") 怎么去處理視覺SLAM長期定位中的外觀變化和軌跡漂移呢?
怎么去處理視覺SLAM長期定位中的外觀變化和軌跡漂移呢?
1. 這篇文章希望解決什么問題?
服務機器人、巡檢機器人、自動駕駛車輛等SLAM應用,需要進行長時間的定位和導航,但是可能會遇到很多光照變化(甚至天氣季節(jié)變化)、不同視角提取的不同特征、原先場景的目標已經(jīng)移除等等很多的環(huán)境變化問題,如果處理不好的話很容易引發(fā)軌跡漂移甚至跟蹤丟失。
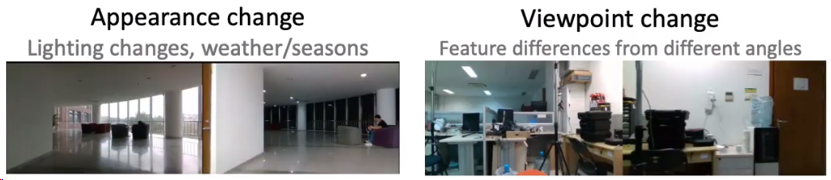
作者認為,產(chǎn)生這種問題的關鍵在于,現(xiàn)有的視覺SLAM方法依賴于低級的特征描述子。這些特征描述子對環(huán)境變化不魯棒,并導致地圖尺寸過大,不利于機器人的長期部署。也有一些SLAM方案使用語義信息來輔助定位,但主要面向短期定位導航過程。
2. 具體原理是什么?
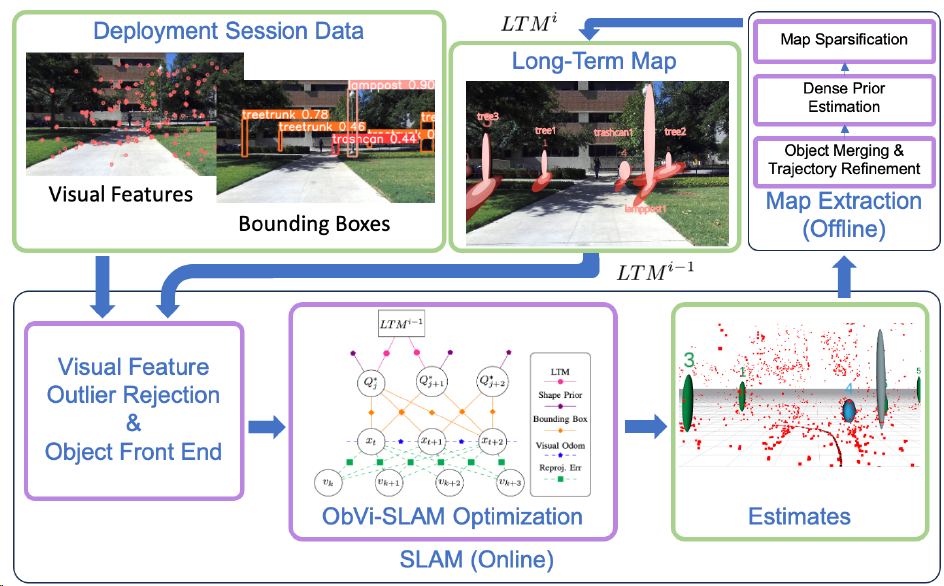
ObVi-SLAM希望同時利用上述兩種方法的優(yōu)點,首先利用低級視覺特征來做高質(zhì)量的短時VO。然后為了保證全局的長期一致性,構建一個不確定感知的持久目標的長期地圖,并在每次部署后進行更新。
具體來說,ObVi-SLAM實際是利用環(huán)境中靜態(tài)物體的長期地圖來做輔助定位,因為目標檢測是對外觀不敏感的,所以ObVi-SLAM也就可以對環(huán)境變化有魯棒性。同時每個語義目標都會計算不確定性,隨時間推移進行更新。
3. 和其他SOTA方法對比如何?
ObVi-SLAM在兩個月內(nèi)收集室外不同時間的16組數(shù)據(jù),估計Lifelong軌跡的穩(wěn)定性,可以發(fā)現(xiàn)其他方案都不同程度的出現(xiàn)了很大的軌跡漂移。
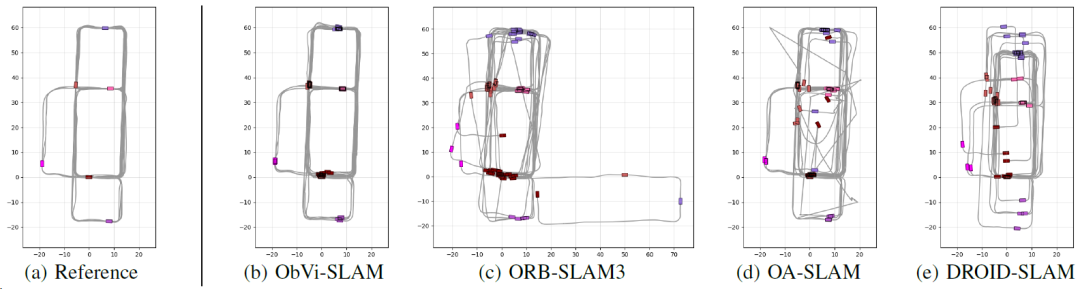
OA-SLAM也是一種物體級SLAM,剛開始性能也很好,但是隨著時間增加,定位精度明顯降低。

地圖文件的大小對比,可以發(fā)現(xiàn)ObVi-SLAM比ORB3的地圖小很多,有利于機器人的實際落地。

審核編輯:劉清
-
機器人
+關注
關注
211文章
28632瀏覽量
208000 -
SLAM
+關注
關注
23文章
426瀏覽量
31895 -
自動駕駛
+關注
關注
784文章
13923瀏覽量
166831
原文標題:如何處理視覺SLAM長期定位中的外觀變化和軌跡漂移?
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關推薦
機器視覺系統(tǒng)應用于標簽外觀視覺檢查!
基于視覺的slam自動駕駛
單目視覺SLAM仿真系統(tǒng)的設計與實現(xiàn)
視覺SLAM技術淺談
視覺SLAM深度解讀
科普|視覺SLAM是什么——三種視覺SLAM方案
機器人主流定位技術:激光SLAM與視覺SLAM誰更勝一籌
教你們視覺SLAM如何去提高定位精度
使用OptiTrack光學跟蹤系統(tǒng)和Turtlebot機器人進行視覺SLAM定位實驗

視覺SLAM開源方案匯總 視覺SLAM設備選型

視覺SLAM是什么?視覺SLAM的工作原理 視覺SLAM框架解讀






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論