 【技術分享】EtherCAT 分布式時鐘簡介
【技術分享】EtherCAT 分布式時鐘簡介
分布式時鐘是EtherCAT技術亮點之一,其精準同步使得整個系統都運行在統一的時鐘下,每個EtherCAT從站的同步性遠小于1 us。本文將介紹引入分布式時鐘同步的原因并闡述三種同步模式。
由于EtherCAT系統中可能存在各從站時鐘計數不一致的現象,為了精確地控制從站設備何時接收輸出數據和何時提供輸入信息,確保數據傳輸的準確性和實時性,EtherCAT設備系統需要實現時間同步,而引入分布式時鐘可以有效解決EtherCAT系統時鐘同步問題。
 ?EtherCAT網絡中各個從站之間時鐘計數不一致的原因
?EtherCAT網絡中各個從站之間時鐘計數不一致的原因
- 時鐘偏移:由于各個站點啟動順序不同,初始化流程不同,導致各個從站本地時鐘開始計數的時間不一致。
時鐘漂移:受溫度,物理特性等因素影響,各個時鐘的晶振頻率并不完全一致,因此隨著運行時間的增加,原來一致的時鐘也會逐漸產生偏差。
 ?時鐘偏移和時鐘漂移的解決思路1. 針對時鐘偏移采取偏移補償法
?時鐘偏移和時鐘漂移的解決思路1. 針對時鐘偏移采取偏移補償法
- 記錄主站時間并廣播一個鎖存各從站時鐘的報文;
- 依次讀取各從站被鎖存的時間,計算其他從站與第一個從站的時間差;
- 將各個從站的時鐘差值附加到從站的本地時鐘上。
2. 針對時鐘漂移采取漂移補償法
- 在從站中選擇第一個支持分布式時鐘功能的從站時鐘作為參考時鐘;
- 在位移補償之后,主站在每個周期中對參考時鐘的時鐘計數執行單讀單寫(RMW)的指令,讀取其時間并廣播到其他從站中;
- 其他從站將自身的時間與接收到的參考時間進行對比,動態調整計數器的加值。
?分布式時鐘的三種同步模式1. FreeRun模式
