 【GD32F303紅楓派開發板使用手冊】第十八講 USART-485通信實驗
【GD32F303紅楓派開發板使用手冊】第十八講 USART-485通信實驗
18.1實驗內容
通過本實驗主要學習以下內容:
- 485工作原理
- 串口單線工作原理
18.2實驗原理
18.2.1485工作原理
485一般指RS485。RS485名TIA-485-A, ANSI/TIA/EIA-485或TIA/EIA-485,是由電信業協會和電業聯盟定義。RS485就是個硬件通信協議,它規定當兩線間電壓差為+2V ~ +6V時為邏輯“1”,電壓差為-2V ~ -6V時為邏輯“0”
RS-485的特點:由于485信號是利用差模傳輸的,即由485+與485-的電壓差來作為信號傳輸。如果外部有個擾源對其進行干擾,使雙絞線進行485信號傳輸的時候,由于其雙絞,干擾對于485+,485-的干擾效果都是樣的,那電壓差依然是不變的,對于485信號的干擾縮到了最小。同樣的道理,如果有屏蔽線起到屏蔽作的話,外部擾源對于其的擾影響也可以盡可能的縮小。
485布線規范是必須要牽的布線,旦沒有借助485集線器和485中繼器直接布設成星型連接和樹形連接,很容易造成信號反射導致總線不穩定。
485總線必須要單點可靠接地。單點就是整個485總線上只能是有個點接地,不能多點接地,因為將其接地是因為要將地線(般都是屏蔽線作地線)上的電壓保持致,防止共模擾,如果多點接地適得其反。
RS-485 與MCU
MCU的輸出和讀取都是TTL電平,一般情況下由地線和信號線組成,在遠距離傳輸的情況下,信號線上的干擾信號會隨著有效信號被傳遞到接收端,使得通信容易被干擾。 與之相對的,485協議輸出的是差分信號,經過TTL轉485芯片的轉換后其有效信息為兩條信號線的電壓差,即可大大消除通信時的共模干擾,同時由于其傳遞的信息隨時可以在硬件層面上被測量,而且整個轉換過程完全為硬件操作,無需軟件編寫,因此是種硬件協議。
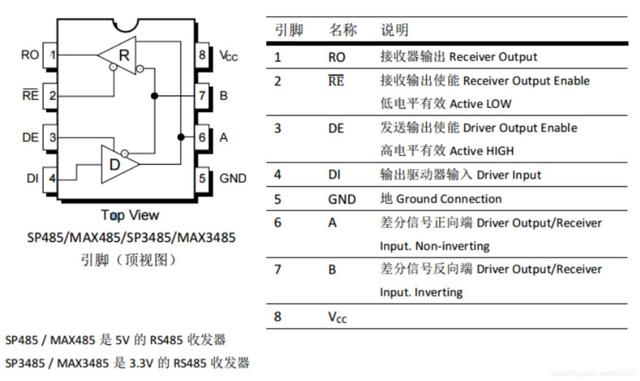
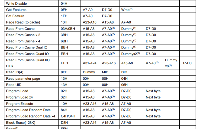
TTL-485轉換器的真值表
實際操作時,芯片的接收器輸出端RO與單片機的Rx相連,驅動器輸端DI則與單片機的Td相連
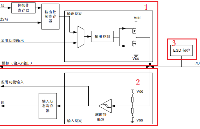
驅動器的輸出邏輯
485芯片既有全雙通信,也有半雙工通信,如果485為半雙工通信模式,其在發送信息時便無法讀取信息,因此當DE被拉高時完全處于發送信息的狀態,此時DI接受單片機寫入的數字信號,當輸信號DI為1時輸出正的差分信號,即A-B>0.2V。當輸信號DI為0時輸出負差分信號,即B-A>-0.2V(有些芯片是0.3V,如SP3485)
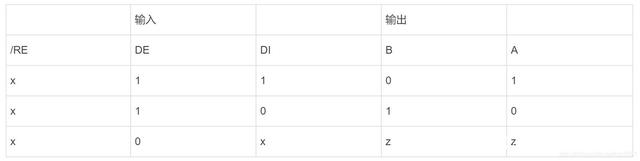
當DE被拉低時,依據/RE(低電平有效)的電平判斷作狀態,當/RE為高時,整個器件不工作,輸出高阻態,當其在低電平下使能時,則由輸的AB差分信號向RO輸出0或1。
18.2.2串口單線工作原理
本實驗中,我們使用串口的TX線同時實現發送和接受的功能。
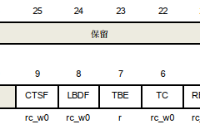
通過設置USART_CTL2寄存器的HDEN位,可以使能單線模式。在單線模式下,TX引腳和RX引腳將從內部連接到一起,RX引腳不再使用。TX引腳應該被配置為開漏輸出模式。通信沖突由軟件處理。當發送時,需要關閉串口接受功能,打開發送功能;當接受時,需要關閉串口發送功能,打開接受功能。
18.3硬件設計
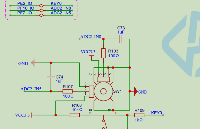
紅楓派開發板485硬件設計如下:
