") 伺服電機(jī)位置模式和速度模式的區(qū)別
伺服電機(jī)位置模式和速度模式的區(qū)別
一、引言
伺服電機(jī)作為現(xiàn)代工業(yè)自動化領(lǐng)域中的核心動力裝置,其控制模式的選擇對于整個系統(tǒng)的性能有著至關(guān)重要的影響。在伺服電機(jī)的控制模式中,位置模式和速度模式是最為常見的兩種。本文將對這兩種模式進(jìn)行詳細(xì)的對比分析,以幫助讀者更好地理解它們的區(qū)別,并為實際應(yīng)用中的選擇提供指導(dǎo)。
二、伺服電機(jī)位置模式分析
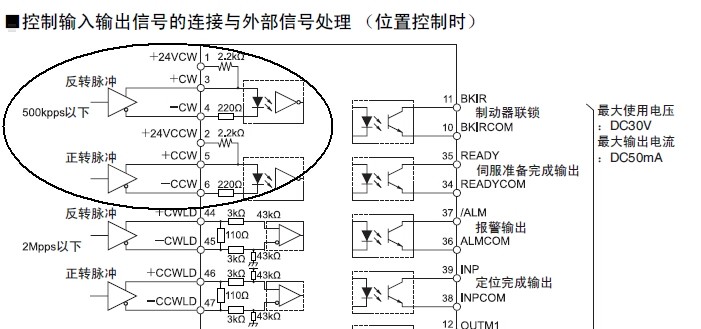
位置模式是指伺服電機(jī)按照預(yù)設(shè)的位置進(jìn)行旋轉(zhuǎn),并在到達(dá)目標(biāo)位置后停止。這種模式下,伺服電機(jī)通過接收脈沖信號來進(jìn)行位置控制,脈沖的個數(shù)決定了電機(jī)的轉(zhuǎn)動角度,脈沖的頻率決定了電機(jī)的轉(zhuǎn)動速度。位置模式通常用于需要高精度定位和控制的場合,如數(shù)控機(jī)床、自動化生產(chǎn)線等。
特點
(1)高精度:位置模式通過精確的脈沖控制實現(xiàn)電機(jī)的轉(zhuǎn)動角度和速度,因此具有較高的定位精度。
(2)穩(wěn)定性好:在位置模式下,伺服電機(jī)可以精確地到達(dá)目標(biāo)位置并保持穩(wěn)定,不易受到外部干擾的影響。
(3)控制方式簡單易懂:位置模式的控制原理較為直觀,容易理解和操作。
優(yōu)缺點
(1)優(yōu)點:位置模式具有高精度、穩(wěn)定性好、控制方式簡單易懂等優(yōu)點,適用于需要高精度定位和控制的場合。
(2)缺點:位置模式的控制響應(yīng)時間相對較慢,不適用于需要快速反應(yīng)的場景。此外,位置模式的控制成本相對較高,需要配備高性能的伺服驅(qū)動器和編碼器。
三、伺服電機(jī)速度模式分析
工作原理
速度模式是指伺服電機(jī)按照預(yù)設(shè)的速度進(jìn)行旋轉(zhuǎn),這種模式下電機(jī)不會停下來,除非外部干擾或指令改變。速度模式通常通過模擬量的輸入或脈沖的頻率來進(jìn)行控制,以實現(xiàn)電機(jī)的穩(wěn)定運動。速度模式適用于需要長時間穩(wěn)定運轉(zhuǎn)的應(yīng)用場景,如輸送機(jī)、轉(zhuǎn)盤等。
特點
(1)響應(yīng)速度快:速度模式具有較快的響應(yīng)速度,能夠在較短時間內(nèi)實現(xiàn)電機(jī)的速度調(diào)節(jié)。
(2)控制范圍廣:速度模式可以實現(xiàn)寬范圍的速度調(diào)節(jié),以滿足不同應(yīng)用場合的需求。
(3)適應(yīng)性強(qiáng):速度模式對于負(fù)載的變化具有較強(qiáng)的適應(yīng)性,能夠在一定程度上抵抗外部干擾的影響。
優(yōu)缺點
(1)優(yōu)點:速度模式具有響應(yīng)速度快、控制范圍廣、適應(yīng)性強(qiáng)等優(yōu)點,適用于需要長時間穩(wěn)定運轉(zhuǎn)的應(yīng)用場景。
(2)缺點:速度模式在高扭矩負(fù)載下容易出現(xiàn)控制失效的情況,且對于電機(jī)的動態(tài)性能要求較高。此外,速度模式的控制成本也相對較高。
四、位置模式與速度模式的區(qū)別
控制目標(biāo)不同
位置模式的控制目標(biāo)是電機(jī)的轉(zhuǎn)動角度和位置,適用于需要精確定位和控制的場合;而速度模式的控制目標(biāo)是電機(jī)的轉(zhuǎn)動速度,適用于需要實現(xiàn)長時間穩(wěn)定運轉(zhuǎn)的應(yīng)用場景。
控制方式不同
位置模式通過精確的脈沖控制實現(xiàn)電機(jī)的轉(zhuǎn)動角度和速度,控制方式較為直觀;而速度模式通常通過模擬量的輸入或脈沖的頻率來進(jìn)行控制,實現(xiàn)電機(jī)的穩(wěn)定運動。
響應(yīng)速度不同
位置模式的控制響應(yīng)時間相對較慢,不適用于需要快速反應(yīng)的場景;而速度模式具有較快的響應(yīng)速度,能夠在較短時間內(nèi)實現(xiàn)電機(jī)的速度調(diào)節(jié)。
適用范圍不同
位置模式適用于需要高精度定位和控制的場合,如數(shù)控機(jī)床、自動化生產(chǎn)線等;而速度模式適用于需要長時間穩(wěn)定運轉(zhuǎn)的應(yīng)用場景,如輸送機(jī)、轉(zhuǎn)盤等。
五、結(jié)論
綜上所述,伺服電機(jī)的位置模式和速度模式各有特點,適用于不同的應(yīng)用場景。在選擇時,應(yīng)根據(jù)具體需求和場景特點進(jìn)行選擇,以確保系統(tǒng)的高性能和穩(wěn)定性。同時,隨著技術(shù)的不斷發(fā)展和創(chuàng)新,伺服電機(jī)的控制模式也將不斷完善和優(yōu)化,為工業(yè)自動化領(lǐng)域的發(fā)展提供更加強(qiáng)大的支持。
-
伺服電機(jī)
+關(guān)注
關(guān)注
85文章
2057瀏覽量
58061 -
工業(yè)自動化
+關(guān)注
關(guān)注
17文章
2466瀏覽量
67328
發(fā)布評論請先 登錄
相關(guān)推薦
伺服電機(jī)系統(tǒng)控制中的轉(zhuǎn)矩模式和速度模式介紹
AD2S1210并行端口配置模式下讀取電機(jī)位置遇到的問題求解
伺服電機(jī)的三種控制場景模式
伺服電機(jī)的三種運行模式和方法
帶按鈕的Arduino控制伺服電機(jī)位置






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論