 PCIe EtherCAT實時運動控制卡PCIE464的IO與編碼器讀寫應用
PCIe EtherCAT實時運動控制卡PCIE464的IO與編碼器讀寫應用
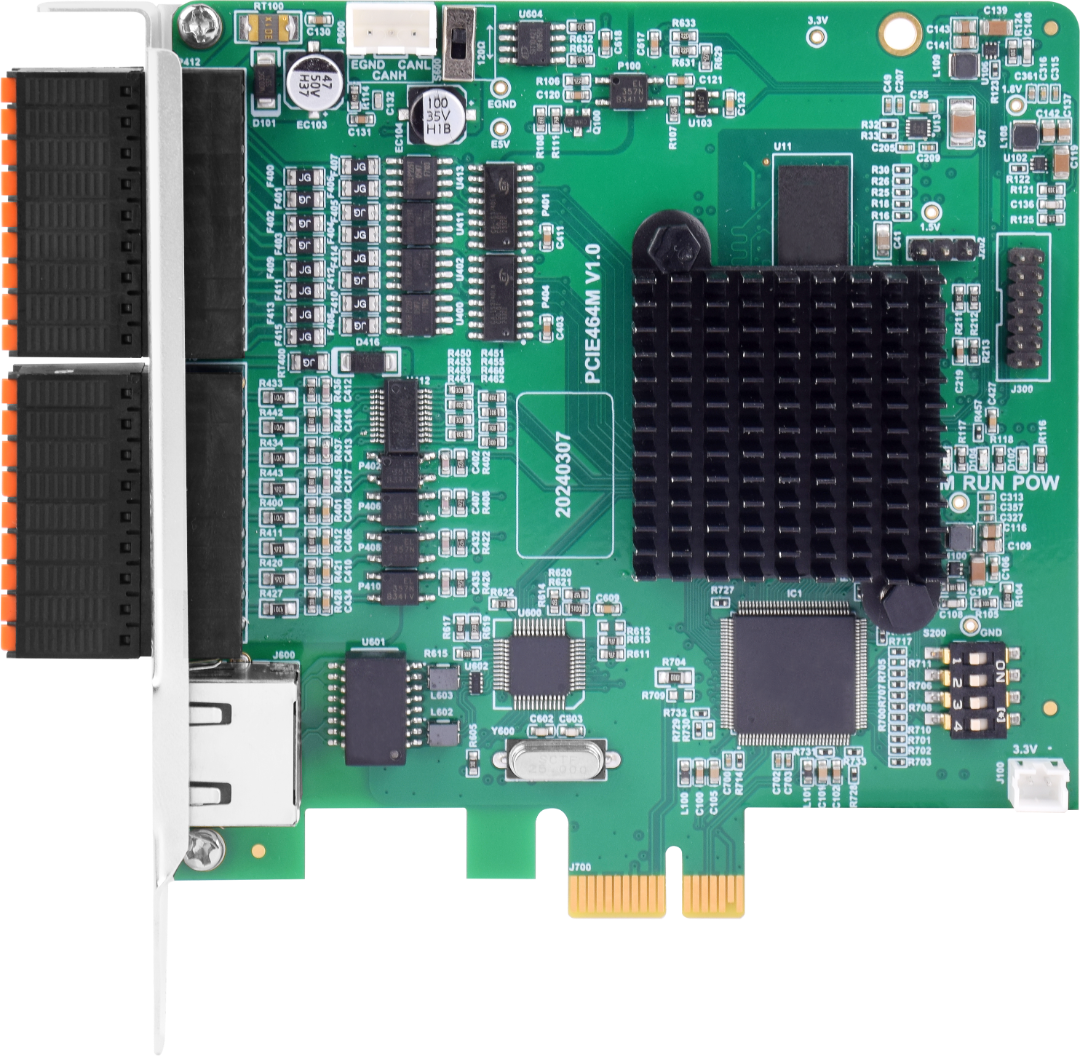
硬件介紹
PCIE464運動控制卡是正運動推出的一款EtherCAT總線+脈沖型、PCIE接口式的運動控制卡,可選6-64軸運動控制,支持多路高速數字輸入輸出,可輕松實現多軸同步控制和高速數據傳輸。
PCIE464運動控制卡適合于多軸點位運動、插補運動、軌跡規劃、手輪控制、編碼器位置檢測、IO控制、位置鎖存等功能的應用。PCIE464運動控制卡適用于3C電子加工、檢測設備、半導體設備、SMT加工、激光加工、光通訊設備、鋰電及光伏設備、以及非標自動化設備等高速高精應用場合。
PCIE4系列控制卡的應用程序可以使用VC,VB,VS,C++,C#等軟件開發,程序運行時需要動態庫zmotion.dll,調試時可以將RTSys軟件同時連接控制器,從而方便調試、方便觀察。

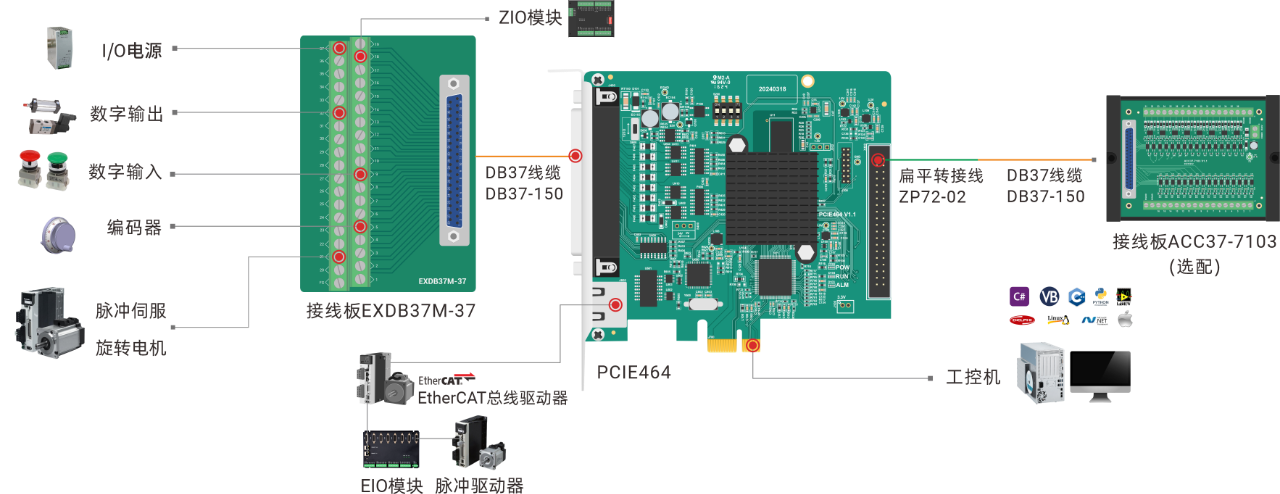
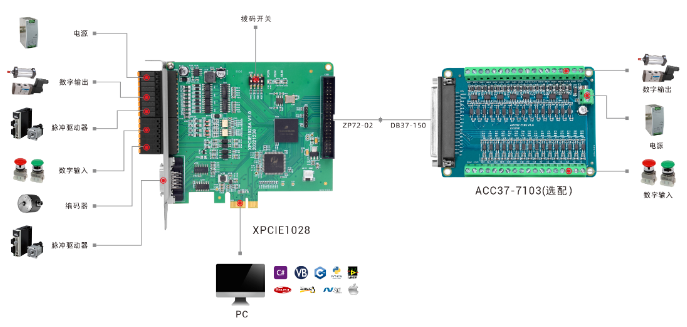
接線參考
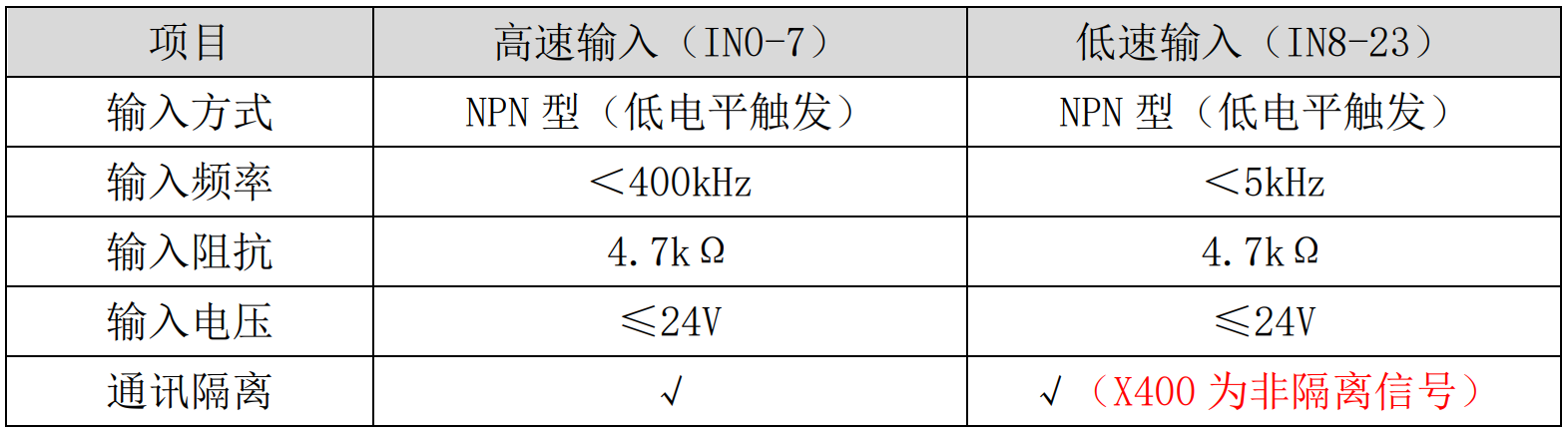
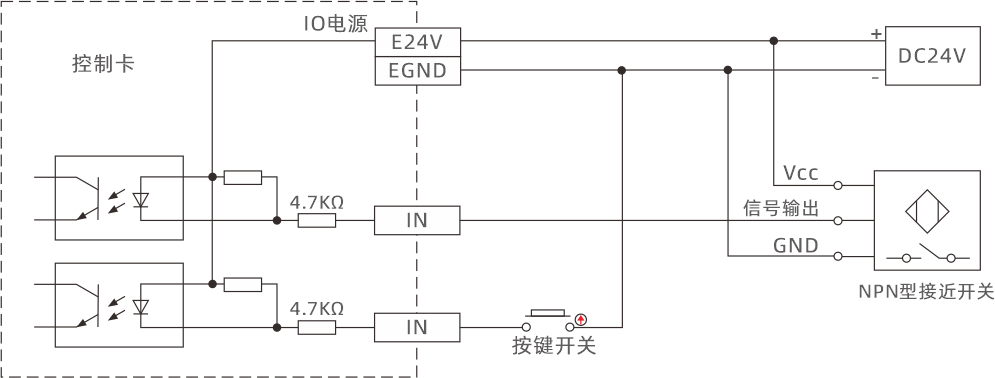
1、IN數字量輸入接口
數字輸入分布在J400(IN0-IN7)和X400(IN8-IN39)信號接口中。
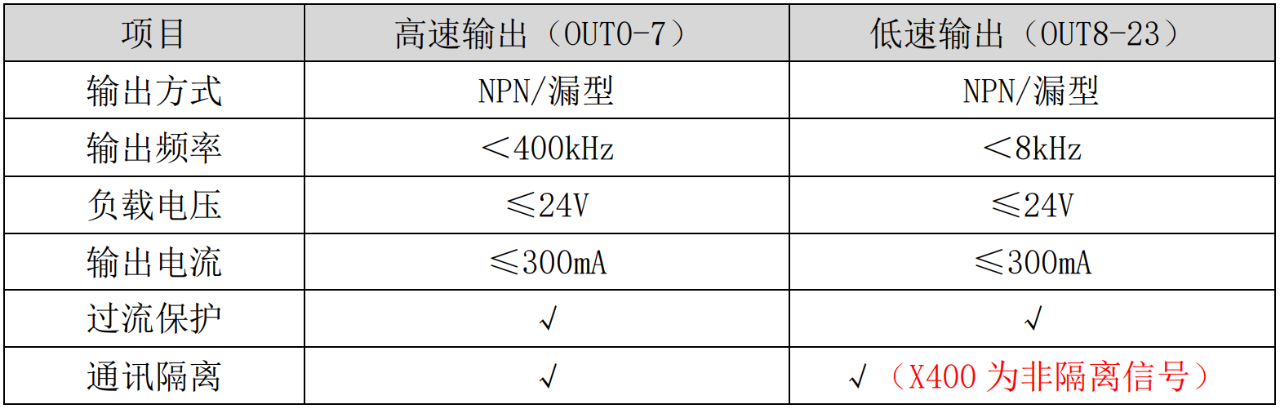
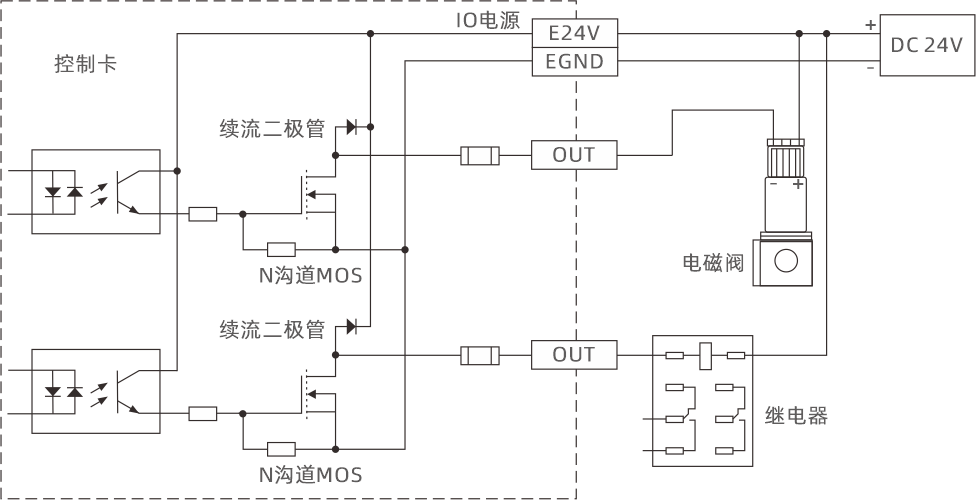
2、OUT數字量輸出接口
數字輸出分布在 J400(OUT0-7)和 X400(OUT8-OUT39)信號接口中。
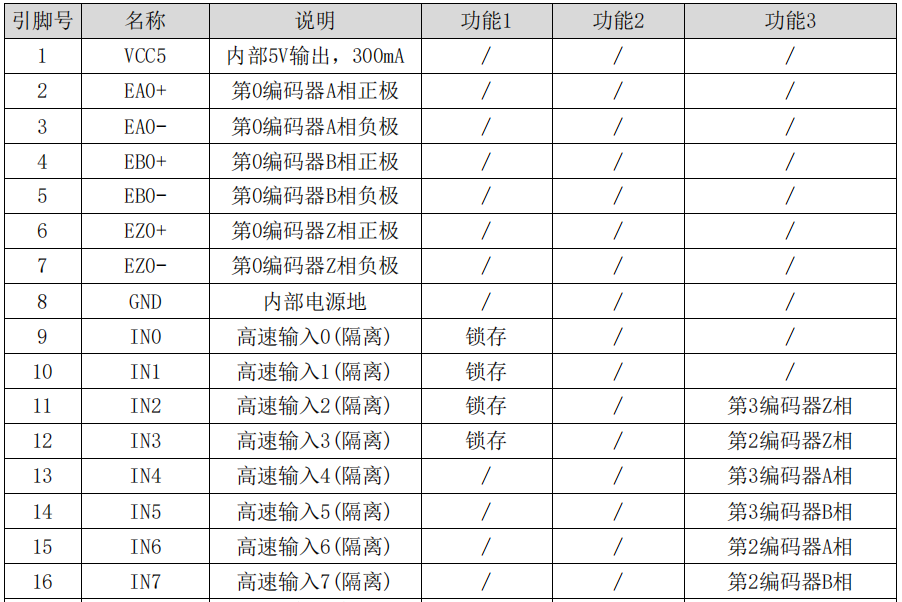
