關(guān)于伺服位置控制模式往復(fù)運動中,在換向時響聲大,機(jī)械震動如何消除?
設(shè)備要求換向時越快越好,不能以降低機(jī)械剛性為代價。
有經(jīng)驗的兄弟指點一二啊!
2023-12-11 06:49:10
實驗11伺服電機(jī)控制器設(shè)計實驗了解伺服電機(jī)的應(yīng)用領(lǐng)域,掌握伺服電機(jī)的速度控制模式、伺服電機(jī)的位置控制模式。文章目錄程序設(shè)計伺服電機(jī)的速度控制模式代碼講解main.ctimer.c伺服電機(jī)的位置控制
2021-06-28 08:59:56
【不懂就問】伺服電機(jī)的控制,典型分為三個環(huán),位置環(huán)、速度環(huán)、電流環(huán)其中涉及的一個控制參數(shù)“位置前饋增益”怎么理解
2018-07-24 08:41:25
引言:伺服的控制術(shù)語有很多:閉環(huán)控制、半閉環(huán)控制、開環(huán)控制,速度環(huán)、電流環(huán)、位置環(huán),很多朋友相信沒有弄清楚,今天就為大家詳細(xì)解答一下,伺服的控制模式是怎樣的?該怎樣系統(tǒng)的掌握這一塊? 控制系統(tǒng)的控制
2018-10-11 10:29:54
伺服電機(jī)速度環(huán)、位置環(huán)、扭矩環(huán)的控制原理是什么?
2021-09-29 06:14:41
您好,我使用PSoC 5LP,但我不能控制我的伺服電機(jī)MG 995的速度,我該怎么控制它呢? 以上來自于百度翻譯 以下為原文hello i use the psoc 5LPbut i can't
2018-10-26 15:39:21
周期同步位置模式(csp)周期同步位置模式下,上位控制器完成位置指令規(guī)劃,然后將規(guī)劃好的目標(biāo)位置 607Ah 上以周期性同步的方式發(fā)送給伺服驅(qū)動器,位置、速度、轉(zhuǎn)矩控制由伺服驅(qū)動器內(nèi)部完成 周期同步速度
2021-06-28 06:55:46
周期同步位置模式(csp)周期同步位置模式下,上位控制器完成位置指令規(guī)劃,然后將規(guī)劃好的目標(biāo)位置 607Ah 上以周期性同步的方式發(fā)送給伺服驅(qū)動器,位置、速度、轉(zhuǎn)矩控制由伺服驅(qū)動器內(nèi)部完成周期同步速度
2021-06-27 06:18:31
運動伺服一般都是三環(huán)控制系統(tǒng),從內(nèi)到外依次是電流環(huán)、速度環(huán)和位置環(huán)。1、首先電流環(huán):電流環(huán)的輸入是速度環(huán)PID調(diào)節(jié)后的那個輸出,我們稱為“電流環(huán)給定”吧,然后呢就是電流環(huán)的這個給定和“電流環(huán)的反饋
2021-06-28 09:55:36
伺服電機(jī)三環(huán)控制是什么原理?影響伺服電機(jī)控制的因素是什么?伺服電機(jī)電流環(huán)、速度環(huán)和位置環(huán)之間是什么關(guān)系?
