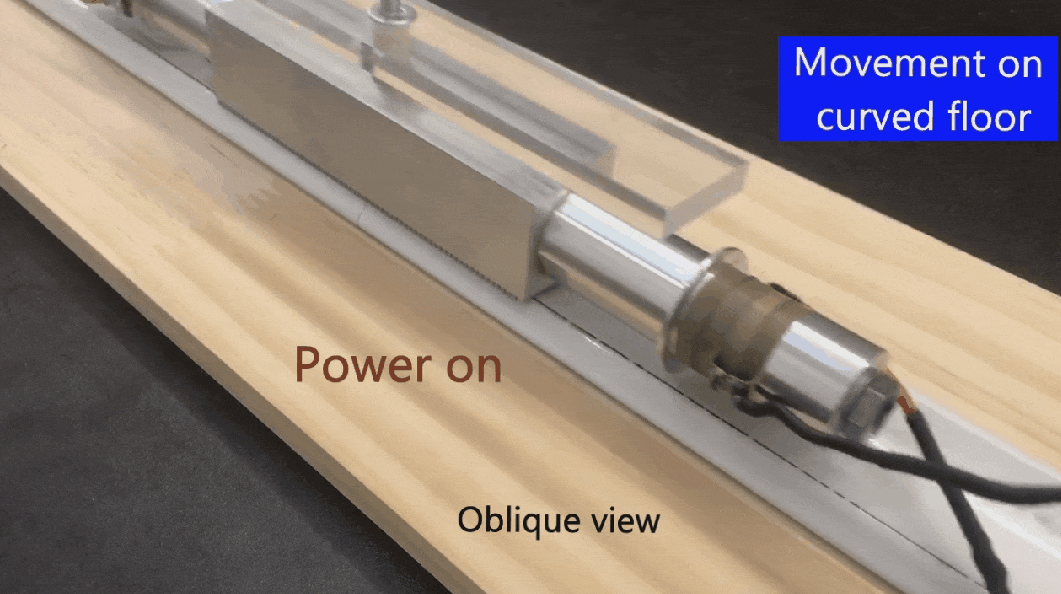
圖5超聲驅(qū)動行波作動器的運動過程
研究人員分別在木板和大理石材質(zhì)模擬的路況下,對作動器速度進(jìn)行了階躍響應(yīng)測試。如圖6所示,在測試條件下,作動器在2種材質(zhì)表面變現(xiàn)出的最大運動誤差不超過8%,體現(xiàn)了作動器良好的運動能力。
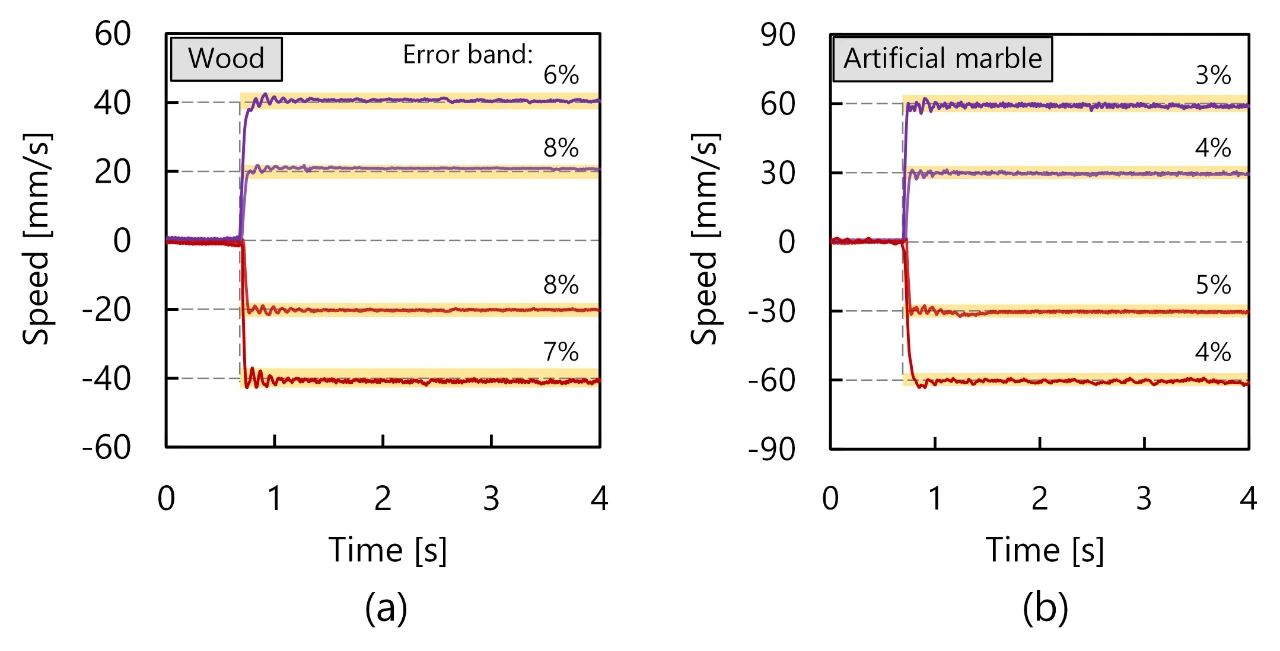
圖6超聲驅(qū)動行波作動器的速度階躍響應(yīng)曲線
圖7展示了作動器對0.5~1Hz頻率動態(tài)變化速度信號的跟蹤效果,跟蹤誤差不超過7%,體現(xiàn)了作動器良好的動態(tài)響應(yīng)能力。