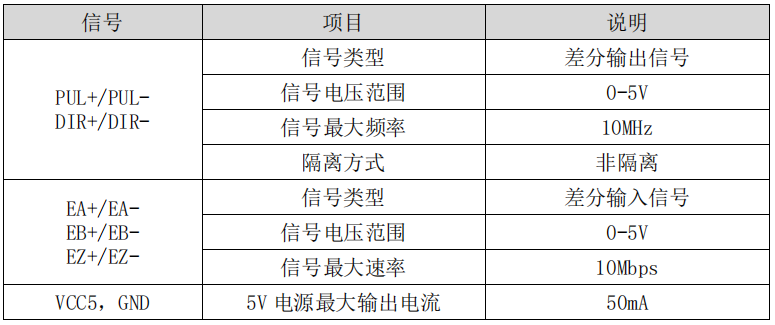
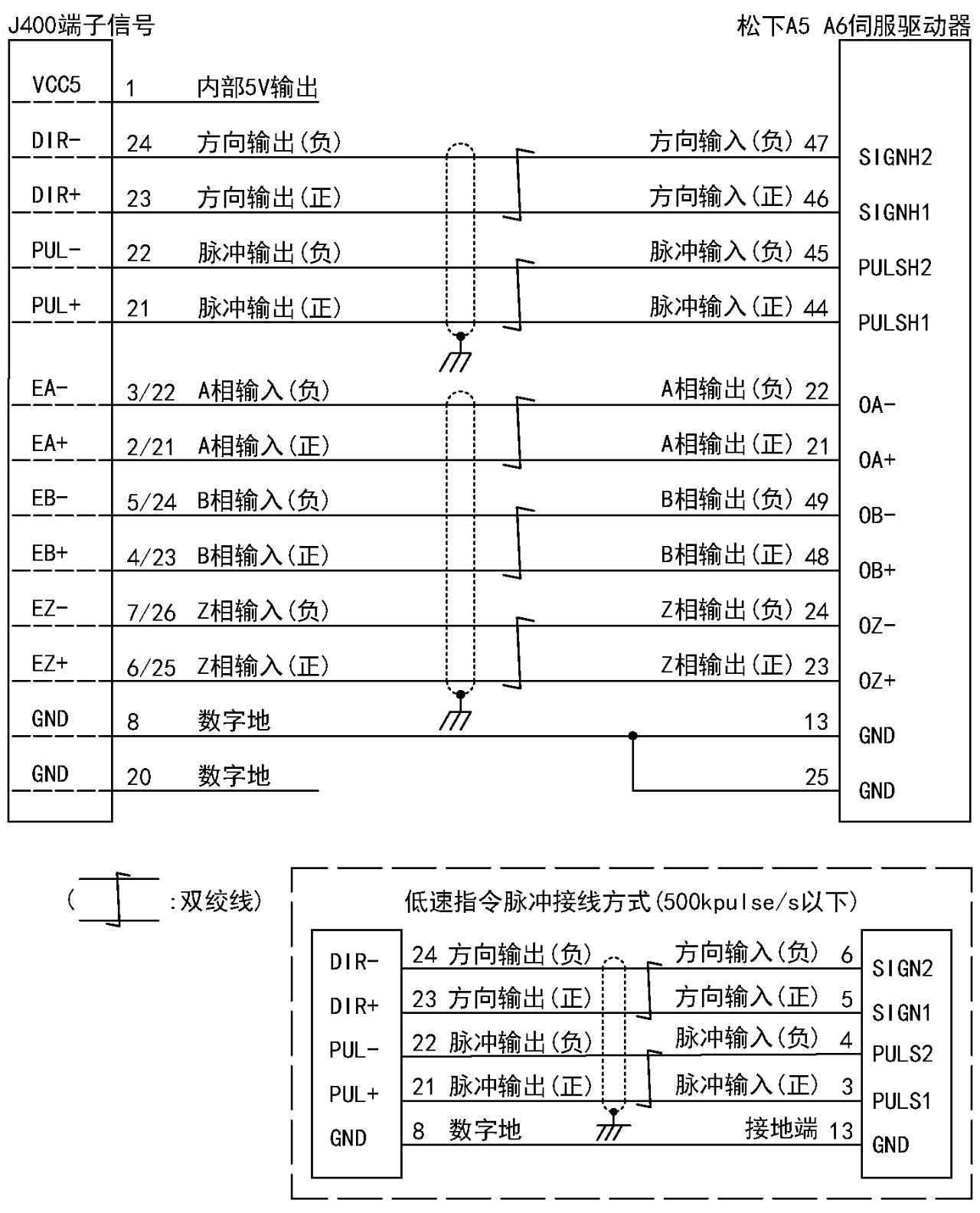
3、編碼器輸入接口
J400包含一個差分脈沖輸出接口,一個差分編碼器反饋,通過轉接板接入。其中IN2-7有單端編碼器軸的功能,只支持24V編碼器輸入。

C#語言進行項目開發
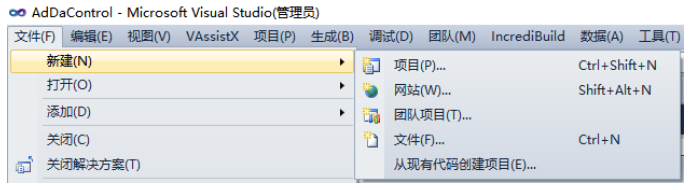
1、在VS2010菜單“文件”→“新建”→“項目”,啟動創建項目向導。
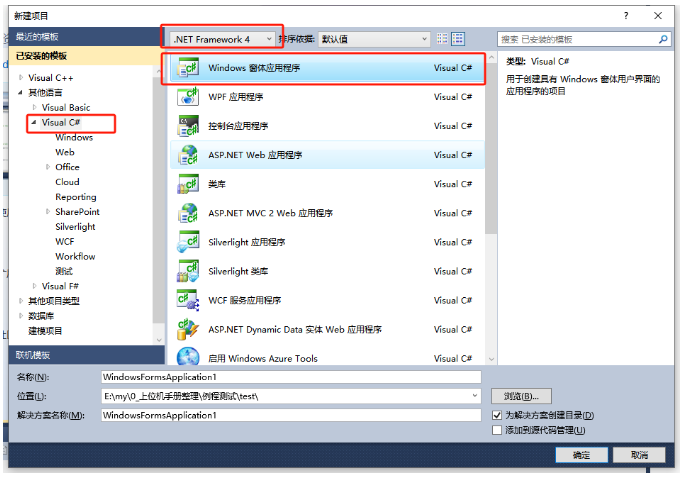
2、選擇開發語言為“Visual C#”和.NET Framework 4以及Windows窗體應用程序。
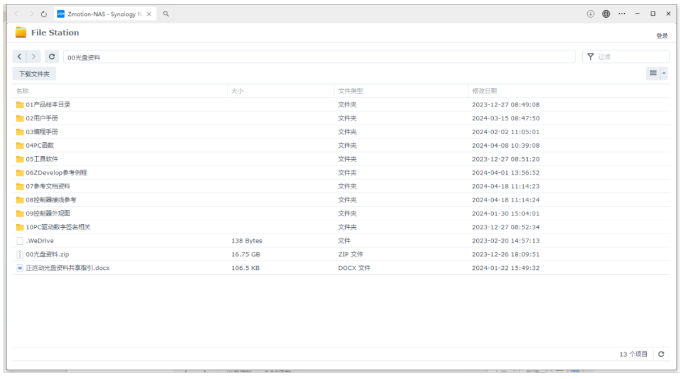
3、找到廠家提供的光盤資料里面的C#函數庫,路徑如下(32位庫為例)。
1)進入廠商提供的光盤資料找到“04PC函數”文件夾,并點擊進入。
2)選擇“函數庫2.1”文件夾。
3)選擇“Windows平臺”文件夾。
4)根據需要選擇對應的函數庫,這里選擇32位庫。
5)解壓C#壓縮包,里面有C#對應的函數庫。

6)函數庫具體路徑如下。
4.將廠商提供的C#的庫文件以及相關文件復制到新建的項目中。
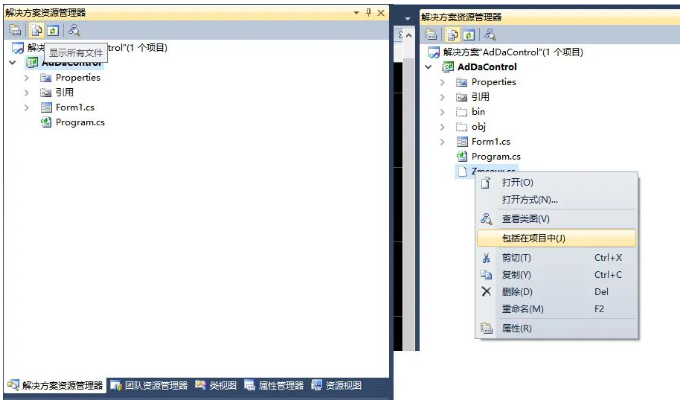
1)將zmcaux.cs文件復制到新建的項目里面中。
2)將zauxdll.dll和zmotion.dll文件放入bindebug文件夾中。
5.雙擊Form1.cs里面的Form1,出現代碼編輯界面,在文件開頭寫入using cszmcaux,并聲明控制器句柄g_handle。
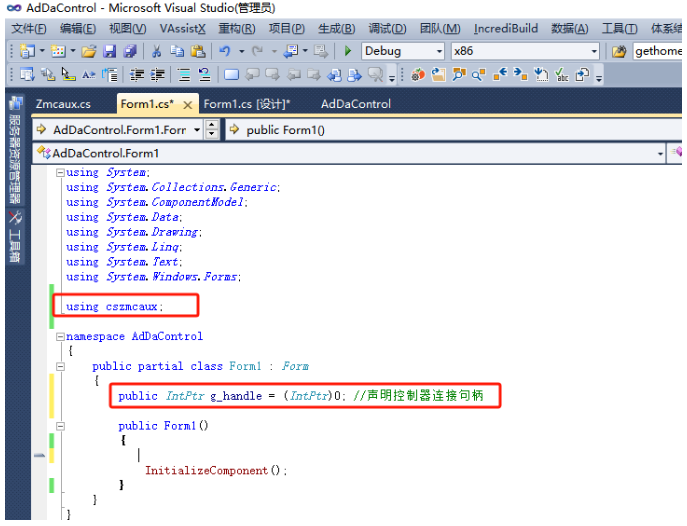
6、至此,項目新建完成,可進行C#項目開發。
