 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
在開發(fā)了基于 Arduino 的拾放機器人之后,這個想法是開發(fā)基于人工智能的線跟隨機器人。在我最近的項目中,開發(fā)一個簡單的線跟隨機器人對初學(xué)者來說是件好事,因為它需要添加某種紅外傳感器而不是伺服電機。“這個想法是在高級水平測試我的技能”。
盡管這是一項艱巨的任務(wù),但某種在線研究對我?guī)椭艽蟆?/font>
為什么需要基于人工智能的線跟隨機器人?
談到人工智能,它是最近的技術(shù),它有可能改變世界環(huán)境,從而影響人類生活。通過將智能賦予我們的機器人以了解現(xiàn)實生活中的問題并相應(yīng)地解決它,這個夢想可以實現(xiàn),這個夢想只能通過人工智能實現(xiàn),這就是為什么每個人都在談?wù)撍?/font>
- 可用于裝配/生產(chǎn)線。
- 載客巴士。
雖然我的原型機器人可能有點智能,但這只是我將項目轉(zhuǎn)向人工智能的開始。因此,在這里,我將嘗試用非常簡單的語言逐步解釋使用人工智能的線跟隨機器人的開發(fā)。由于缺乏資源,我不會構(gòu)建機器人,但我可以很好地解釋如何通過某種研究來構(gòu)建它。我將嘗試提供適用于您的 Arduino IDE 的準(zhǔn)確代碼,以便您可以很容易地開發(fā)出你的第一個人工智能機器人。
你可以從這里支持我在 Patreon 上: http : //bit.ly/31NfQ6A
“您可以在該視頻的描述中找到美國最便宜的費率設(shè)備,只需單擊該視頻。”
現(xiàn)在讓我們來看看項目“基于人工智能的線跟隨機器人!”。
紅外線傳感器的使用
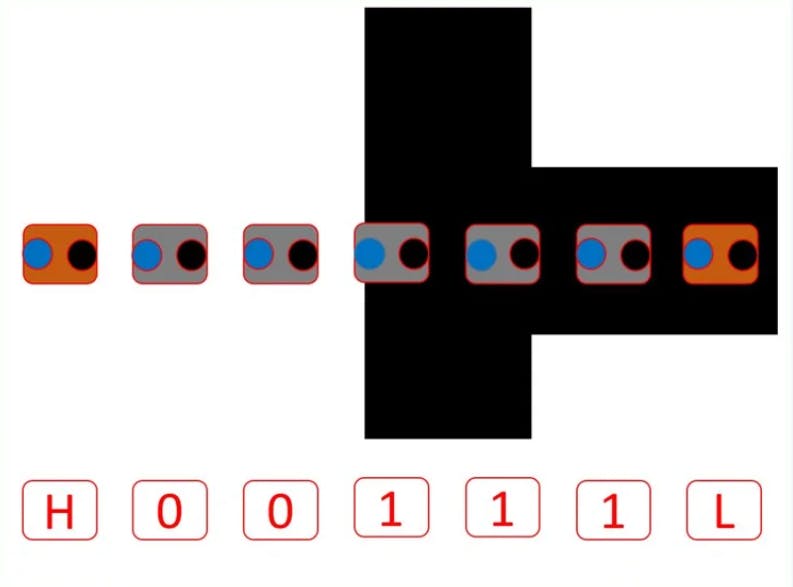
如圖所示,我們的項目包括 7 個紅外傳感器。
5 個 PID 控制傳感器 作用:這 5 個傳感器將分別用于產(chǎn)生高或低 (1, 0) 的數(shù)字輸出。
相對于黑線居中的傳感器只有該傳感器會產(chǎn)生 HIGH(1)。該傳感器的類似可能結(jié)果可能是:-
- 10000
- 11000
- 01000
- 01100
- 00100
- 00110
- 00010
- 00011
- 00001
- 00000
- 11111
現(xiàn)在出現(xiàn)左右可能結(jié)果的其他兩個傳感器是
最左側(cè)傳感器:模擬輸出高或低
最左側(cè)傳感器:模擬輸出高或低
要存儲 5 個傳感器的值,我們需要創(chuàng)建一個數(shù)組變量。
in LFSensor[5]={1,1,1,1,1};