每個從站的定時周期都不一樣,在每個定時周期來到的時候,每個從站將執行自己的程序,檢查通道上有沒合適的輸入數據,如果有合適的數據就令其有效,并放到對應的同步管理器通道上等待主站取走。如圖1所示,其中T1為本地微處理器從ESC復制數據并計算輸出數據的時間,T2為輸出硬件延時,T3為輸入鎖存偏移時間。
缺點:Free Run模式下,由于每個從站的時鐘快慢不一致,所以沒有任何同步性可言。
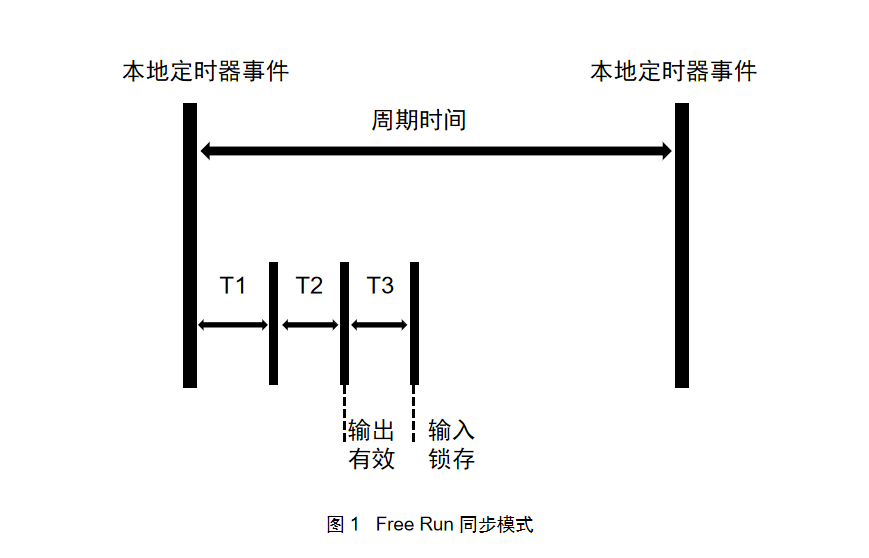
圖1FreeRun同步模式
2. SM同步機制(SyncManager同步管理器)
SM指的是同步管理器同步,當數據幀在到達對應的從站的時候,會觸發一個叫同步管理器事件的信號,當從站接收到這個信號的時候,會進行中斷服務例程(即中斷保存當期任務,去執行插入的中斷例程)。換言之,SM同步模式是根據數據幀到達特定從站的時候觸發的SM事件信號來進行同步。
缺點:對于特定的幀來說,它到達每一個從站的時間必然不同,當系統很龐大的時候,每個從站接收到數據幀的時間會相差很大,越在后邊的從站接收到數據幀的時間越晚,同步性效果越差。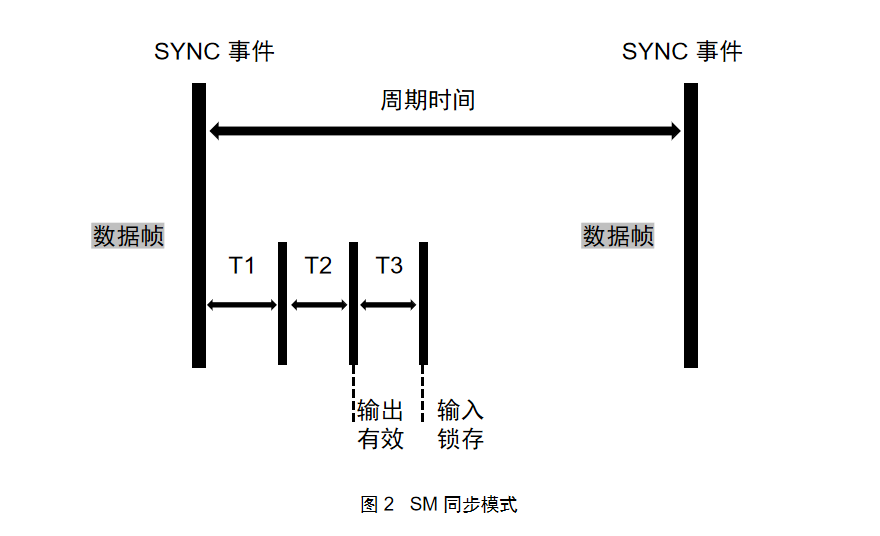
圖2 SM同步模式
3. DC同步機制
這種模式就是高精度的時間同步模式。如圖3所示,數據幀在SYNC信號提前T1時間到達,從站在SYNC事件之前已經完成數據交換和控制計算,當接收SYNC信號后立即執行輸出操作,從而提高了同步性能。可以理解為某個從站數據幀到達后不立即處理,因為有些從站還沒接收到數據,等待一個指定的時間,和其他從站一起處理數據,這時候能夠達到較好的同步效果。
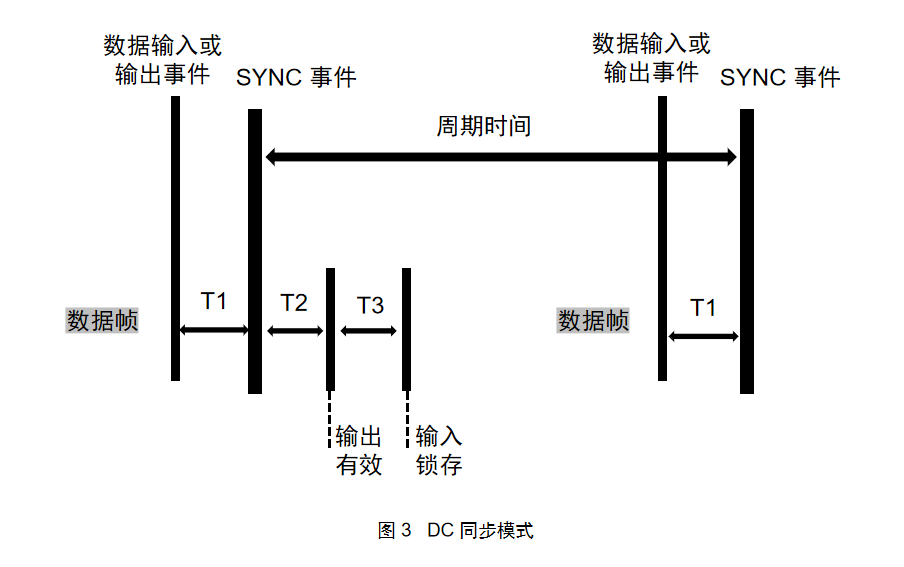
圖3 DC同步模式