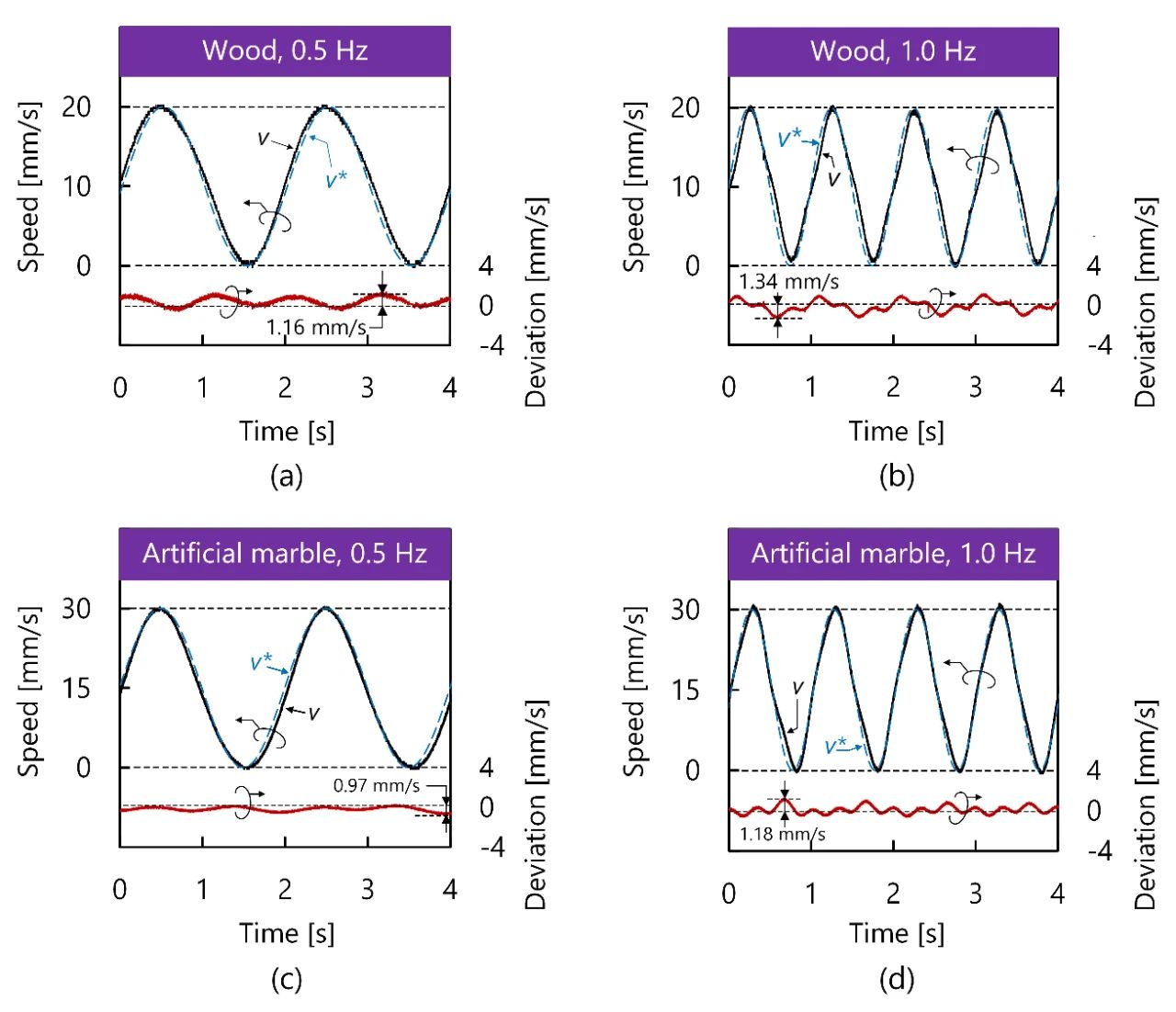
圖7超聲驅(qū)動行波作動器的速度動態(tài)響應(yīng)曲線
如圖8所示,由于多足結(jié)構(gòu)增加了作動器與地面的接觸“機(jī)會”,超聲驅(qū)動行波作動器可跨越30mm的距離,增加了作動器對復(fù)雜地面的適應(yīng)能力,拓展了作動器的應(yīng)用場景。
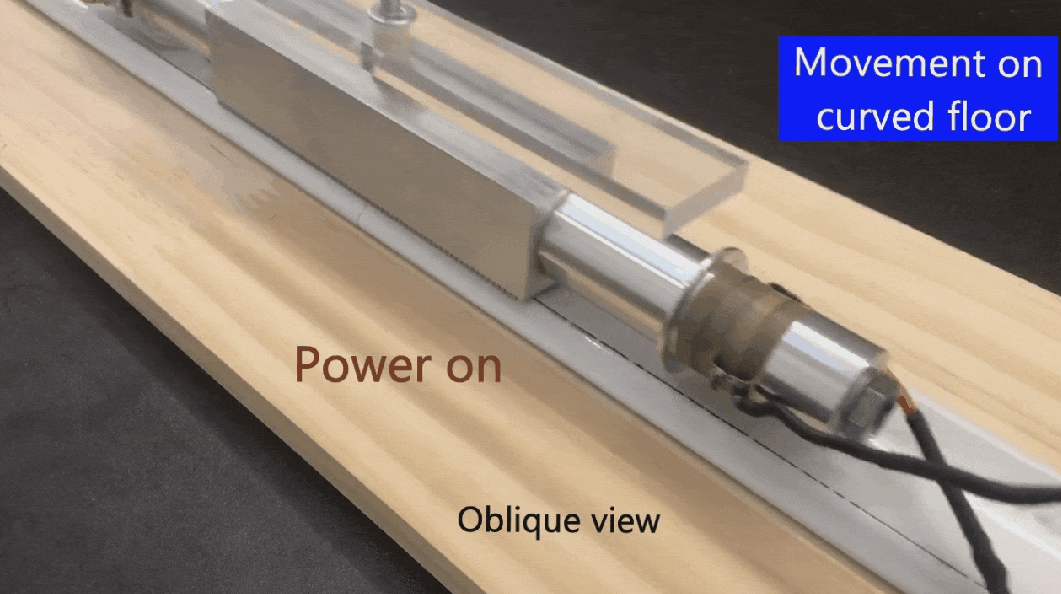
圖8超聲驅(qū)動行波作動器跨越寬溝的運動過程
ATA-68020功率放大器