2021-09-28 08:00:59
轉(zhuǎn)矩模式。如果對位置和速度有一定的精度要求,而對實時轉(zhuǎn)矩不是很關(guān)心,用轉(zhuǎn)矩模式不太方便,用速度或位置模式比較好。如果上位控制器有比較好的閉環(huán)控制功能,用速度控制效果會好一點。如果本身要求不是很高,或者
2018-10-26 10:51:18
伺服系統(tǒng)控制電機(jī)速度靠速度環(huán);電機(jī)的速度,直流電機(jī)決定電壓的高低,交流電機(jī)決定頻率的高低;所以速度環(huán)的調(diào)節(jié)器輸出端控制的是交流電機(jī)的頻率,或者是控制著直流電機(jī)的電壓;速度環(huán)是如何檢測電機(jī)速度
2018-10-12 10:36:47
、位置都沒有要求,只要輸出一個恒轉(zhuǎn)矩,當(dāng)然是用轉(zhuǎn)矩模式。如果對位置和速度有一定的精度要求,而對實時轉(zhuǎn)矩不是很關(guān)心,用速度或位置模式比較好。如果上位控制器有比較好的閉環(huán)控制功能,用速度控制效果會好一點
2018-11-02 09:40:43
的速度、位置都沒有要求,只要輸出一個恒轉(zhuǎn)矩,當(dāng)然是用轉(zhuǎn)矩模式。如果對位置和速度有一定的精度要求,而對實時轉(zhuǎn)矩不是很關(guān)心,用速度或位置模式比較好。如果上位控制器有比較好的閉環(huán)控制功能,用速度控制效果會好一點
2020-07-01 07:00:00
、位置都沒有要求,只要輸出一個恒轉(zhuǎn)矩,當(dāng)然是用轉(zhuǎn)矩模式。如果對位置和速度有一定的精度要求,而對實時轉(zhuǎn)矩不是很關(guān)心,用速度或位置模式比較好。如果上位控制器有比較好的閉環(huán)控制功能,用速度控制效果會好一點
2018-11-01 10:59:41
Mode):顧名思義,用于尋零輪廓位置模式(Profile Position Mode):上位機(jī)給定目標(biāo)絕對/相對位置、速度、加減速參數(shù),伺服內(nèi)部的軌跡發(fā)生器根據(jù)以上參數(shù)生成目標(biāo)位置曲線指令,經(jīng)由驅(qū)動器內(nèi)部實現(xiàn)三環(huán)控制輪廓速度模式(Profile Velocity Mode):上位機(jī)給定目標(biāo)速度
2021-06-27 06:41:51
當(dāng)應(yīng)用場景需要精確的控制位置、速度及扭矩(或兩者結(jié)合)時,一般使用伺服電機(jī)系統(tǒng)。根據(jù)所控制的參數(shù),伺服電機(jī)系統(tǒng)可以在轉(zhuǎn)矩模式、速度模式或位置模式下運行。每種模式都需要控制回路,這些回路受到伺服
2023-03-10 10:03:48
伺服驅(qū)動器按照其控制對象由外到內(nèi)分為位置環(huán)、速度環(huán)和電流環(huán),相應(yīng)伺服驅(qū)動器也就可以工作在位置控制模式、速度控制模式和力矩控制模式。
2019-11-05 09:01:59
伺服系統(tǒng)是如何控制電機(jī)速度的?速度環(huán)是如何檢測電機(jī)速度的?
2021-10-11 08:11:34
伺服電機(jī)工作在扭矩模式下,myrio實現(xiàn)速度環(huán)和位置環(huán)。在速度環(huán),用微分控制消除震蕩,用積分控制消除靜差。效果非常好。由于速度環(huán)已經(jīng)很精確,位置環(huán)只用了P控制。歡迎學(xué)習(xí)PID的同學(xué)一起討論
2022-05-05 22:02:42
控制板:NUCLEO-F303RE電源板:NUCLEO-IHM07M1無刷電機(jī)、編碼器我在位置模式下工作正常,但我切換到速度模式,它不起作用,我仍然在位置模式下工作,在代碼中,我試圖執(zhí)行MC_ProgramSpeedRampMotor1 0 (600/6100);但是沒有成功,為什么??
2023-01-30 08:41:38
的速度、位置都沒有要求,只要輸出一個恒轉(zhuǎn)矩,當(dāng)然是用轉(zhuǎn)矩模式。● 如果對位置和速度有一定的精度要求,而對實時轉(zhuǎn)矩不是很關(guān)心,用速度或位置模式比較好。● 如果上位控制器有比較好的閉環(huán)控制功能,用速度控制
2018-07-11 11:53:19
電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。速度控制一般都是有變頻器實現(xiàn),用伺服電機(jī)做速度控制,一般是用于快速加減速或是速度精準(zhǔn)控制的場合,因為相對于變頻器,伺服電機(jī)可以在幾毫...
2021-09-06 06:00:20
1、實現(xiàn)模式:通過QD77MS模塊(2,4,16都可以)實現(xiàn)軸的速度控制模式,軸配置如下2、相關(guān)指令說明:常用的有位置控制、速度控制、力矩控制模式,可通過指令切換。要學(xué)會看手冊。以1軸為例,U0
2021-06-28 09:14:20
伺服電機(jī)工作在扭矩模式下,myrio實現(xiàn)速度環(huán)和位置環(huán)。在速度環(huán),用微分控制消除震蕩,用積分控制消除靜差。效果非常好。由于速度環(huán)已經(jīng)很精確,位置環(huán)只用了P控制。歡迎學(xué)習(xí)PID的同學(xué)一起討論
2022-05-05 22:19:26
一般伺服驅(qū)動器速度環(huán)增益與位置環(huán)增益是空載時候大,還是帶負(fù)載時候大些?謝謝
2023-12-12 07:29:18
三菱DPLSY指令伺服接線無法進(jìn)行速度控制是為什么?
