 工業機器人控制系統的基本組成有哪些
工業機器人控制系統的基本組成有哪些
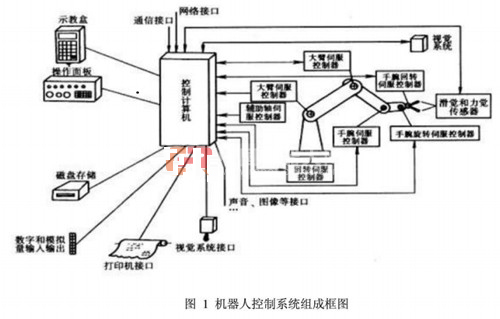
工業機器人控制系統是工業機器人的大腦,它負責接收輸入信號、處理信息、控制機器人的運動和執行任務。一個完整的工業機器人控制系統通常包括以下幾個基本組成部分:
- 傳感器系統 :
- 位置傳感器 :用于檢測機器人關節的角度位置。
- 速度傳感器 :測量機器人關節的旋轉速度。
- 力/力矩傳感器 :檢測機器人末端執行器與環境的交互力。
- 視覺傳感器 :提供機器人對環境的視覺感知能力。
- 執行器系統 :
- 控制器 :
- 軟件系統 :
- 人機交互界面 :
- 操作面板 :提供物理按鈕和觸摸屏,用于手動控制機器人。
- 計算機界面 :通過計算機軟件進行編程和監控機器人狀態。
- 通信系統 :
- 內部通信 :控制器內部各組件之間的數據交換。
- 外部通信 :與其他設備或系統(如PLC、CNC等)的數據交換。
- 安全系統 :
- 緊急停止 :在緊急情況下快速停止機器人運動。
- 安全傳感器 :檢測機器人周圍環境,防止碰撞或傷害。
- 電源管理 :
- 機械結構 :
- 機器人本體 :包括機器人的骨架、關節和末端執行器。
- 傳動機構 :將電機的動力傳遞到機器人關節。
- 輔助系統 :
- 冷卻系統 :保持機器人在適宜的溫度下工作。
- 潤滑系統 :減少機器人關節的摩擦和磨損。
深入解析
傳感器系統
傳感器系統是工業機器人的感知器官,它們提供關于機器人狀態和環境的實時數據。位置傳感器通常采用光電編碼器或磁性編碼器,它們能夠提供高精度的位置反饋。速度傳感器可以是增量式或絕對式,用于檢測和控制機器人的運動速度。力/力矩傳感器對于需要精細操作或與人協作的機器人尤為重要。視覺傳感器可以是2D或3D,用于物體識別、定位和測量。
執行器系統
執行器系統是機器人的動力源,通常由電機和其驅動器組成。電機可以是步進電機、伺服電機或直流電機,每種電機都有其特定的應用場景和優勢。電機驅動器負責接收控制器的指令,并將其轉換為電機的精確運動。
控制器
控制器是工業機器人的大腦,它負責處理傳感器數據、執行程序指令和控制機器人的運動。控制器的CPU需要有足夠的計算能力來處理復雜的算法和大量數據。輸入/輸出接口用于連接傳感器、執行器和其他外圍設備。存儲器則用于存儲程序和數據,保證機器人在斷電后能夠恢復工作狀態。
軟件系統
軟件系統是工業機器人的智能核心,它包括操作系統、編程語言、開發環境、運動控制算法和任務規劃軟件。操作系統負責管理計算機硬件資源,提供軟件運行環境。編程語言和開發環境使得開發者能夠編寫和測試機器人控制程序。運動控制算法負責規劃和執行機器人的運動路徑,而任務規劃軟件則定義機器人需要完成的任務和操作序列。
人機交互界面
人機交互界面是操作人員與機器人交互的橋梁。操作面板提供物理按鈕和觸摸屏,用于手動控制機器人。計算機界面則通過軟件進行編程和監控機器人狀態,使得操作人員可以方便地設置參數、監控機器人的工作狀態和進行故障診斷。
通信系統
通信系統負責機器人內部各組件之間的數據交換,以及與其他設備或系統的數據交換。內部通信通常采用高速總線技術,如EtherCAT或CANopen。外部通信則可能涉及到工業以太網、串行通信或無線通信技術。
安全系統
安全系統是保護操作人員和設備的重要部分。緊急停止功能可以在緊急情況下快速停止機器人運動。安全傳感器則用于檢測機器人周圍環境,防止碰撞或傷害。
-
控制系統
+關注
關注
41文章
6633瀏覽量
110679 -
工業機器人
+關注
關注
91文章
3369瀏覽量
92725 -
電信號
+關注
關注
1文章
822瀏覽量
20609 -
輸入信號
+關注
關注
0文章
459瀏覽量
12582
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論