 巡線機器人電路圖 巡線機器人的工作原理和應用領域
巡線機器人電路圖 巡線機器人的工作原理和應用領域
引言
巡線機器人,作為一種先進的智能巡檢設備,近年來在多個領域得到了廣泛應用。它以移動機器人為載體,搭載多種檢測儀器,通過機器視覺、電磁場、GPS、GIS等多場信息融合技術,實現自主移動、自主巡檢與數據分析。本文將詳細闡述巡線機器人的定義、工作原理及其在多個領域的應用,以及還將分享一些巡線機器人電路圖,以期為讀者提供一個全面而深入的了解。
一、巡線機器人的定義
巡線機器人,顧名思義,是一種專門用于沿著特定線路(如電力線路、鐵路軌道、管道走廊等)進行巡檢的機器人。它以移動機器人作為載體,通過搭載可見光攝像機、紅外熱成像儀、激光雷達等多種傳感器和檢測儀器,實現對目標線路及其周圍環境的全面監控與檢測。巡線機器人不僅具備自主移動與導航能力,還能進行障礙物檢測識別、自主作業規劃、自主越障等復雜操作,是工業自動化、智能巡檢領域的重要創新成果。
二、巡線機器人的工作原理
1. 導航與定位
巡線機器人的核心在于其自主導航與定位能力。這主要依賴于機器視覺、電磁場檢測、GPS定位以及GIS地理信息系統等多種技術的綜合應用。在巡檢過程中,機器人首先通過視覺傳感器捕捉線路標志或周圍環境特征,利用圖像處理技術識別并定位自身位置。同時,結合GPS信號和GIS地圖信息,機器人能夠實時更新自身位置,確保沿著預定線路準確行進。
2. 障礙物檢測與識別
為了保障巡檢任務的順利進行,巡線機器人還具備強大的障礙物檢測與識別能力。這主要通過激光雷達、超聲波傳感器等測距設備實現。在行進過程中,機器人會不斷掃描周圍環境,檢測并識別出可能存在的障礙物(如樹木、建筑物、其他設施等)。一旦發現障礙物,機器人會立即啟動避障算法,規劃出安全的繞行路徑,確保巡檢任務不受影響。
3. 自主作業規劃與執行
巡線機器人不僅具備自主導航和避障能力,還能根據巡檢任務的具體要求,自主規劃作業流程并執行相應操作。這包括設定巡檢路線、調整檢測參數、啟動檢測儀器等。通過嵌入式計算機作為控制系統的軟硬件開發平臺,機器人能夠實時處理傳感器數據,分析巡檢結果,并根據分析結果調整后續巡檢策略。
4. 數據采集與傳輸
巡線機器人在巡檢過程中會收集大量圖像、視頻、溫度、濕度等數據信息。這些數據通過機器人內部的存儲系統進行自動存儲,并通過無線通信技術實時傳輸至遠程監控中心。監控中心的工作人員可以通過電腦或移動設備遠程查看巡檢畫面和數據報告,及時了解線路運行狀態和潛在問題。
5. 自主越障與適應性調整
面對復雜多變的巡檢環境,巡線機器人還具備自主越障和適應性調整的能力。通過機械臂、履帶或輪腿等結構設計,機器人能夠輕松跨越溝壑、樓梯、障礙物等復雜地形。同時,機器人還具備自動調節高度、角度和速度等參數的能力,以適應不同的巡檢場景和需求。
三、巡線機器人的應用領域
1. 電力行業
在電力行業,巡線機器人被廣泛應用于電力線路的巡檢和維護工作。它們能夠沿著高壓線路、變電站等區域進行自主巡檢,檢測線路故障、設備老化、溫度異常等問題。通過紅外熱成像儀等檢測設備,機器人還能及時發現并預警潛在的火災隱患和過熱現象。此外,巡線機器人還能在惡劣天氣條件下進行巡檢工作,大大提高了電力巡檢的效率和安全性。
2. 鐵路和交通運輸業
在鐵路和交通運輸領域,巡線機器人同樣發揮著重要作用。它們可以在鐵路軌道上自主巡檢信號燈、軌道、道岔等設施的運行狀態,及時發現并解決故障和安全隱患。通過機器視覺技術,機器人還能對軌道進行高精度測量和定位,為鐵路維護提供精確的數據支持。此外,在交通運輸樞紐內,巡線機器人還能協助進行車輛調度和安全管理等工作。
3. 石油和天然氣行業
在石油和天然氣行業,巡線機器人被用于巡檢管道、儲罐和井場等設施。它們能夠沿著管道走廊自主行進,檢測管道泄漏、腐蝕、破損等問題。通過搭載的氣體檢測傳感器和紅外熱成像儀等設備,機器人還能實時監測管道周圍的環境參數和潛在危險源。這有助于及時發現并處理安全隱患,保障石油和天然氣行業的安全生產。
4. 制造業
在制造業領域,巡線機器人被應用于生產線上的設備巡檢和產品質量檢測。它們能夠沿著生產線自主行進,檢測設備的運行狀態和性能參數。通過機器視覺技術,機器人還能對產品進行外觀檢測和尺寸測量等工作。這有助于及時發現并解決設備故障和產品質量問題,提高生產效率和產品質量。
5. 建筑業
在建筑業中,巡線機器人扮演著重要角色,特別是在大型建筑項目如橋梁、隧道、高樓等的施工和維護階段。這些機器人能夠進入人類難以到達或危險的區域進行巡檢,如檢查鋼結構焊縫的完整性、混凝土結構的強度以及防水層的完好性等。通過高精度傳感器和數據分析,它們能及時發現潛在的結構問題,為工程師提供關鍵數據支持,確保建筑的安全性和耐久性。
此外,巡線機器人還能在建筑物內部進行巡檢,如檢查電梯井、管道井、電纜井等區域的設備狀況。這些機器人通常具備靈活的運動能力,能夠輕松穿越狹窄空間,并進行詳細的視覺和物理檢查,減少了對人工巡檢的依賴,提高了巡檢效率和安全性。
6. 物流業
在物流行業中,巡線機器人被應用于倉庫管理和貨物追蹤。它們可以在倉庫內部自主導航,對貨物進行盤點、分類和定位。通過掃描條形碼或RFID標簽,機器人能夠快速準確地識別貨物信息,并將其上傳至物流管理系統。這不僅提高了倉庫管理的自動化水平,還減少了人為錯誤,提高了物流效率。
此外,巡線機器人還能在運輸過程中進行貨物監控,確保貨物在運輸過程中的安全和完整。它們可以安裝在運輸車輛上,實時檢測車輛的行駛狀態、貨物溫度、濕度等環境參數,并在異常情況下及時發出警報,通知相關人員進行處理。
7. 農業
在農業領域,巡線機器人被用于農田的巡檢和作物生長監測。它們可以沿著預設的路線在田間地頭自主行駛,利用高清攝像頭和光譜傳感器等設備對作物進行拍攝和分析。通過分析作物的生長狀態、葉片顏色、病蟲害情況等數據,機器人能夠為農民提供精準的農事建議,如灌溉、施肥、病蟲害防治等。
此外,巡線機器人還能在農業大棚內進行巡檢,監測溫室內的溫度、濕度、光照等環境參數,確保作物在最佳的生長環境下生長。這有助于提高農作物的產量和品質,減少資源浪費,促進農業可持續發展。
8. 公共安全
在公共安全領域,巡線機器人發揮著不可替代的作用。它們可以被部署在重要場所如機場、火車站、地鐵站等進行巡邏和監控。通過搭載高清攝像頭、紅外熱成像儀等設備,機器人能夠實時捕捉現場畫面并傳輸至監控中心,為安全人員提供實時信息支持。
在災難救援現場,巡線機器人能夠進入危險區域進行偵查和搜救工作。它們能夠穿越廢墟、隧道等復雜地形,利用傳感器探測生命跡象和有害物質濃度等信息,為救援人員提供寶貴的信息支持。此外,機器人還能攜帶必要的救援物資和設備進入災區,為被困人員提供緊急援助。
巡線機器人在多個領域展現出了廣泛的應用前景和巨大的價值。它們通過自主導航、障礙物檢測、數據采集與傳輸等先進技術實現了對目標線路的全面監控與檢測,提高了巡檢效率和安全性。隨著技術的不斷進步和應用場景的不斷拓展,巡線機器人將在更多領域發揮重要作用,為社會的智能化和可持續發展貢獻力量。未來,我們可以期待巡線機器人在技術性能、智能化水平以及與其他系統的集成能力方面取得更大的突破和創新。
四、巡線機器人電路圖
1、使用L293D的巡線機器人電路圖(1)
這里給出了簡單的循線機器人電路,它是使用L293D IC 構建的,它是一個四路高電流半 H 橋驅動器。其設計目的是提供雙向導出電流。
通過使用該電路,您可以構建巡線機器人,而無需任何微控制器或任何程序代碼。
兩個電機連接為 M1 和 M2,這兩個電機將充當左側和右側電機,這些電機的旋轉由 ICL293D 使能輸入 1 和 2 控制,當光強度落在上時,這些電機直接與兩個LDR(光電管)連接LDR變化意味著電機(M1,M2)方向會改變,因此機器人不斷沿著線軌跡移動,使用黑色線作為軌跡。
2、使用L293D的巡線機器人電路圖(2)
如今,巡線機器人非常常見。基本上,這些機器人遵循或運行在特定的黑色線路軌道上。在工業層面,這些機器人有很多實際應用。例如,他們可以輕松執行物料搬運過程。此外,該機器人可以成為一種令人印象深刻的車輛,可以將貨物從一個地方運輸到另一個地方,從而節省時間。我們可以用不同的方式制造這種機器人。它可以通過使用微控制器和 IR 來構建。然而,并不是每個人都理解并執行編程。既然如此,我們就來制作這個機器人,無需編程。因此,在本教程中,我們將“使用 L293D 的巡線機器人”