2021-10-12 07:49:10
使用AD2S1210并行讀取角度和速度,在普通模式下讀取位置和速度,出現(xiàn)如下問題:
1.位置讀取完全正確,在電機(jī)不轉(zhuǎn)時,速度寄存器的值卻在-1和768之間跳變。
請問這是怎么回事,位置讀取正確,速度卻出現(xiàn)問題?
2023-11-20 07:14:18
:set of set-point關(guān)節(jié)伺服控制,輪廓位置模式是最常用的模式,用于從一個點運動到另一個點(point to point),其也是控制模式中比較復(fù)雜的模式。該模式包含了兩個部分,軌跡規(guī)劃器
2021-06-28 07:07:53
速度的閉環(huán)控制。現(xiàn)代數(shù)字直流伺服控制則采用高速數(shù)字信號處理器(DSP),直接對速度和電流信號進(jìn)行采樣,通過軟件實現(xiàn)數(shù)字比較、數(shù)字調(diào)節(jié)運算(數(shù)字濾波)、數(shù)字脈寬調(diào)制等各種功能,從而實現(xiàn)對速度的精確控制
2019-07-10 07:52:50
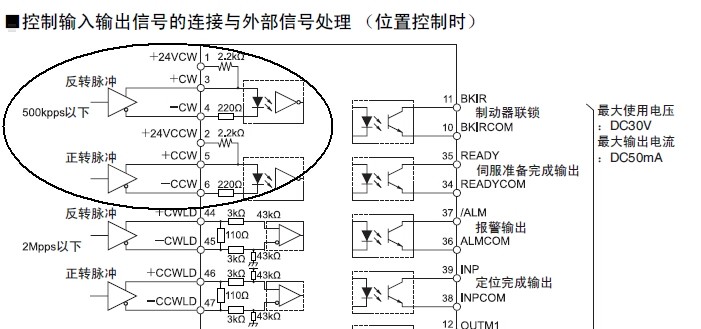
如何利用伺服電機(jī)的指令脈沖加方向位置控制模式實現(xiàn)精確位置控制?
2021-09-27 06:58:37
如何通過寫PWM程序來控制交流伺服電機(jī)的速度,就是說PWM的占空比還是頻率影響交流伺服電機(jī)的速度?如果是占空比影響速度,那么頻率影響什么,需要什么樣的頻率?
2023-04-10 11:52:15
怎樣用串口通信去控制伺服速度呢?RS-232通訊格式有哪幾種?
2021-10-11 07:55:40
拓達(dá)伺服步進(jìn)電機(jī)是步進(jìn)電機(jī)的位置閉環(huán)控制,那不用說了一定是位置環(huán),控制量是長度(位移)。這是因為位置控制的閉環(huán)控制策略可以大致根據(jù)控制量分三種:1.位置環(huán),就是用位移量來做閉環(huán)控制。2.速度環(huán),就是
2018-08-25 10:05:53
控制器有比較好的閉環(huán)控制功能,用速度控制效果會好一點。如果本身要求不是很高,或者,基本沒有實時性的要求,用位置控制方式對上位控制器沒有很高的要求。 就伺服驅(qū)動器的響應(yīng)速度來看,轉(zhuǎn)矩模式運算量最小,驅(qū)動器
2018-10-26 10:57:29
希望有大神指點指點, 給點意見,有問題 QQ 328971422。 實現(xiàn)的功能有 查表法加減速控制, 可以運動過程中限制最大速度, 運功過程中重新設(shè)置目標(biāo)位置, 如果設(shè)置的目標(biāo)位置在另一方...
2021-06-27 06:21:08
周期同步位置模式(csp)周期同步位置模式下,上位控制器完成位置指令規(guī)劃,然后將規(guī)劃好的目標(biāo)位置 607Ah 上以周期性同步的方式發(fā)送給伺服驅(qū)動器,位置、速度、轉(zhuǎn)矩控制由伺服驅(qū)動器內(nèi)部完成周期同步速度
2021-09-15 06:51:43
伺服電機(jī)的主要應(yīng)用領(lǐng)域是什么?什么是伺服電機(jī)的速度控制模式?什么是伺服電機(jī)的位置控制模式?
