 為什么自動駕駛中全球導航衛星系統如此重要?
為什么自動駕駛中全球導航衛星系統如此重要?
全球導航衛星系統(GNSS,Global Navigation Satellite System)作為實現高精度定位的核心技術之一,已經成為自動駕駛技術發展的重要支撐。隨著高級輔助駕駛技術的發展,定位識別的重要性不言而喻,高精度衛星定位在城市、鄉村、高速等各種場景的駕駛中的應用也愈發廣泛。而GNSS憑借其全天候、全球覆蓋、定位精度高的優勢,成為自動駕駛車輛進行位置識別和路徑跟蹤的重要技術保障。
GNSS技術概述與核心功能
GNSS由多個衛星導航系統組成,全球廣泛應用的美國全球定位系統(GPS)、中國北斗衛星導航系統(BDS)、俄羅斯的GLONASS系統以及歐洲的伽利略(Galileo)系統等均屬于GNSS。GNSS的核心功能是通過衛星信號向地面用戶提供精確的位置信息和時間數據,這些數據可用于車輛導航、授時和速度測量。
1.1GNSS的工作原理
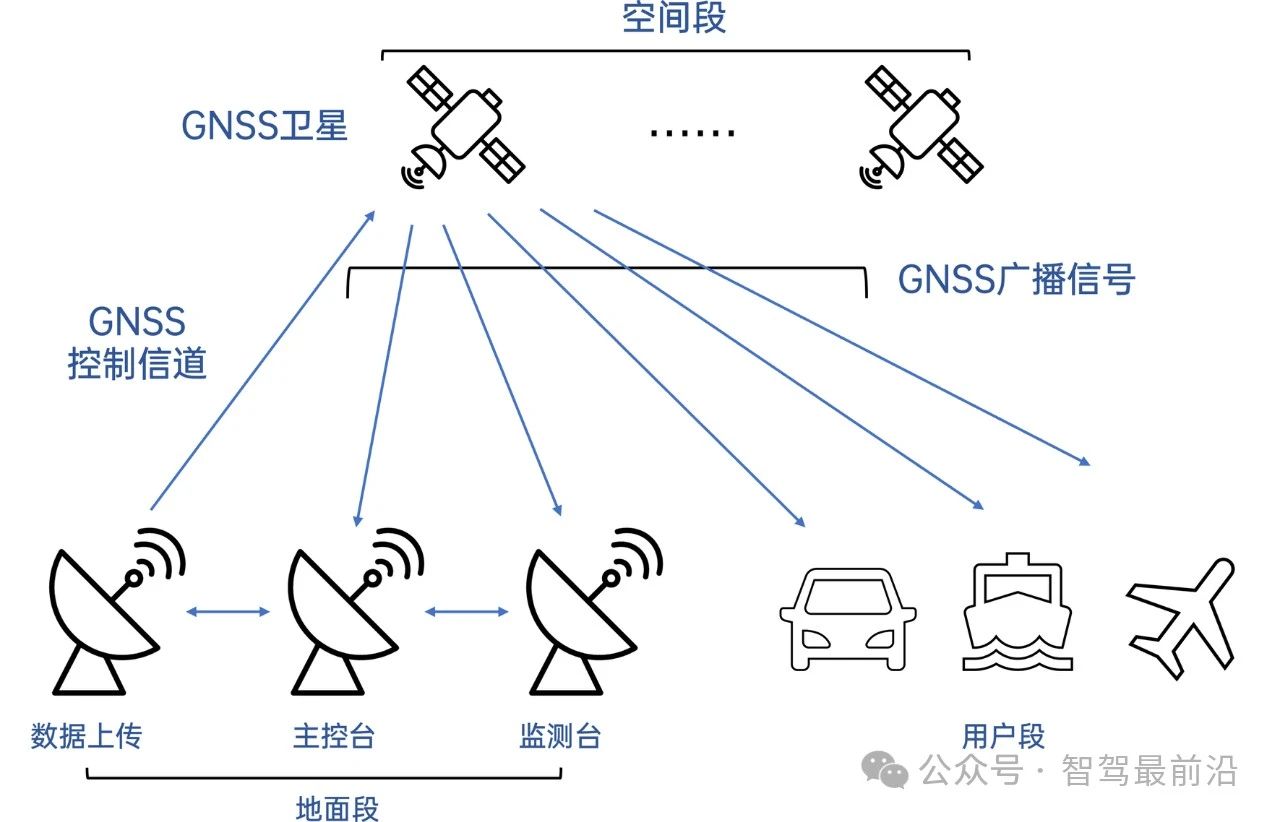
GNSS系統和其他衛星通信一樣,可以從結構上大概分成三部分:空間段-地面段-用戶段,其中「1」:空間段:在地球上空20,000至37,000公里之間運行的GNSS衛星;這些衛星廣播信號,識別正在傳輸的衛星及其時間、軌道和健康狀況。地面段:是一個由位于世界各地的主控、數據上傳和監測站組成的控制網絡,主要負責這些站接收衛星信號,并將衛星顯示的位置與軌道模型顯示的位置進行比較并進行修正。而這里的軌道模型與預測數據就被稱為星歷(ephemeris)用戶段:所有可以接收衛星信號并根據至少四顆衛星的時間和軌道位置輸出位置的設備都可以稱之為用戶端,主要包含信號接收天線,可處理該信號并輸出位置信息的接收與定位模塊。其中有采用基準站與流動站參照提高定位精度的定位模塊,也就是RTK。目前,隨著自動駕駛與智能物聯網等技術的發展,高精度定位發展也越發迅猛,對定位精度與定位效果測試的需求也越來越多。
1.2高精度GNSS增強技術
傳統的GNSS系統定位精度在米級范圍內,而自動駕駛要求的定位精度需達到亞米級甚至厘米級。在自動駕駛中,RTK(實時動態差分)和PPP(精密單點定位)是兩種常用的GNSS增強技術,它們能夠通過差分計算和誤差校正,將定位精度提升至厘米級別。RTK通過基準站與流動站之間的差分信息計算誤差,而PPP則通過精密的衛星軌道和時鐘數據校正誤差。
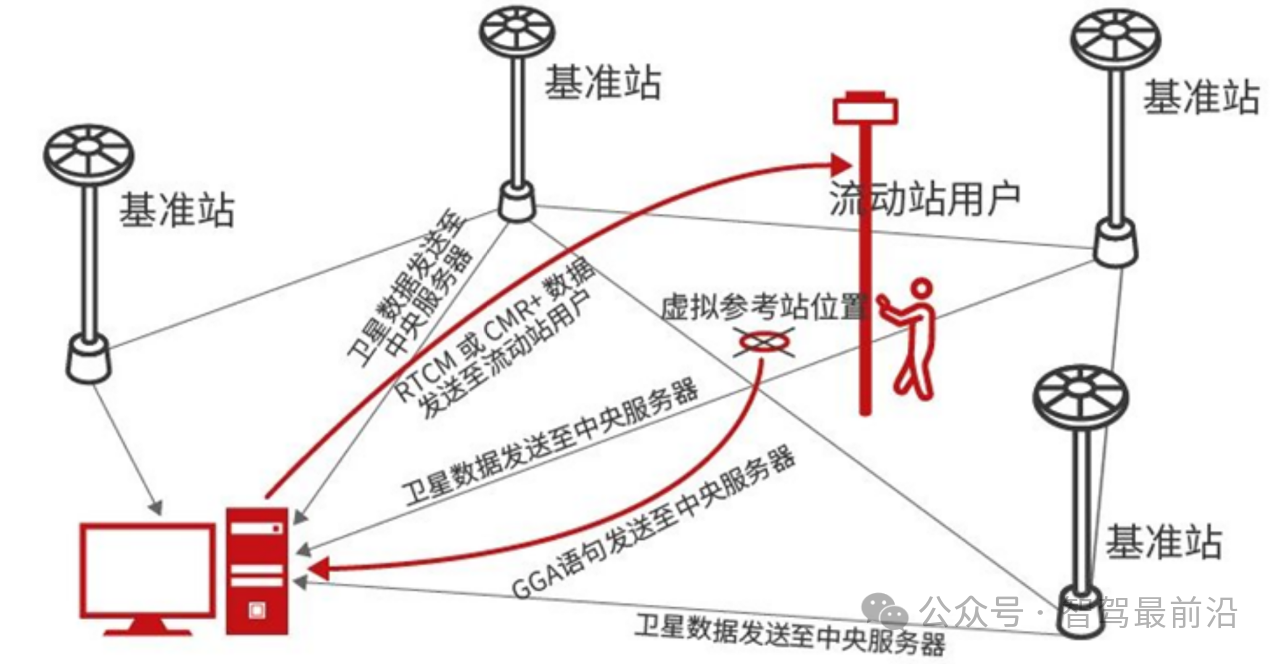
RTK工作原理示意圖