?快速配置分布式時鐘ZLG致遠電子推出了一系列高性能EtherCAT主站控制器和PCIe EtherCAT通訊卡,為了方便用戶的使用,這些EtherCAT主站控制器和通訊卡均提供全面的上位機配置軟件AWStudio。用戶可以通過AWStudio快速掃描從站設備,并可靈活配置分布式時鐘。
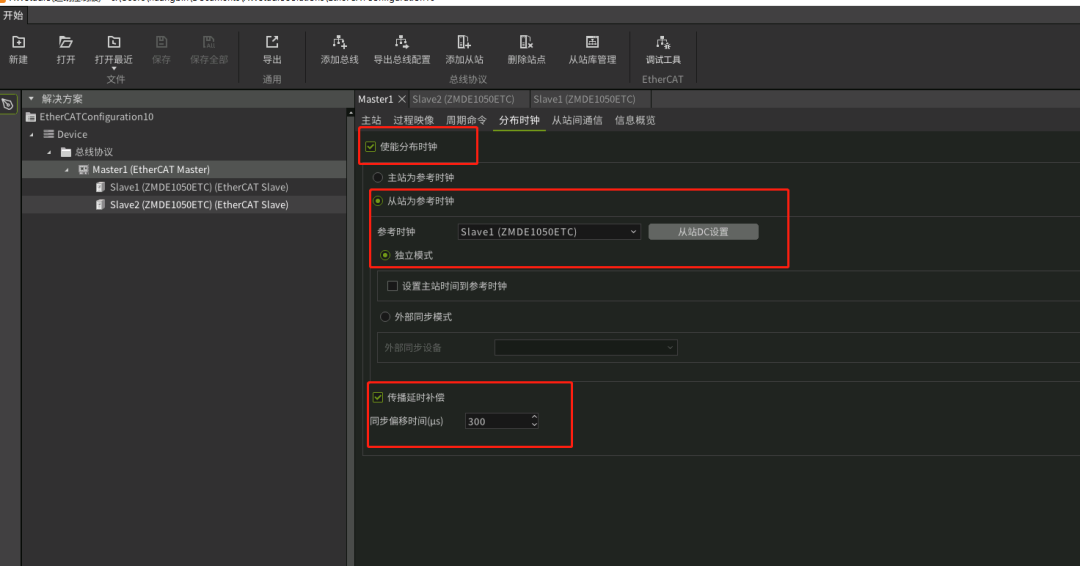
圖4AWStudio分布式時鐘配置界面AWStudio分布式時鐘配置步驟:
首先打開分布式時鐘使能;
然后選擇參考時鐘,可以選擇主站或者某一個從站作為參考時鐘,通常以第一個從站作為參考時鐘;
最后設置同步偏移時間,同步偏移時間(Toffset)根據以下公式計算:

其中,T2(n)為由主站發送時鐘報文到達第n個從站的時間,T1為第一個從站作為參考時鐘的時間,Tdelay(n)為參考時鐘到各從站的傳輸延時。
廣州致遠電子以EtherCAT工業以太網協議為向導,開發了一系列EtherCAT主站控制器和通訊卡。這些EtherCAT主站控制器和PCIe EtherCAT通訊卡可以快速、有效、便捷地構建數控智能化設備。通過支持固件更新、配置文件下載、數據記錄與監控、遠程控制與診斷、分布式文件系統等功能,更能夠適應工廠智能化、信息化產業的需求。
表1 EtherCAT主站控制器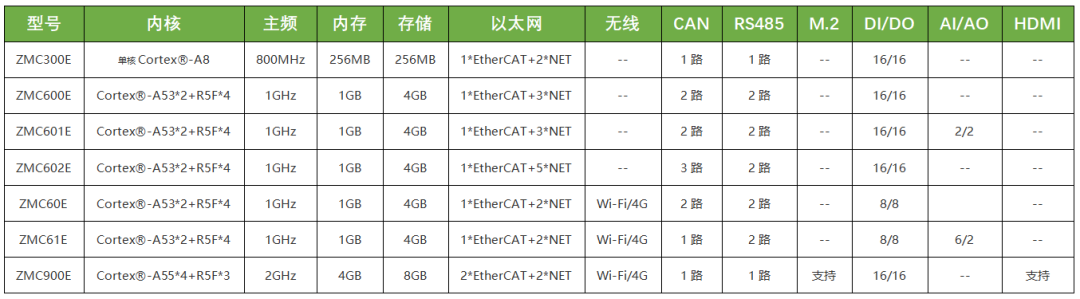
 圖5 EtherCAT主站控制器系統框圖表2PCIeEtherCAT主站通訊卡
圖5 EtherCAT主站控制器系統框圖表2PCIeEtherCAT主站通訊卡

-
數據傳輸
+關注
關注
9文章
1950瀏覽量
64762 -
網絡
+關注
關注
14文章
7594瀏覽量
89087 -
ethercat
+關注
關注
18文章
728瀏覽量
38792
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論