2021-06-28 09:06:45
什么是運動控制? 運動控制就是通過機(jī)械傳動裝置對運動部件的位置、速度進(jìn)行實時的控制管理,使運動部件按照預(yù)期的軌跡和規(guī)定的運動參數(shù)(如速度、加速度參數(shù)等)完成相應(yīng)的動作。運動控制系統(tǒng)的典型構(gòu)成
2021-07-05 07:25:14
位置伺服系統(tǒng)中先由位置給定量與反饋量的差值經(jīng)過位置調(diào)節(jié)器的調(diào)節(jié)產(chǎn)生速度給定量,再由速度給定量與速度反饋量的差值經(jīng)過速度調(diào)節(jié)器的作用最終實現(xiàn)準(zhǔn)確的定位。由上述位
2009-07-02 08:53:37 19
19 伺服系統(tǒng)的扭矩控制(Toque Control)和速度控制(Velocity Control)?一般定位上的伺服系統(tǒng)之伺服馬達(dá)控制方式可分為扭矩控制(Toque Control)及速度控制(Velocity Control)兩類,這兩種控制方式都
2009-07-04 08:30:1253 介紹了基于Freescale HCS12系列單片機(jī)的智能巡線小車多模式速度控制系統(tǒng)的設(shè)計方案。該速度控制系統(tǒng)主要由直流電機(jī)驅(qū)動電路、速度檢測模塊和無線通信模塊構(gòu)成,包含四種速度
2009-08-13 10:00:53107 一般定位上的伺服系統(tǒng)之伺服馬達(dá)控制方式可分為扭矩控制(Toque Control)及速度控制(Velocity Control)兩類,這兩種控制方式都需要控制器和驅(qū)動器一起配合才有辦法動作,扭矩控制定位時,
2010-07-08 12:10:1132 直流伺服電機(jī)速度控制原理
直流伺服電機(jī)結(jié)構(gòu)示意圖
2010-02-25 17:36:55 3756
3756 
無速度傳感器異步電機(jī)變頻調(diào)速與位置伺服控制技術(shù)研究
2016-04-26 11:02:0129 PMSM伺服系統(tǒng)速度環(huán)PI控制器參數(shù)自整定及優(yōu)化_肖啟明
2017-01-07 16:52:0616 采用速度控制模式的動量輪控制系統(tǒng)
2017-01-17 19:47:0491 智能巡線小車的多模式速度控制系統(tǒng)
2017-05-22 10:44:0211 伺服電機(jī)可使控制速度,位置精度非常準(zhǔn)確,可以將電壓信號轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動控制對象。伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速受輸入信號控制,并能快速反應(yīng),在自動控制系統(tǒng)中,用作執(zhí)行元件,且具有機(jī)電時間常數(shù)小、線性度高、始動電壓等特性,可把所收到的電信號轉(zhuǎn)換成電動機(jī)軸上的角位移或角速度輸出。
2017-06-09 15:38:245928 電子發(fā)燒友網(wǎng)站提供《AC伺服驅(qū)動器位置控制和內(nèi)部速度模式的連接與設(shè)定介紹.pdf》資料免費下載
2017-09-21 15:57:5717 本文介紹了傳感器的作用和意義,伺服控制系統(tǒng)中傳感器的性能指標(biāo)及速度傳感器和加速度傳感器等伺服控制系統(tǒng)中的傳感器解析。
2017-11-18 10:46:1620 如果上位控制器有比較好的閉環(huán)控制功能,用速度控制效果會好一點。如果本身要求不是很高,或者基本沒有實時性的要求,用位置控制方式對上位控制器沒有很高的要求。
2017-12-07 15:57:02114179 