GNSS在自動駕駛中的應用
在自動駕駛車輛中,精確的位置信息是實現路徑規劃、車道保持、避障以及自動泊車等功能的前提。自動駕駛的不同應用場景對于定位精度、信號穩定性和實時性有不同的要求,而GNSS能夠滿足多種應用場景的需求,并與其他傳感器技術協同工作,提升車輛定位的穩定性和安全性。

2.1高速公路場景中的應用
在高速公路場景下,自動駕駛車輛通常以較高速度行駛,GNSS在這種場景中的應用尤為重要。車輛需要實時獲取精確的位置、速度和時間數據,以保持車道居中行駛并與其他車輛保持安全距離。通過GNSS與車載傳感器如激光雷達、毫米波雷達的融合,自動駕駛系統能夠快速響應突發情況,如緊急剎車或超車,確保行駛安全。GNSS的RTK技術能夠在開闊的高速公路上提供精確的車輛位置,不受建筑物等障礙物的遮擋影響,實時調整車輛的位置和速度。而PPP技術在大范圍內提供高精度定位服務,彌補RTK在基站覆蓋不足區域的限制。
2.2城市道路與復雜環境中的應用
在城市道路中,GNSS信號容易受到高樓、樹木等障礙物的阻擋,導致多路徑效應和信號反射問題,從而影響定位精度。這是自動駕駛中常見的技術挑戰之一。為了解決這個問題,自動駕駛系統通常會采用GNSS與其他傳感器的融合技術。例如,慣性導航系統(INS)可以與GNSS結合,當GNSS信號丟失時,INS能夠依靠陀螺儀和加速度計提供短時間內的相對位置信息,確保自動駕駛系統不會因為短暫的信號丟失而出現決策錯誤。此外,城市中的自動駕駛車輛需要具備更高的路徑規劃能力,尤其是在復雜的交叉口、停車場等場景中,車輛必須依賴GNSS提供準確的地理位置和車道級定位能力。隨著北斗系統和伽利略系統的逐漸完善,多星座、多頻段GNSS技術可以通過更多的衛星信號提供冗余數據,進一步提升定位精度和信號穩定性。
2.3無人駕駛農機與其他垂直應用
自動駕駛不僅在乘用車領域得到廣泛應用,在無人駕駛農機、物流車輛等領域也得到了快速發展。例如,在農業自動駕駛中,GNSS能夠為無人農機提供厘米級的定位精度,用于實現自動播種、耕作和施肥等任務。通過GNSS與其他地理信息系統(GIS)的結合,農機能夠精準地識別地塊邊界、作業范圍和規劃路徑,實現農業生產的自動化。
GNSS在自動駕駛中的技術挑戰
雖然GNSS在自動駕駛中發揮了重要作用,但在實際應用中,仍然面臨諸多技術挑戰。為了確保車輛能夠在復雜的道路環境中安全行駛,GNSS技術需要進一步提升其抗干擾能力、誤差校正機制和信號穩定性。
3.1多路徑效應和信號遮擋問題