PC函數介紹
1.PC函數手冊可在光盤資料查看,具體路徑如下。
2.鏈接控制卡,獲取鏈接句柄。
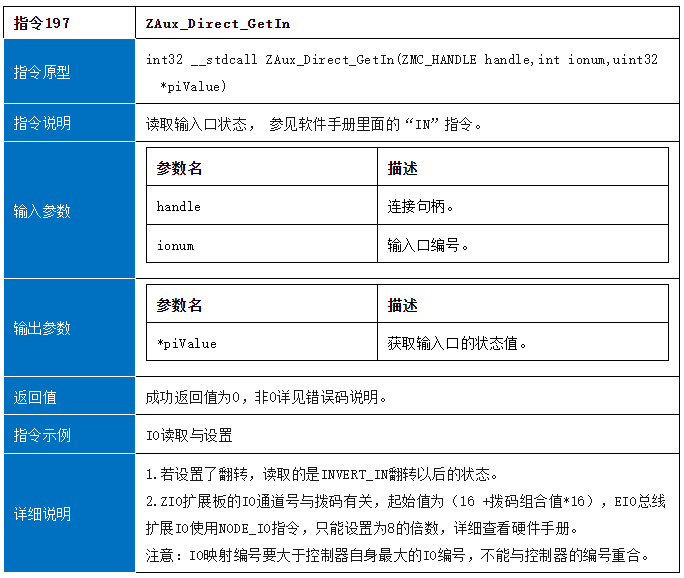
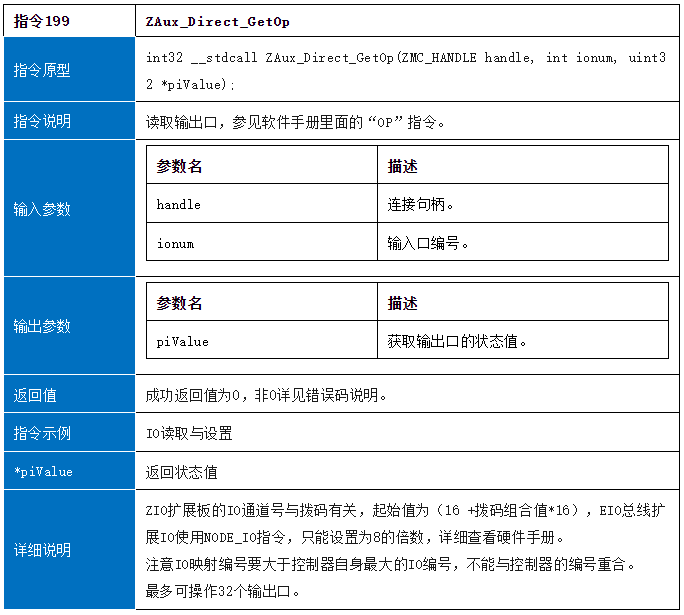
3.讀取單個I/O信號。
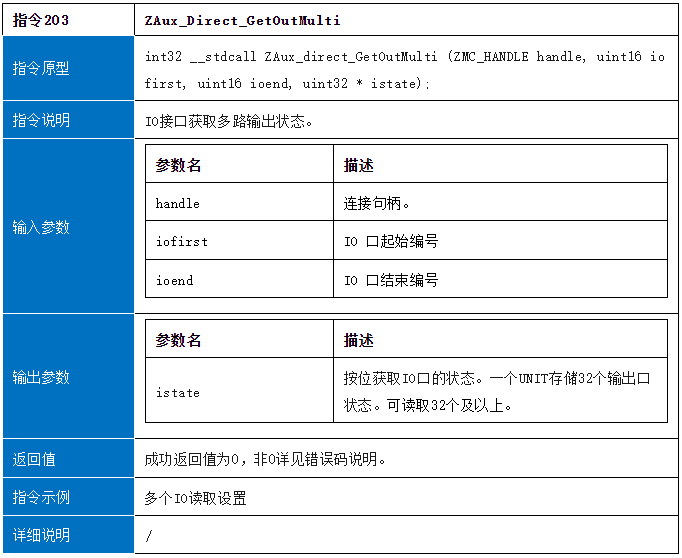
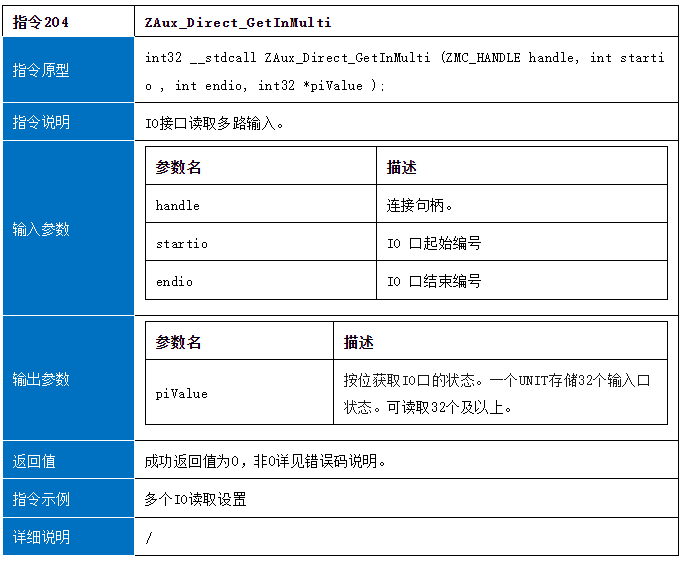
4.批量讀取I/O信號。
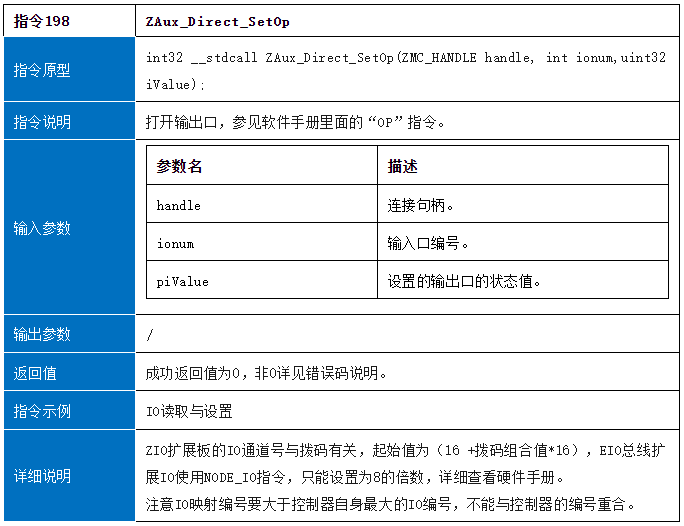
5.設置單個輸出口。
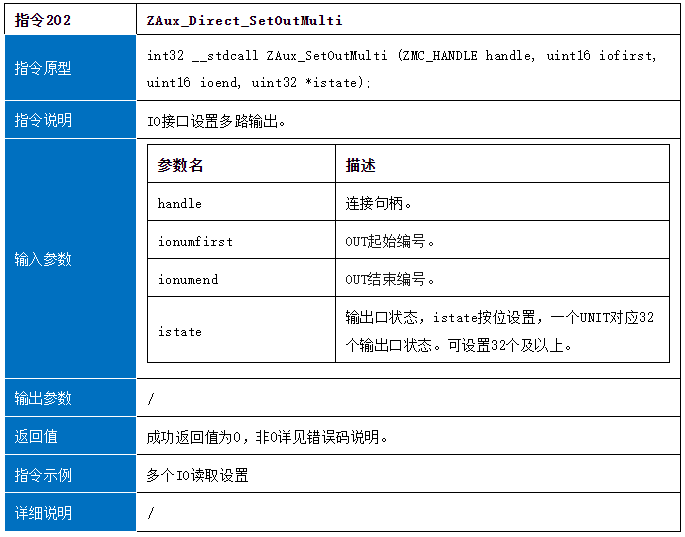
6.批量設置輸出口。
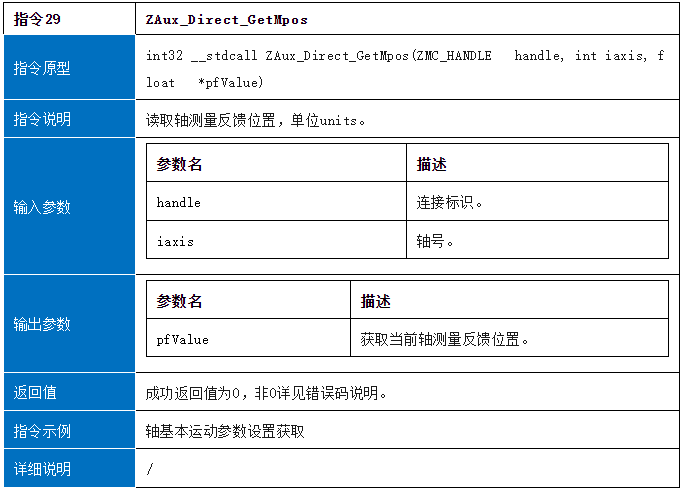
7.讀取單軸編碼器反饋位置。
8.批量讀取編碼器反饋位置,BASIC字符串為MPOS。
9.自定義函數封裝指令。
單個或批量讀取IO和編碼器數據
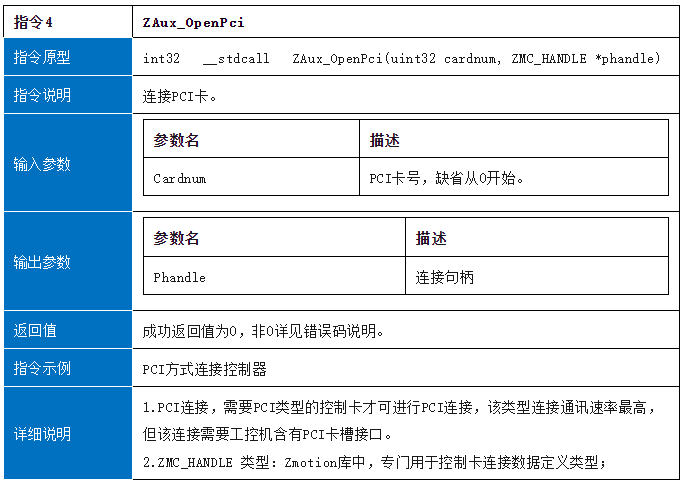
1.鏈接控制器獲取句柄,上位機操作通過獲取到的句柄來操作控制器。
//連接PCIe控制卡,控制卡卡號缺省從0開始
int ret = zmcaux.ZAux_OpenPci(0, out g_handle);
if (g_handle != (IntPtr)0)
{
MessageBox.Show("控制卡鏈接成功!" , "提示");
timer_GetData.Enabled = true; //開啟定時器或在單獨線程里實時讀取I/O信號
}
else
{
MessageBox.Show("控制卡鏈接失敗,請檢測PCI卡號!" , "警告");
}
2.開啟定時器實時讀取I/O信號。
//定時器刷新I/O和軸反饋數據