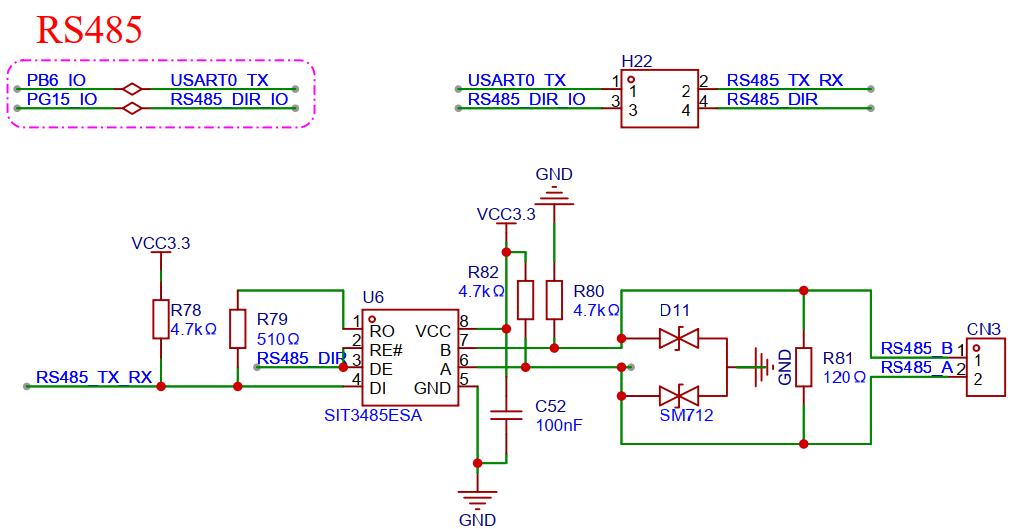
即使用PB6實現發送和接收,使用PG15用來控制485傳輸方向。
18.4代碼解析
18.4.1485發送函數
在bsp_uart.c中,定義了485發送函數:
C void bsp_rs485_uart_transmit(uint8_t *pbuff,uint16_t length) { uint32_t timeout = driver_tick; while(BOARD_UART.uart_control.Com_Flag.Bits.RecState==1 && BOARD_UART.uart_control.RecCount!=0){ if((timeout+UART_TIMEOUT_MS) <= driver_tick) { BOARD_UART.uart_control.Com_Flag.Bits.RecState=0; } } driver_gpio_pin_set(&RS485_DIR); usart_receive_config(BOARD_UART.uart_x, USART_RECEIVE_DISABLE); usart_transmit_config(BOARD_UART.uart_x, USART_TRANSMIT_ENABLE); if(BOARD_UART.uart_mode_tx==MODE_DMA) { driver_uart_dma_transmit(&BOARD_UART,pbuff,length); } else if(BOARD_UART.uart_mode_tx==MODE_INT) { driver_uart_int_transmit(&BOARD_UART,pbuff,length); } else if(BOARD_UART.uart_mode_tx==MODE_POLL) { driver_uart_poll_transmit(&BOARD_UART,pbuff,length); usart_receive_config(BOARD_UART.uart_x, USART_RECEIVE_ENABLE); usart_transmit_config(BOARD_UART.uart_x, USART_TRANSMIT_DISABLE); driver_gpio_pin_reset(&RS485_DIR); } }
18.4.2485接受函數
在bsp_uart.c中定義了485接受函數:
C void bsp_rs485_uart_receive(uint8_t *pbuff,uint16_t length) { uint32_t timeout = driver_tick; while(BOARD_UART.uart_control.Com_Flag.Bits.SendState==1){ if((timeout+UART_TIMEOUT_MS) <= driver_tick) { BOARD_UART.uart_control.Com_Flag.Bits.SendState=0; } } usart_receive_config(BOARD_UART.uart_x, USART_RECEIVE_ENABLE); usart_transmit_config(BOARD_UART.uart_x, USART_TRANSMIT_DISABLE); driver_gpio_pin_reset(&RS485_DIR); if(BOARD_UART.uart_mode_rx==MODE_DMA) { driver_uart_dma_receive(&BOARD_UART,pbuff,length); } else if(BOARD_UART.uart_mode_rx==MODE_INT) { driver_uart_int_receive(&BOARD_UART,pbuff,length); } else if(BOARD_UART.uart_mode_rx==MODE_POLL) { driver_uart_poll_receive(&BOARD_UART,pbuff,length); } }