多路徑效應是GNSS應用中的主要問題之一,尤其是在城市高樓林立的環境中,信號容易反射并產生誤差。多路徑效應會導致定位信號的不準確,進而影響自動駕駛車輛的路徑規劃和控制決策。為了解決這一問題,現代GNSS系統通過使用多頻段衛星信號、增強接收器的濾波能力以及結合其他定位傳感器(如視覺傳感器、慣性導航)等方式,提高系統的抗干擾能力。信號遮擋問題在城市和隧道等環境中同樣顯著。當車輛進入衛星信號受限區域時,GNSS信號的可用性下降,導致定位數據不可用。為應對這一問題,車輛的定位系統必須具備數據冗余能力,能夠通過其他傳感器如IMU(慣性測量單元)、V2X(車對車及車對基礎設施通信)等提供備份方案,以避免系統在信號中斷期間出現重大錯誤。
3.2電離層和對流層誤差的影響
GNSS信號在傳輸過程中,會經過電離層和對流層,這些大氣層中的物質會對衛星信號的傳播速度產生影響,進而導致信號到達接收器的時間出現偏差,形成定位誤差。這種誤差在普通的導航應用中影響不大,但對于要求厘米級精度的自動駕駛而言,必須進行有效的誤差校正。電離層誤差在高精度GNSS應用中尤為關鍵。為了消除這一誤差,GNSS系統采用了雙頻定位技術,通過同時接收不同頻率的衛星信號,解算出電離層對信號的延遲影響,并對其進行修正。此外,地基增強系統(GBAS)和星基增強系統(SBAS)等服務,也通過實時傳輸精確的電離層數據,為自動駕駛車輛提供可靠的誤差校正信息。
3.3定位初始化時間與精度問題
在高精度GNSS定位中,RTK和PPP技術都面臨一個共同的問題,即定位初始化時間較長。特別是PPP技術,通常需要十幾分鐘的初始化時間才能獲得高精度的定位結果,這在自動駕駛中的實時應用具有一定的局限性。為了解決這個問題,PPP-RTK技術應運而生,它結合了RTK和PPP的優點,能夠在較短時間內實現厘米級精度的定位,并且在基站覆蓋不足的情況下依然能夠保持較高的定位精度。隨著衛星星座的增加和多頻段技術的完善,PPP-RTK將成為自動駕駛高精度定位的未來發展方向。
GNSS未來發展方向
隨著5G通信網絡的逐步普及以及低軌道衛星技術的快速發展,GNSS的應用前景更加廣闊。未來的GNSS技術將與其他先進技術深度融合,進一步提升自動駕駛車輛的定位精度和安全性。
4.1GNSS與V2X技術的融合
V2X技術是自動駕駛發展的重要支撐,它能夠實現車輛之間、車輛與基礎設施之間的實時通信。通過V2X,車輛可以共享位置信息、速度信息以及交通信號等數據,從而實現更高效的路徑規劃和更安全的駕駛決策。GNSS為V2X提供了基礎的位置信息,確保車輛在動態交通環境中能夠實時獲取準確的位置和速度信息,并通過V2X與其他車輛協調合作。未來,隨著V2X技術的普及,GNSS與V2X的結合將大幅提升自動駕駛系統的整體性能,確保自動駕駛車輛在復雜的交通網絡中實現協同駕駛和集群管理。