private void timer_GetData_Tick(object sender, EventArgs e)
{
uint[] instate = new uint[4];
uint[] opstate = new uint[4];
float[] mpos = new float[4];
for (int i = 0; i < 4; i++)
{
zmcaux.ZAux_Direct_GetIn(g_handle, i, ref instate[i]); //讀取單個IN
zmcaux.ZAux_Direct_GetOp(g_handle, i, ref opstate[i]); //讀取單個OUT
zmcaux.ZAux_Direct_GetMpos(g_handle, i, ref mpos[i]); //讀取單軸反饋位置MPOS
}
IN0.Checked = (instate[0] == 1);
IN1.Checked = (instate[1] == 1);
IN2.Checked = (instate[2] == 1);
IN3.Checked = (instate[3] == 1);
OP0.Checked = (opstate[0] == 1);
OP1.Checked = (opstate[1] == 1);
OP2.Checked = (opstate[2] == 1);
OP3.Checked = (opstate[3] == 1);
MPOS0.Text = mpos[0].ToString();
MPOS1.Text = mpos[1].ToString();
MPOS2.Text = mpos[2].ToString();
MPOS3.Text = mpos[3].ToString();
int[] inputs = new int[4];
uint[] outputs = new uint[4];
float[] allmpos = new float[8];