一般伺服都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式 。
2018-07-05 09:30:002570 伺服控制器就是常用的閉環(huán)控制系統(tǒng),給伺服控制器發(fā)送不同的脈沖實現(xiàn)不同的速度位置控制即可。一般是脈沖和模擬量控制,有速度PID 轉(zhuǎn)矩PID,伺服還具有反饋,會對反饋信號和輸出信號進(jìn)行比較,很好的閉換控制,精度高。
2018-03-27 09:30:003312 
伺服電機(jī)最主要的應(yīng)用還是定位控制,位置控制有兩個物理量需要控制,那就是速度和位置,確切的說,就是控制伺服電機(jī)以多快的速度到達(dá)什么地方,并準(zhǔn)確的停下。
2018-07-23 14:55:001782 周期同步位置模式下,上位控制器完成位置指令規(guī)劃,然后將規(guī)劃好的目標(biāo)位置 607Ah 上以周期性同步的方式發(fā)送給伺服驅(qū)動器,位置、速度、轉(zhuǎn)矩控制由伺服驅(qū)動器內(nèi)部完成。
2018-09-24 16:36:0021401 V90伺服可實現(xiàn)內(nèi)部位置控制,但使用PLC的I/O口控制接線及應(yīng)用相對比較復(fù)雜,V90集成了Modbus和USS通信,可以利用通信控制伺服實現(xiàn)內(nèi)部位置控制和速度控制,只需要一根通信電纜即可實現(xiàn)控制大為的簡化了接線。
2018-12-17 10:11:3312008 
的。那怎么去選擇合適的控制方式呢,我們都有過糾結(jié),下面由深圳伺服電機(jī)華科星小編給你解答: 如果對日本進(jìn)口富士電機(jī)的速度、位置都沒有要求,只要輸出一個恒轉(zhuǎn)矩當(dāng)然是用轉(zhuǎn)矩模式。如果上位控制器有比較好的閉環(huán)控制功能用速度控制
2020-06-28 17:12:04654 的。那怎么去選擇合適的控制方式呢,我們都有過糾結(jié),下面給你解答: 如果對日本進(jìn)口富士電機(jī)的速度、位置都沒有要求,只要輸出一個恒轉(zhuǎn)矩當(dāng)然是用轉(zhuǎn)矩模式。如果上位控制器有比較好的閉環(huán)控制功能用速度控制效果會好一點。如果本身要
2020-06-12 15:05:13505 伺服馬達(dá)選型和使用一般伺服都有三種控制方式:速度控制方式,轉(zhuǎn)矩控制方式,位置控制方式。速度控制和轉(zhuǎn)矩控制都是用模擬量來控制的。位置控制是通過發(fā)脈沖來控制的。富士伺服馬達(dá)如果上位控制器有比較
2020-06-12 11:46:133508 伺服電機(jī)如何與plc連接?這個首先要看你使用伺服電機(jī)的哪種模式,有位置模式、速度模式以及轉(zhuǎn)矩模式,位置模式一般用于定位功能的,最常見最簡單的方式就是通過脈沖+方向的形式來驅(qū)動伺服驅(qū)動器,位置
2019-09-13 16:51:0037943 伺服電機(jī)的控制模式:1、位置模式,2、速度模式。
2019-10-07 16:48:0014851 如果對位置和速度有一定的精度要求,而對實時轉(zhuǎn)矩不是很關(guān)心,用速度或位置模式比較好。如果上位控制器有比較好的閉環(huán)控制功能,用速度控制效果會好一點。如果本身要求不是很高,或者基本沒有實時性的要求,用位置控制方式對上位控制器沒有很高的要求。
2019-10-31 08:56:2213041 位置控制模式一般是通過外部輸入的脈沖的頻率來確定轉(zhuǎn)動速度的大小,通過脈沖的個數(shù)來確定轉(zhuǎn)動的角度,也有些伺服可以通過通訊方式直接對速度和位移進(jìn)行賦值,由于位置模式可以對速度和位置都有很嚴(yán)格的控制,所以一般應(yīng)用于定位裝置。
2019-12-09 09:31:418722 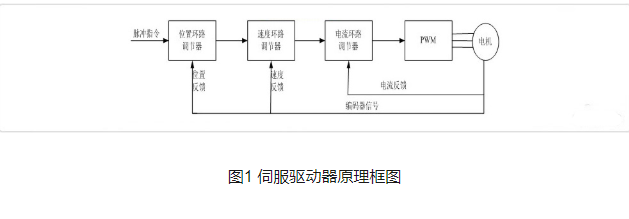