4.2低軌道衛星與GNSS結合的前景
傳統的GNSS系統以中高軌道衛星為主,雖然能夠提供全球覆蓋的定位服務,但在信號延遲和精度上仍存在一定的局限性。隨著低軌道衛星技術的發展,未來的GNSS系統將引入低軌道衛星,進一步提升定位精度、減少信號延遲。低軌道衛星的優勢在于其距離地面更近,信號傳播時間更短,能夠提供更高的更新頻率和更低的延遲。此外,低軌道衛星還可以彌補現有GNSS系統在偏遠地區和城市高密度區域中的信號覆蓋不足,提供更穩定的定位服務。低軌道衛星與現有GNSS的融合,將為自動駕駛提供更強大的技術支撐,尤其在自動駕駛等級提升到L4、L5時,對高精度、實時性要求極高的場景中。
結論
高精度GNSS是自動駕駛技術中的重要組成部分,它為自動駕駛車輛提供了實時、可靠的位置信息,確保車輛能夠在復雜的道路環境中安全行駛。隨著自動駕駛技術的發展,GNSS的定位精度、覆蓋范圍和抗干擾能力都在不斷提升。未來,GNSS將與其他先進技術如V2X、低軌道衛星、5G網絡等深度融合,進一步推動自動駕駛技術的普及與應用。在這個過程中,GNSS將成為自動駕駛系統中不可或缺的技術基石,為實現更加安全、智能、高效的交通系統提供支持。
參考
「1」https://blog.csdn.net/hongke_weixin/article/details/130052430
審核編輯 黃宇
-
衛星系統
+關注
關注
0文章
74瀏覽量
17429 -
GNSS
+關注
關注
9文章
776瀏覽量
48001 -
自動駕駛
+關注
關注
784文章
13852瀏覽量
166579
發布評論請先 登錄
相關推薦
自動駕駛真的會來嗎?
意法半導體推出世界首個定位精度達到自動駕駛級別且符合汽車安全標準的多頻GNSS接收器
UWB主動定位系統在自動駕駛中的應用實踐
如何讓自動駕駛更加安全?
自動駕駛的出現讓GPS變得危險
中國第二代導航衛星系統發展到了什么程度?
傳感器融合方案改進智能車輛的定位系統
UWB高精度定位在自動駕駛中的應用前景
全球導航衛星系統進展及對導航定位的改善
ADI與北云科技合作推出高精度組合導航板卡,加速自動駕駛系統的商業化進程
上海計量院開發全球導航衛星系統的算法,應用于農機自動駕駛領域
自動駕駛汽車整體架構

高精自動駕駛中的地圖匹配定位技術





 工商網監
工商網監
評論