zmcaux.ZAux_Direct_GetInMulti(g_handle, 16, 31, inputs); //批量讀取輸入IN16-31
zmcaux.ZAux_Direct_GetOutMulti(g_handle, 16, 31, outputs); //批量讀取輸出OUT16-31
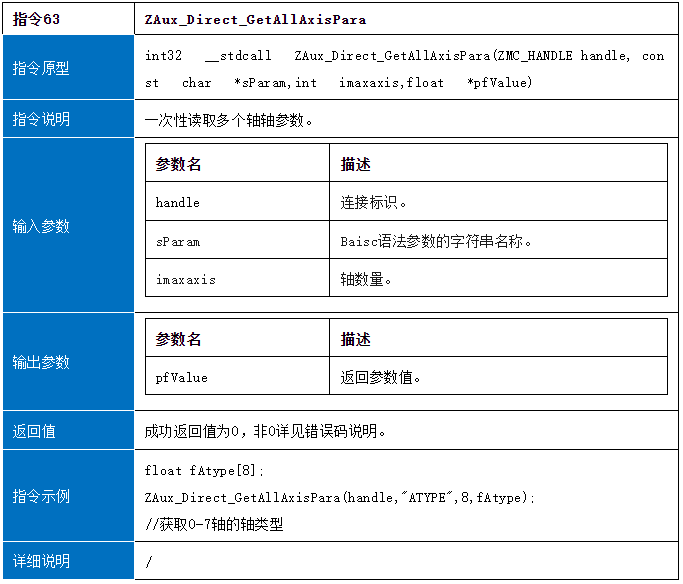
zmcaux.ZAux_Direct_GetAllAxisPara(g_handle, "MPOS", 8, allmpos);//批量讀取軸反饋位置MPOS 0-7
InputGroup1631.Text = inputs[0].ToString("X4");
}
3.單個或批量設置OP輸出口。
//單個輸出口狀態切換函數 private void OP0_CheckedChanged(object sender, EventArgs e) { if (g_handle == (IntPtr)0) { MessageBox.Show("未鏈接到控制卡!", "提示"); return; } if (OP0.Checked) { zmcaux.ZAux_Direct_SetOp(g_handle,0, 1); OP0.Text = "out0 打開"; } else { zmcaux.ZAux_Direct_SetOp(g_handle, 0, 0); OP0.Text = "out0 關閉"; } } //批量切換輸出口狀態函數 private void OutputGroup03_CheckedChanged(object sender, EventArgs e) { if (g_handle == (IntPtr)0) { MessageBox.Show("未鏈接到控制卡!", "提示"); return; } uint[] iostate = new