伺服電機(jī)作為一個高精度的控制電機(jī),已被廣泛的運用與各個行業(yè)。一般地,伺服電機(jī)在運用過程中,有三種控制場景模式。分別為位置模式、速度模式、轉(zhuǎn)矩模式。
2019-12-22 10:08:0110105 伺服電機(jī)是一個典型閉環(huán)反饋系統(tǒng),減速齒輪組由電機(jī)驅(qū)動,其終端(輸出端)帶動一個線性的比例電位器作位置檢測,該電位器把轉(zhuǎn)角坐標(biāo)轉(zhuǎn)換為一比例電壓反饋給控制線路板,控制線路板將其與輸入的控制脈沖信號比較
2020-07-29 10:52:497396 伺服系統(tǒng)是以位置和角度為控制量的控制系統(tǒng)的總稱,與位置和角度相關(guān)聯(lián)的速度、角速度、加速度、力等為控制量的系統(tǒng)也包含在伺服系統(tǒng)內(nèi)。
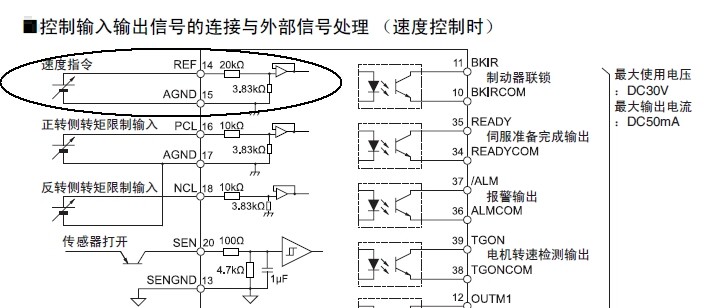
2020-09-27 15:05:052124 我們在平時控制伺服電機(jī)的時候,經(jīng)常用到的控制模式就是三種模式分別是速度控制模式、位置控制模式、轉(zhuǎn)矩控制模式。現(xiàn)以三菱的伺服驅(qū)動器為例,下面分別了解一下每個模式的控制接線及其注意事項。
2020-11-20 11:28:1918257 
、sv刪算法以及EDA設(shè)計方法學(xué)等,在速度伺服或位置伺服等高性能運動控制系統(tǒng)中有重要的應(yīng)用價值。所設(shè)計的控制器集成電路提供了標(biāo)準(zhǔn)的主機(jī)通信接口,可以對各種控制參數(shù)進(jìn)行在線調(diào)整,其電流環(huán)和速度環(huán)的采樣頻率均可以達(dá)到20kHz以上。
2021-03-30 09:32:439 隨著公司低壓直流伺服電機(jī)控制器的銷量增加,客戶反饋伺服控制器速度開環(huán)和速度閉環(huán)區(qū)別不是很明白,現(xiàn)對客戶反饋的速度閉環(huán)問題匯總整理及解決方案如下。
2021-09-08 09:16:552170 松下伺服有位置模式(脈沖控制),速度模式和轉(zhuǎn)矩模式(IO控制)三種。
2022-10-18 10:53:0025320 伺服系統(tǒng)是以位置和角度為控制量的控制系統(tǒng)的總稱,與位置和角度相關(guān)聯(lián)的速度、角速度、加速度、力等為控制量的系統(tǒng)也包含在伺服系統(tǒng)內(nèi)。
2022-11-04 15:00:25574 在這個 arduino 項目中,我們使用溫度傳感器 LM35 來控制伺服電機(jī)的速度。
2022-12-02 15:31:483 位置控制模式一般是通過外部輸入的脈沖的頻率來確定轉(zhuǎn)動速度的大小,通過脈沖的個數(shù)來確定轉(zhuǎn)動的角度,也有些伺服可以通過通訊方式直接對速度和位移進(jìn)行賦值。
2022-12-07 21:49:271413 伺服電機(jī)最主要的應(yīng)用還是定位控制,位置控制有兩個物理量需要控制,那就是速度和位置,確切的說,就是控制伺服電機(jī)以多快的速度到達(dá)什么地方,并準(zhǔn)確的停下。
2022-12-12 14:06:174697 伺服電機(jī)是一種可以通過控制器精確地控制位置、速度和加速度的電機(jī)。伺服電機(jī)通常由電機(jī)、編碼器、控制器等部分組成。控制器根據(jù)編碼器反饋的位置信息,調(diào)節(jié)電機(jī)的驅(qū)動電流,從而控制電機(jī)的位置和運動。因此在很多需要高精度運動控制的領(lǐng)域得到了廣泛應(yīng)用。