18.4.3main函數實現
以下為main函數代碼:
C int main(void) { delay_init(); //初始化UART為中斷模式,注冊接受完成(IDLE)回調函數 BOARD_UART.uart_mode_tx=MODE_DMA; BOARD_UART.uart_mode_rx=MODE_DMA; BOARD_UART.uart_idle_callback=user_receive_complete_callback; bsp_rs485_uart_init(); nvic_irq_enable(USART0_IRQn,2,0); delay_ms(1000); //配置UART接受,最長100byte bsp_rs485_uart_receive(uart_rec_buff,100); while (1) { //查詢到接受完成回調函數標志 if(uart_receive_complete_flag==SET) { uart_receive_complete_flag=RESET; //發送剛接受到的數據 bsp_rs485_uart_transmit(uart_rec_buff,uart_receive_count); } } }
本例程main函數首先進行了延時函數初始化,再初始化485為中斷模式,接著配置串口BOARD_UART,開啟串口中斷NVIC,這里使用到了IDLE中斷,然后配置485接受(DMA方式),最長100個字節,所以我們可以給485發送100個字節以下長度的數據。在while(1)循環中循環查詢uart_receive_complete_flag標志位,當該標志位為“SET”時,表示IDLE中斷被觸發,一幀數據接受完,最后將接收到的幀數據通過DMA發送方式原封不動發送到485上。
18.5實驗結果
使用USB轉485轉接線,將A、B線接好,使用串口調試助手發送一幀數據到MCU,MCU會將這幀數據回發到串口調試助手中。
-
單片機
+關注
關注
6039文章
44574瀏覽量
636319 -
開發板
+關注
關注
25文章
5080瀏覽量
97678 -
USART
+關注
關注
1文章
195瀏覽量
30895 -
GD32
+關注
關注
7文章
404瀏覽量
24382
發布評論請先 登錄
相關推薦
STM32CUBEMX開發GD32F303(8)----USART收發配置
STM32CUBEMX開發GD32F303(9)----USART通過DMA收發

【星空派GD32F303開發板試用體驗】開箱+環境搭建
【星空派GD32F303開發板試用體驗】開箱+環境搭建
【星空派GD32F303開發板試用體驗】+板卡概覽
GD32F303開發板介紹
STM32CUBEMX開發GD32F303(14)----IIC之配置OLED
GD32F303固件庫開發
【GD32F303紅楓派開發板使用手冊】第二講 GPIO-流水燈實驗
【GD32F303紅楓派開發板使用手冊】第三講 GPIO-按鍵查詢檢測實驗
【GD32F303紅楓派開發板使用手冊】第五講 FMC-片內Flash擦寫讀實驗

【GD32F303紅楓派開發板使用手冊】第十六講 USART-DMA串口收發實驗
【GD32F303紅楓派開發板使用手冊】第二十講 SPI-SPI NAND FLASH讀寫實驗





 工商網監
工商網監
評論