ATA-68020是一款理想的單通道功率放大器。最大輸出850Vp-p(±425Vp)電壓,最大輸出電流2.12Ap,可與主流的信號發(fā)生器配套使用,實現(xiàn)信號的完美放大,同時它也是一款在超聲電機(jī)超聲制動器驅(qū)動中常用到的測試儀器儀表。
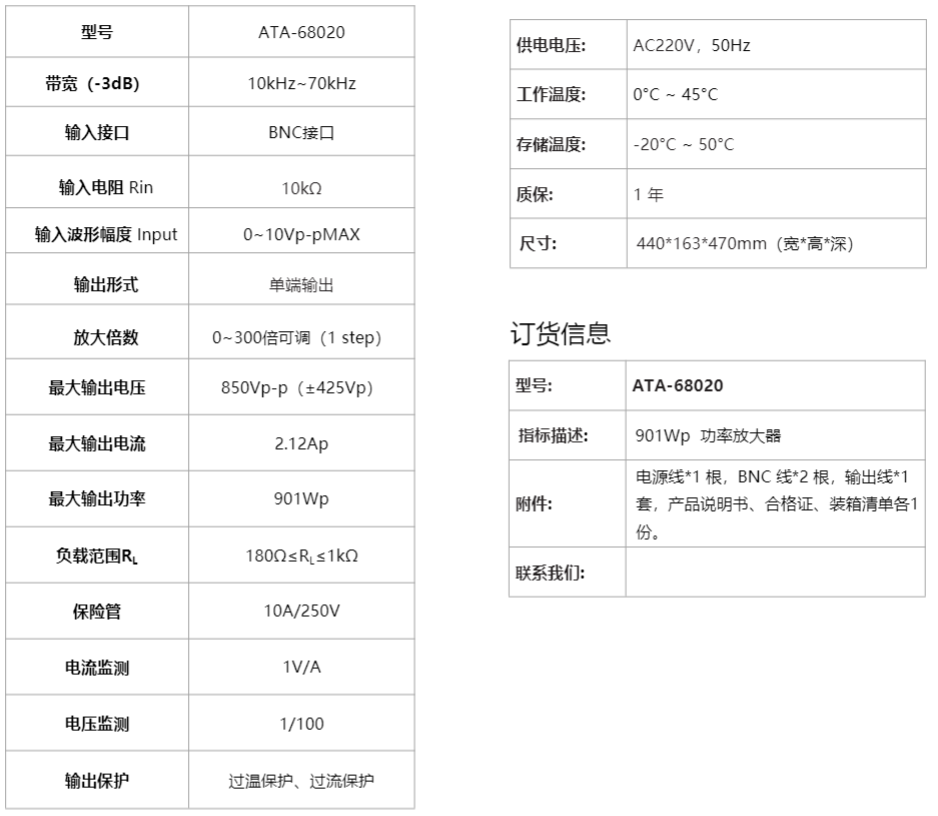
最大輸出電壓850Vp-p(±425Vp)
放大倍數(shù)0~300倍可調(diào),1倍步進(jìn)
輸入電阻10kΩ
單通道
與傳統(tǒng)“驅(qū)動器+執(zhí)行器”的足式結(jié)構(gòu)設(shè)計相比,超聲驅(qū)動作動器結(jié)構(gòu)簡單,易于控制,為仿生運動與結(jié)構(gòu)設(shè)計提供了新思路。但超聲驅(qū)動作動器離不開與之相匹配的高頻高壓供能與驅(qū)控系統(tǒng)的支持。因此,如何將直流電源、直流逆變電路、功放電路集成到超聲驅(qū)動作動器系統(tǒng)中,實現(xiàn)作動器機(jī)械系統(tǒng)與電氣系統(tǒng)的阻抗匹配,形成無線纜限制、大范圍可移動的超聲驅(qū)動作動器是未來具有重要意義的研究方向。功率放大器www.aigtek.com
審核編輯 黃宇
-
功率放大器
+關(guān)注
關(guān)注
102文章
3625瀏覽量
132160 -
超聲波
+關(guān)注
關(guān)注
63文章
3039瀏覽量
138564
發(fā)布評論請先 登錄
相關(guān)推薦
Aigtek:超聲波信號功率放大器的作用是什么
安泰功率放大器應(yīng)用:超聲波水下傳輸距離如何測算
安泰功率放大器應(yīng)用:超聲波換能器解析