2023-03-03 11:17:278928 伺服控制器是一種用于控制電機(jī)運動的高精度電子設(shè)備,主要作用是精確控制電機(jī)的位置、速度和加速度等運動參數(shù),從而實現(xiàn)各種運動控制任務(wù)。伺服控制器通常使用閉環(huán)控制方式,即通過電機(jī)編碼器或位置傳感器的反饋信號與期望的控制信號進(jìn)行比較,從而調(diào)整輸出信號以控制電機(jī)。
2023-03-09 09:52:061953 伺服電機(jī)非常準(zhǔn)確地控制速度和位置,可以將電壓信號轉(zhuǎn)化為轉(zhuǎn)矩和轉(zhuǎn)速以驅(qū)動控制對象。伺服電機(jī)轉(zhuǎn)子轉(zhuǎn)速受輸入信號控制,并能快速反應(yīng),在自動控制系統(tǒng)中,用作執(zhí)行元件,且具有機(jī)電時間常數(shù)小、線性度高、始動電壓等特性,可把所收到的電信號轉(zhuǎn)換成電動機(jī)軸上的角位移或角速度輸出。
2023-03-22 11:39:401298 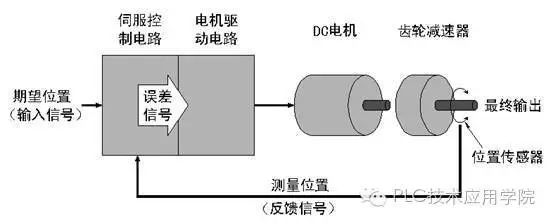
在回答這個問題之前,首先要清楚伺服電機(jī)的用途,相對于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的伺服控制,其實就是對伺服電機(jī)的位置控制。 其實,伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-04-27 17:34:351115 
(Homing Mode) :顧名思義,用于尋零 輪廓位置模式(Profile Position Mode) :上位機(jī)給定目標(biāo)絕對/相對位置、速度、加減速參數(shù),伺服內(nèi)部的軌跡發(fā)生器根據(jù)以上參數(shù)生成目標(biāo)位置曲線指令
2023-05-16 15:53:540 伺服電機(jī)速度控制和轉(zhuǎn)矩控制都是用模擬量來控制,位置控制是通過發(fā)脈沖來控制。
2023-05-24 09:44:00636 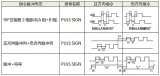
。如果對位置和速度有一定的精度要求,而對實時轉(zhuǎn)矩不是很關(guān)心,用速度或位置模式比較好。如果上位控制器有比較好的閉環(huán)控制功能,用速度控制效果會好一點。如果本身要求不是很
2023-04-07 10:42:03728 
(1)位置控制:在位置控制模式下,控制系統(tǒng)通過控制伺服電機(jī)的位置來實現(xiàn)精確的定位。通常使用編碼器或其他位置傳感器來反饋電機(jī)的實際位置,并與目標(biāo)位置進(jìn)行比較,然后調(diào)整電機(jī)的輸出以使其達(dá)到目標(biāo)位置
2023-07-27 08:35:02802 在回答這個問題之前,首先要清楚伺服電機(jī)的用途,相對于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機(jī)的位置控制。其實,伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-08-09 09:25:28602 臂或其他執(zhí)行器。通過位置模式,可以實現(xiàn)準(zhǔn)確的物料定位和裝配操作。 (3)在包裝和印刷行業(yè)中,伺服電機(jī)位置模式被廣泛應(yīng)用于驅(qū)動送料系統(tǒng)、定位裝置和印刷頭等設(shè)備。通過位置模式,可以實現(xiàn)精確的紙張或包裝材料的定位和運動控制
2023-08-15 08:25:01484 膨脹閥工作時,可以應(yīng)用伺服電機(jī)的以下幾種運動模式: (1)位置控制:通過伺服電機(jī)的位置控制功能,可以精確地控制膨脹閥的開度。根據(jù)系統(tǒng)需求,可以設(shè)定目標(biāo)位置,并使用閉環(huán)反饋控制來實現(xiàn)準(zhǔn)確的位置控制
2023-08-25 08:35:01218 