為了存儲左右傳感器的值,我們將使用整數(shù)
int farleft_sensor=0;
正如我們所知,我們有 5 個傳感器可用于存儲機器人在陣列中的左側(cè)和右側(cè)路徑。所以
LFSensor[0] = digitalRead(lineFollowSensor0);
LFSensor[1] = digitalRead(lineFollowSensor1);
LFSensor[2] = digitalRead(lineFollowSensor2);
LFSensor[3] = digitalRead(lineFollowSensor3);
LFSensor[4] = digitalRead(lineFollowSensor4);
farRightSensor = analogRead(farRightSensorPin);
farLeftSensor = analogRead(farLeftSensorPin);
迷宮左手規(guī)則:
觀看 此視頻以了解迷宮左手規(guī)則
簡而言之,左手定則可以描述為:
- 將左手放在墻上。
- 開始往前走
- 在每個十字路口,在整個迷宮中,讓你的左手接觸左邊的墻壁。
- 最終,您將到達(dá)迷宮的盡頭。您可能不會走最短和最直接的方式,但您會到達(dá)那里。
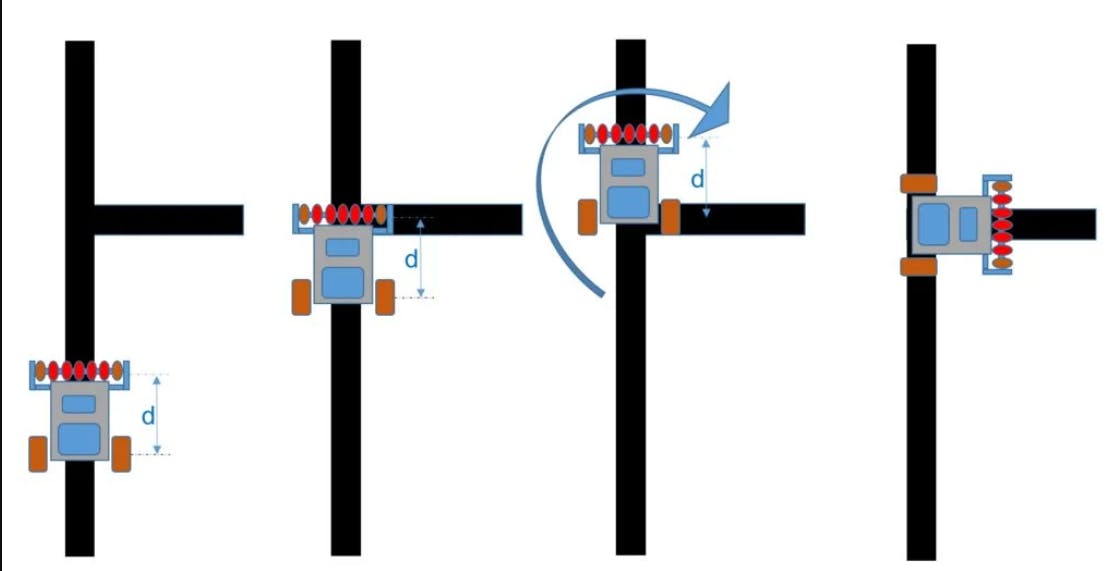
因此,這里的關(guān)鍵是識別交叉口,根據(jù)上述規(guī)則定義要走的路線。具體來說,在我們的 2D 迷宮中,我們可以找到 8 種不同類型的交叉點(見上圖):
看圖,我們可以意識到在路口可能的動作有:
在一個“十字架”
- 向左走,或
- 向右走,或
- 直行
- 在“十字”處向左走,或向右走,或直走
在“ T ”處:
- 向左走,或
- 向右走
- 在“ T ”處:向左走,或向右走
在“僅對”處:
- 向右走
- 在“僅右”處:向右走
在“僅左”處:
- 向左走
- 在“僅左”處:向左走
在“直或左”處:
- 向左走,或
- 直行
- 在“直行或左行”:向左行,或直行
在“直或右”處:
- 向右走,或
- 直行
- 在“直或右”:向右走,或直走
在“死胡同”:
- 返回(“掉頭”)
- 在“死胡同”:返回(“掉頭”)
在“迷宮的盡頭”:
- 停止
- 在“迷宮盡頭”:停止
但是,應(yīng)用“左手規(guī)則”,操作將減少到每個選項:
- 在“十字路口”:向左走
- 在“T”處:向左走
- 在“僅右”處:向右走
- 在“僅限左側(cè)”:向左走
- 在“直行或左行”:向左走
- 在“直行或右行”:直行
- 在“死胡同”:返回(“掉頭”)
- 在“迷宮盡頭”:停止
我們就快到了!“淡定!”