uint[4]; if (OutputGroup03.Checked) { iostate[0] = 0xF; //以二進制組合OUT,十六進制0xF即OUT0-3全部置1 zmcaux.ZAux_Direct_SetOutMulti(g_handle, 0, 3, iostate); OutputGroup03.Text = "全部置ON"; OP0.Checked = true; OP1.Checked = true; OP2.Checked = true; OP3.Checked = true; } else { iostate[0] = 0x0; zmcaux.ZAux_Direct_SetOutMulti(g_handle, 0, 3, iostate); OutputGroup03.Text = "全部置OFF"; OP0.Checked = false; OP1.Checked = false; OP2.Checked = false; OP3.Checked = false; } }
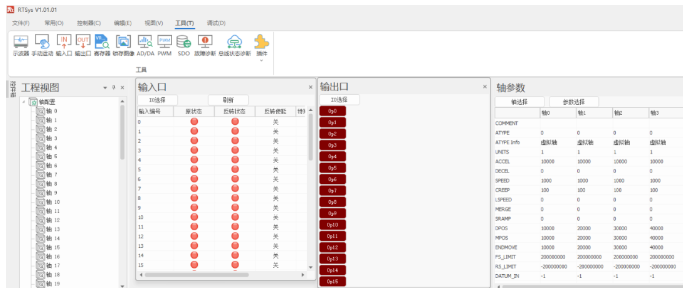
4.若想驗證通過函數獲取的IO狀態和數據是否準確,可以使用正運動的調試軟件RTSys連接到控制卡。
通過工具→輸入口/輸出口觀察當前控制卡的實時IO狀態,通過軸參數窗口觀察各軸的反饋位置MPOS,并與C#獲取的數據進行對比。

5.自定義函數封裝,單條命令批量獲取需要的部分I/O和部分軸數據。
通過組合不同的Basic命令字符串,中間以英文逗號字符隔開,一次性下發讀取所需的數據,如:
(1)獲取某個輸入信號,對應Basic命令字符串為:IN(輸入口序號);(2)獲取某個輸出信號,對應Basic命令字符串為:OP(輸入口序號);(3)獲取某軸反饋位置,對應Basic命令字符串為:MPOS(軸號);其他參數也可以使用此方式,具體Basic字符串可參考PC手冊“軸參數指令表”。