在位置模式控制中,伺服電機(jī)通過傳感器獲取自身位置信息和目標(biāo)位置信息,然后計算出兩者之間的差值,進(jìn)而控制電機(jī)輸出的電流、電壓、轉(zhuǎn)矩或速度,實現(xiàn)電機(jī)的精準(zhǔn)旋轉(zhuǎn)。在該模式下,伺服電機(jī)的準(zhǔn)確度非常高,可以在微小的角度范圍內(nèi)進(jìn)行控制。
2023-08-26 11:07:134544 在回答這個問題之前,首先要清楚伺服電機(jī)的用途,相對于普通的電機(jī)來說,伺服電機(jī)主要用于精確定位,因此大家通常所說的控制伺服,其實就是對伺服電機(jī)的位置控制。其實,伺服電機(jī)還用另外兩種工作模式,那就是速度控制和轉(zhuǎn)矩控制,不過應(yīng)用比較少而已。
2023-09-08 11:22:48736 伺服系統(tǒng)是以位置和角度為控制量的控制系統(tǒng)的總稱,與位置和角度相關(guān)聯(lián)的速度、角速度、加速度、力等為控制量的系統(tǒng)也包含在伺服系統(tǒng)內(nèi)。
2023-09-29 10:54:00198 
通常情況下,伺服系統(tǒng)由電流環(huán)、速度環(huán)以及位置環(huán)組成,3個閉環(huán)是由內(nèi)到外互相包容的。也是就說,速度環(huán)包含電流環(huán),而位置環(huán)又包含速度環(huán)。在極少數(shù)場合中,還會遇到只有位置環(huán)與電流環(huán)的情況,不過只是在特殊應(yīng)用中。典型的三環(huán)控制回路如下圖所示。
2023-10-08 11:13:11824 
伺服電機(jī)重要的應(yīng)用是定位控制。位置控制有兩個需要控制的物理量,即速度和位置。準(zhǔn)確地說,是控制伺服電機(jī)到達(dá)位置的速度和停止的速度。
2023-11-06 10:29:18332 在機(jī)器人速度模式下的外環(huán)力矩控制中,通常使用速度環(huán)和力矩環(huán)兩個控制環(huán)路來實現(xiàn)。速度環(huán)控制機(jī)器人的關(guān)節(jié)速度,而力矩環(huán)控制機(jī)器人輸出的力矩。 以下是實現(xiàn)速度模式下的外環(huán)力矩控制的一般步驟: 設(shè)定期望速度
2023-11-09 17:22:27199 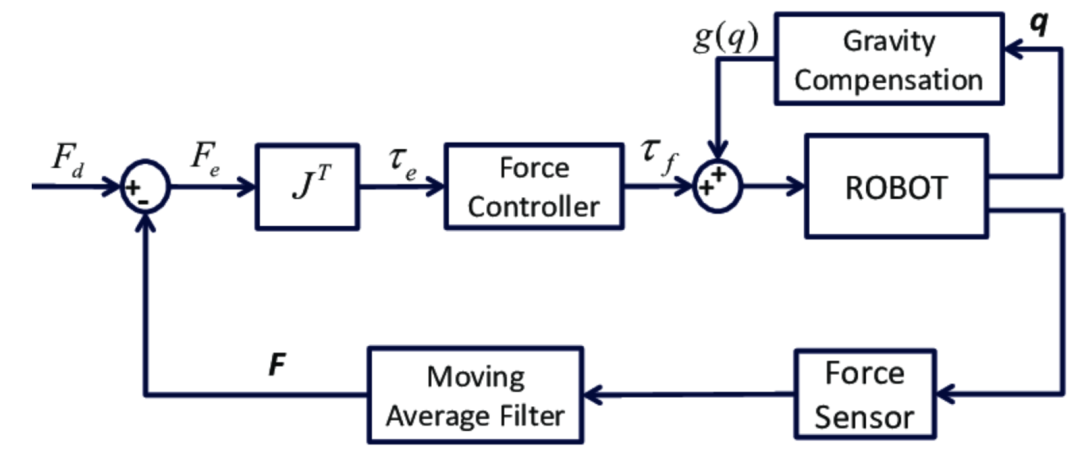
伺服電機(jī)速度增益的作用? 伺服電機(jī)速度增益是伺服控制系統(tǒng)中的一個重要參數(shù),它對于電機(jī)的運行速度和穩(wěn)定性起著關(guān)鍵作用。本文將詳盡、詳實、細(xì)致地介紹伺服電機(jī)速度增益的作用。 一、伺服電機(jī)的基本原理 伺服
2023-12-25 13:57:55560 伺服電機(jī)速度增益過大會導(dǎo)致控制系統(tǒng)不穩(wěn)定,出現(xiàn)過沖或者振蕩現(xiàn)象;伺服電機(jī)速度增益過小會導(dǎo)致控制系統(tǒng)響應(yīng)遲鈍,無法快速調(diào)整速度。因此,需要通過試驗和調(diào)整來確定合適的速度增益,以保證控制系統(tǒng)的穩(wěn)定性。
2024-01-03 09:20:15193 轉(zhuǎn)矩模式下如何控制電機(jī)速度 在轉(zhuǎn)矩模式下,控制電機(jī)速度的基本原理是將轉(zhuǎn)矩需求轉(zhuǎn)換為相應(yīng)的電流輸出,通過控制電機(jī)的電流來實現(xiàn)轉(zhuǎn)速控制。以下是一般的步驟和方法: 1. 設(shè)定轉(zhuǎn)矩需求:根據(jù)應(yīng)用需求,設(shè)定
2024-02-21 17:53:35453
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論