當(dāng)機器人到達(dá)“死角”或“迷宮的盡頭”時,很容易識別它們,因為它們不存在模棱兩可的情況(我們已經(jīng)在 Line Follower Robot 上實現(xiàn)了這些動作,記得嗎?)。問題是當(dāng)機器人找到“LINE”時,例如因為一條線可以是“Cross”(1)或“T”(2)。此外,當(dāng)它到達(dá)“左轉(zhuǎn)或右轉(zhuǎn)”時,可以是簡單的轉(zhuǎn)彎(選項 3 或 4)或直行的選項(5 或 6)。要準(zhǔn)確發(fā)現(xiàn)機器人的交叉路口類型,必須采取額外的步驟:機器人必須運行“額外的英寸”并查看接下來會發(fā)生什么(例如,參見上面的第二張圖片)。
因此,就流程而言,可能的操作現(xiàn)在可以描述為:
在“死胡同”:
- 返回(“掉頭”)
- 在“死胡同”:返回(“掉頭”)
在“LINE”處:
- 多跑一英寸
- 如果有一條線:它是一個“十字”==> 向左轉(zhuǎn)
- 如果沒有線:它是一個“T” ==> Go to LEFT
- 如果還有一行:那就是“迷宮的盡頭”==> STOP
- 在“LINE”處:多跑一英寸如果有一條線:它是“Cross”==> 轉(zhuǎn)到 LEFT如果沒有線:它是一個“T”==> 轉(zhuǎn)到 LEFT如果有另一條線:這是“迷宮的盡頭”==> STOP
在“右轉(zhuǎn)”:
- 多跑一英寸
- 如果有一條線:它是直的或右的 ==> 直走
- 如果沒有線:它是一個 Right Only ==> Go to RIGHT
- 在“右轉(zhuǎn)”處:如果有一條線,則多跑一英寸:它是直行或右行 ==> 直行如果沒有行:它是僅右行 ==> 去右行
在“左轉(zhuǎn)”:
- 多跑一英寸
- 如果有一條線:它是一條直線或 LEFT ==> Go to LEFT
- 如果沒有線:它是一個 LEFT Only ==> Go to LEFT
- 在“左轉(zhuǎn)”處:如果有一條線,則多跑一英寸:它是直線或左 ==> 轉(zhuǎn)到左如果沒有線:它是一個僅左 ==> 轉(zhuǎn)到左
請注意,事實上,如果是“左轉(zhuǎn)”,您可以跳過測試,因為無論如何您都會選擇左轉(zhuǎn)。為了清楚起見,我讓解釋更籠統(tǒng)。在實際代碼中,我將跳過此測試。
?
?
?
?