對于這個項目,首先,您需要繪制黑線軌道。現在,在使用 L293D 的機器人的這條生產線上,我們連接了兩個名為 M1 和 M2 的電機。因此,這兩個電機分別作為左側電機和右側電機工作。 L293D IC 控制這些電機的旋轉。 IC 的使能引腳(引腳 1 和 9)與 LDR 連接。我們都知道LDR的工作原理。當沒有光照射到其上時,電流就會流過電路。換句話說,你可以說LDR電路在黑暗中工作。因此,該機器人可以輕松地跟隨黑光(黑暗)。因此,當落在 LDR 上的光線發生變化時,有線電機就會改變方向。結果,機器人連續地沿著線軌道行駛。
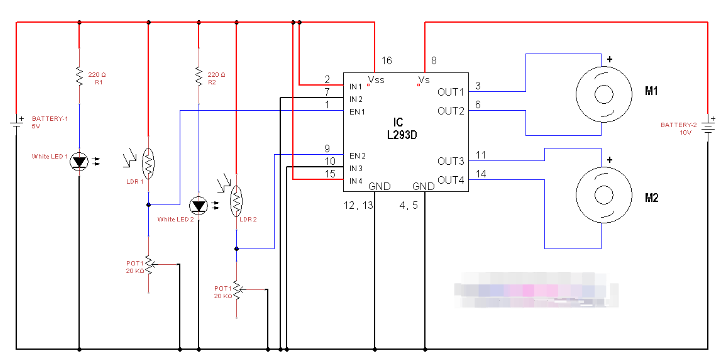
3、使用L293D的巡線機器人電路圖(3)
巡線機器人(通常稱為 LFR)基本上是一種智能設備,可以檢測線路并遵循地板上的路徑。該路徑通常可以是地板上可見的黑線,也可以是具有高對比度顏色的白色地板。 LFR 的基本原理是基于光在表面上的入射。
巡線機器人是最常見的,通常也是學生在學術中制作的第一個基于機器人的項目。巡線機器人的基本工作原理是沿著白色表面上的黑線移動。這意味著黑線作為機器人的軌跡。在這篇文章中,我們使用 IC L293D 來驅動兩個電機。