安泰高電壓功率放大器在新能源領(lǐng)域超聲波噴涂技術(shù)中的應(yīng)用
Aigtek功率放大器如何驅(qū)動超聲換能器
安泰:功率放大器影響因素分析

安泰功率放大器如何驅(qū)動20kHz水聲換能器超聲驅(qū)魚

安泰功率放大器驅(qū)動壓電陶瓷的應(yīng)用領(lǐng)域有哪些
安泰功率放大器怎么使用

安泰電子超聲功率放大器能應(yīng)用在哪些行業(yè)中

ATA-3040C功率放大器在超聲測試中的應(yīng)用有哪些

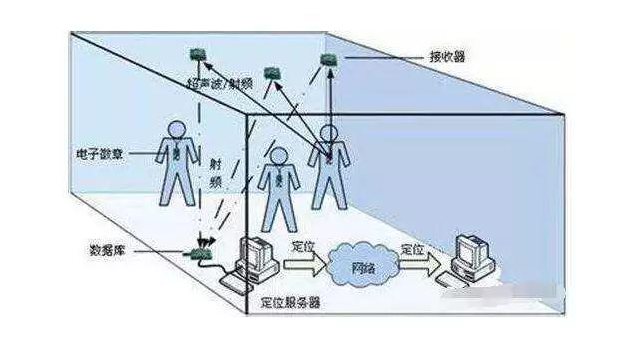
什么是超聲波定位技術(shù)?功率放大器在超聲波定位中有何應(yīng)用?
什么是超聲功率放大器?高頻超聲功率放大器好用嗎?
醫(yī)用超聲功率放大器,具體有哪些應(yīng)用場景?
關(guān)于工業(yè)用超聲功率放大器的這些應(yīng)用場景,你都知道嗎?
- 設(shè)計技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設(shè)計
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設(shè)計
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計資源
- 設(shè)計技術(shù)
- 電子百科
- 電子視頻
- 元器件知識
- 工具箱
- VIP會員
- 最新技術(shù)文章
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會
- 活動策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測驗
- 設(shè)計大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號手機(jī)智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論