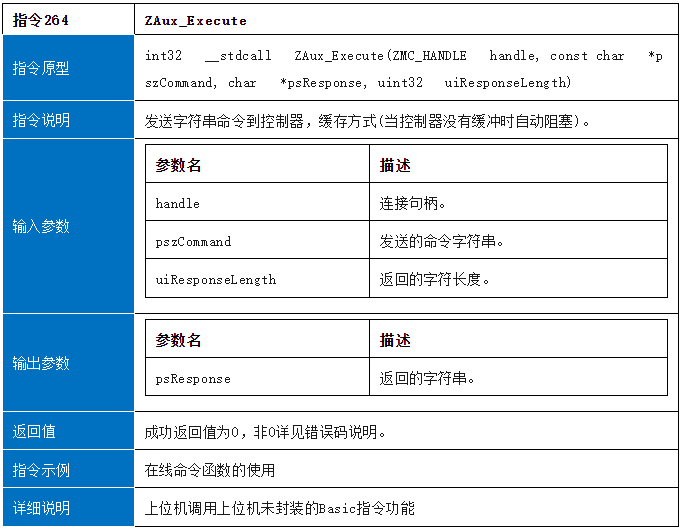
舉例說明,需要單條命令獲取輸入0,輸入3,輸出1,輸出4,軸2和軸5的反饋數據,則需要通過ZAux_Execute函數下發字符串:
“?IN(0),IN(3),OP(1),OP(4),MPOS(2),MPOS(5)”;
其中,英文 “?”字符和“PRINT”字符為同一含義,表示讀取后續參數的值;參數字符不用區分大小寫。
private void getData_Click(object sender, EventArgs e)
{
//通過Execute函數發送Basic字符串組合實現一次性讀取多個參數
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未鏈接到控制卡!", "提示");
return;
}
string pszCommand; //發送的Basic命令字符串
StringBuilder psResponse = new StringBuilder(1024); //接收返回的字符串
uint uiResponseLength = 1024; //接收返回的字符長度,不能小于接收的字符串長度
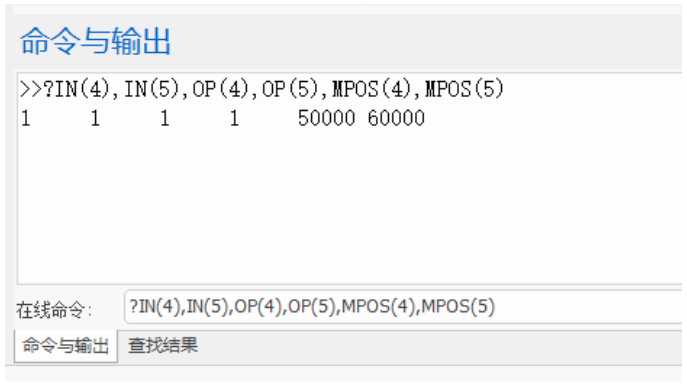
pszCommand = "?IN(4),IN(5),OP(4),OP(5),MPOS(4),MPOS(5)";//讀取數據Basic字符串,共6個數據
zmcaux.ZAux_Execute(g_handle, pszCommand, psResponse, uiResponseLength);
string psResponseResult = "";
psResponseResult += psResponse;
string[] parts = psResponseResult.Split('t'); //這里以空格對字符串分割