該機器人的基本原理是沿著黑色膠帶制成的軌道行駛。機器人在驅動器IC L293D驅動的電機的幫助下向前、向左、向右移動。 LDR1和LDR2分別放置在機器人的左側和右側。白色表面反射最大的光,而黑色表面吸收最大的光。因此,當兩個 LDR 檢測到白色表面時,機器人會向前移動,因為 LDR 將允許 EN1 和 EN2 引腳上的電壓通過(高強度光下的低電阻),從而使電機驅動器驅動兩個電機。當左側 LDR (LDR1) 檢測到一條黑線時,其上的光強度非常小。
因此,其電阻變高,使 EN1 處的電壓為零,從而使左側電機停止,因此當只有右側電機運行時,它會自動將機器人轉向左側。當 LDR2 檢測到黑線導致機器人向右轉向使其沿著黑線行駛時,此過程將相同。
4、使用8051微控制器的巡線機器人電路圖
巡線機器人在機器人愛好者和建造者中非常熟悉,因為幾乎每個人都是從這個簡單的項目開始他們的旅程的。不要以它們的簡單性來判斷,這些機器人在工業、機械等領域被證明非常有用。本文將指導您使用 8051 系列 Atmel AT89S52 微控制器構建您的第一個巡線機器人。

該 LFR 使用兩個簡單的紅外傳感器(包括一個紅外 LED 和一個光電二極管)來檢測鋪設在表面上的軌道。由于黑色是紅外光束的良好反射器,因此它會將光束反射回二極管,然后二極管對其進行感應。請注意,此 LFR 邏輯僅適用于鋪設在白色表面上的黑色軌道。
該機器人根據固定在底盤兩側的紅外傳感器發送到處理軌道性質的控制器的反饋信號進行工作。當該紅外傳感器檢測到黑色時,其輸出處于邏輯低 (L) 狀態,反之亦然。 所以在正常情況下(白色地板)傳感器輸出很高。當這兩個傳感器感應到白色表面時,即沒有反射時,機器人就會直線行駛。但是,當左傳感器檢測到白色且右傳感器檢測到黑色軌道時,機器人右轉;當左傳感器檢測到黑色軌道且右傳感器檢測到白色時,機器人左轉。
-
微控制器
+關注
關注
48文章
7645瀏覽量
151855 -
電路圖
+關注
關注
10354文章
10724瀏覽量
532262 -
機器人
+關注
關注
211文章
28627瀏覽量
207953 -
巡線機器人
+關注
關注
0文章
14瀏覽量
6448
發布評論請先 登錄
相關推薦
經典巡線機器人電源系統研究
怎樣設計一個能避開各種障礙物的巡線機器人嗎

設計一個巡線機器人的競賽試題免費下載
如何使用樹莓派制作一個巡線機器人






 工商網監
工商網監
評論