- 高壓輸電線路巡線機器人智能控制系統(tǒng)
- 物體檢測人工智能機器人
- Arduino巡線機器人
- The Irrigator:人工智能驅(qū)動的灌溉機器人
- 設(shè)計一個巡線機器人的競賽試題免費下載 16次下載
- 設(shè)計基于四旋翼飛行器的巡線機器人電子設(shè)計競賽試題免費下載 16次下載
- 機器人編程C語言與人工智能 0次下載
- 巡線機器人穩(wěn)定成像控制系統(tǒng)設(shè)計_王利華 2次下載
- 高壓巡線四旋翼機器人反步自適應(yīng)控制的研究_藍(lán)益鵬 0次下載
- 高壓輸電線路除冰機器人抓線運動控制 6次下載
- 基于仿生原理的架空輸電線路巡線機器人越障模型 49次下載
- 架空電力線路巡線機器人分析探討 38次下載
- 基于PC104的巡線機器人控制系統(tǒng)設(shè)計
- 110KV輸電線路巡線機器人控制方法及實現(xiàn)
- 基于PC104的巡線機器人控制系統(tǒng)設(shè)計
- 人工智能與機器人的區(qū)別 694次閱讀
- 巡線機器人電路圖 巡線機器人的工作原理和應(yīng)用領(lǐng)域 545次閱讀
- 發(fā)現(xiàn)更多機器人開發(fā)技巧 AI與邊緣計算加持 638次閱讀
- 如何使用樹莓派制作一個巡線機器人 5577次閱讀
- 微雪電子人工智能開發(fā)套件AI計算機介紹 903次閱讀
- dfrobot麥昆編程機器人小車巡線地圖簡介 3695次閱讀
- 基于51單片機的自動巡線輪式機器人控制系統(tǒng) 4138次閱讀
- 盤點2018年機器人領(lǐng)域十大技術(shù) 3312次閱讀
- 人工智能帶給實際的作用 1.3w次閱讀
- 人與機器人的自然交互 5066次閱讀
- 機器人是智能制造要角 新漢計劃在16所院校開設(shè)「機器人學(xué)」 1004次閱讀
- 人工智能AI在機器人運動控制領(lǐng)域盤點簡介 6825次閱讀
- 工業(yè)機器人和人工智能的區(qū)別詳細(xì)概述 8074次閱讀
- 人工智能之機器學(xué)習(xí)與深度學(xué)習(xí)介紹 837次閱讀
- 在軟件測試行業(yè)中機器人和人工智能到底承擔(dān)著什么重任 2364次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1美的電磁爐維修手冊大全
- 1.56 MB | 5次下載 | 5 積分
- 2SMD LED選型手冊 貼片燈珠
- 5.47 MB | 3次下載 | 免費
- 3基于PLC的拉絲機張力控制系統(tǒng)研究
- 0.14 MB | 2次下載 | 5 積分
- 4加密芯片的一種破解方法和對應(yīng)加密方案改進(jìn)設(shè)計
- 0.29 MB | 1次下載 | 免費
- 5萬用表UT58A原理圖
- 0.09 MB | 1次下載 | 5 積分
- 6多功能MPU芯片GC9005數(shù)據(jù)手冊
- 2.67 MB | 1次下載 | 免費
- 7面向NXP i.MX8處理器的電源解決方案
- 47.47KB | 次下載 | 免費
- 8LP8733-Q1和LP8732-Q1為DRA78x和TDA3x供電的用戶指南
- 61.31KB | 次下載 | 免費
本月
- 1使用單片機實現(xiàn)七人表決器的程序和仿真資料免費下載
- 2.96 MB | 44次下載 | 免費
- 2UC3842/3/4/5電源管理芯片中文手冊
- 1.75 MB | 20次下載 | 免費
- 3華瑞昇CR216芯片數(shù)字萬用表規(guī)格書附原理圖及校正流程方法
- 0.74 MB | 14次下載 | 3 積分
- 4DMT0660數(shù)字萬用表產(chǎn)品說明書
- 0.70 MB | 13次下載 | 免費
- 53314A函數(shù)發(fā)生器維修手冊
- 16.30 MB | 13次下載 | 免費
- 6TPS54202H降壓轉(zhuǎn)換器評估模塊用戶指南
- 1.02MB | 9次下載 | 免費
- 7STM32F101x8/STM32F101xB手冊
- 1.69 MB | 8次下載 | 1 積分
- 8感應(yīng)筆電路圖
- 0.06 MB | 7次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935119次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計
- 1.48MB | 420062次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233084次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191367次下載 | 10 積分
- 5十天學(xué)會AVR單片機與C語言視頻教程 下載
- 158M | 183335次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81581次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費下載
- 0.02 MB | 73807次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65987次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論