IN4.Checked = Convert.ToInt32(parts[0]) == 1;
IN5.Checked = Convert.ToInt32(parts[1]) == 1;
OP4.Checked = Convert.ToInt32(parts[2]) == 1;
OP5.Checked = Convert.ToInt32(parts[3]) == 1;
MPOS4.Text = parts[4];
MPOS5.Text = parts[5];
}

調試軟件RTSys命令與輸出窗口的在線命令,與上述封裝函數為相同的功能。
本次,正運動技術PCIe EtherCAT實時運動控制卡PCIE464的IO與編碼器讀寫應用,就分享到這里。
更多精彩內容請關注“正運動小助手”公眾號,需要相關開發環境與例程代碼,請咨詢正運動技術銷售工程師。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
審核編輯 黃宇
-
編碼器
+關注
關注
45文章
3648瀏覽量
134731 -
運動控制
+關注
關注
4文章
584瀏覽量
32899 -
運動控制卡
+關注
關注
7文章
113瀏覽量
15478 -
ethercat
+關注
關注
18文章
700瀏覽量
38740 -
正運動技術
+關注
關注
0文章
102瀏覽量
439
發布評論請先 登錄
相關推薦
【正運動】高速高精,超高實時性的PCIe EtherCAT實時運動控制卡 | PCIE464



EtherCAT運動控制卡之ECI2820如何使用
步進、伺服電機控制,運動控制卡回原點、定長運動、高低速、編碼器實驗例程
不止10倍提速!PCIe EtherCAT實時運動控制卡XPCIE1032H 等您評測!

超高速PCIe實時運動控制卡解決方案

高速視覺篩選機PCIe實時運動控制卡XPCIE1028簡介





 工商網監
工商網監
評論