") myCobot 320 APP 控制技術(shù)案例
myCobot 320 APP 控制技術(shù)案例
引言
機(jī)械臂是現(xiàn)代工業(yè)和科研領(lǐng)域中的重要工具,它們在制造業(yè)、醫(yī)療、農(nóng)業(yè)、教育等多個領(lǐng)域都有廣泛的應(yīng)用。這些機(jī)器臂不僅可以進(jìn)行精密操作,而且能夠在人類無法進(jìn)入的危險環(huán)境中工作,大大提高了工作效率和安全性。然而,傳統(tǒng)的機(jī)械臂控制方式往往需要專業(yè)知識和復(fù)雜的編程,這在某種程度上限制了其普及和應(yīng)用。因此,手機(jī)APP控制機(jī)械臂的方法應(yīng)運(yùn)而生。手機(jī)APP控制的優(yōu)點(diǎn)在于,它可以使非專業(yè)人士也能方便地操控機(jī)械臂,同時,通過手機(jī)APP,用戶可以遠(yuǎn)程控制機(jī)械臂,極大地提高了操作的便利性和靈活性。本文的目的是深入探討這這個主題,今天我將用MyCobot Controlller APP 使用手機(jī)來控制myCobot 320 M5Stack。
介紹
myCobot 320
myCobot 320是一款面向用戶自主編程開發(fā)的六軸協(xié)作機(jī)械臂,內(nèi)置運(yùn)動學(xué)正逆解算法,開放ROS仿真開發(fā)環(huán)境,配備12個標(biāo)準(zhǔn)的24V工業(yè)IO接口,可擴(kuò)展開發(fā)PLC控制編程。myCobot 320的工作半徑可達(dá)到350mm,末端能夠承受最大負(fù)載1kg,能夠控制重復(fù)定位精度在0.5mm的范圍內(nèi)。
myCobot Controller
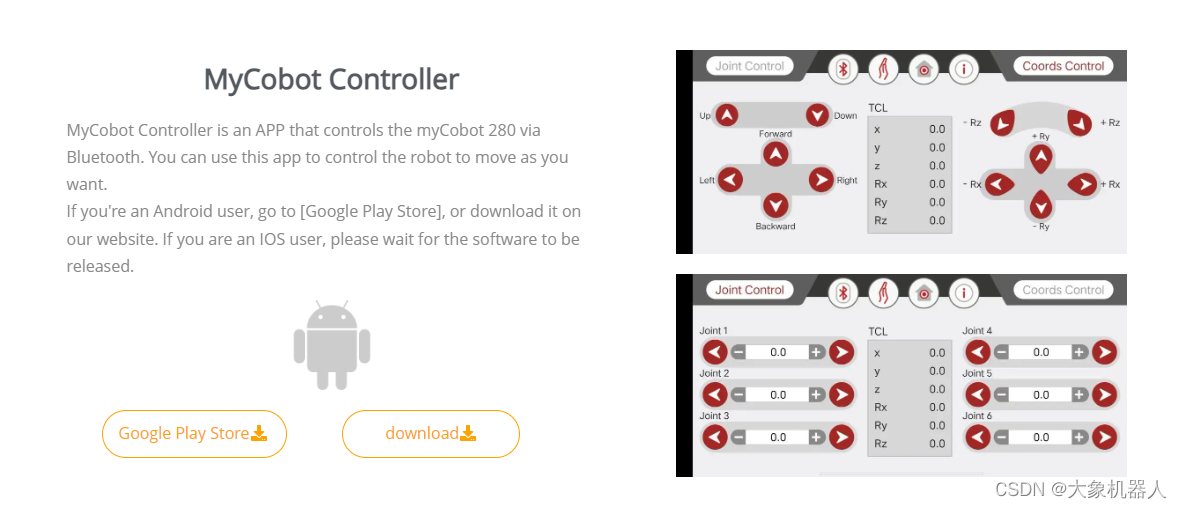
“myCobot Controller ”是由大象機(jī)器人公司推出的一款專門用于控制myCobot系列機(jī)械臂的應(yīng)用程序。這款A(yù)PP采用了藍(lán)牙技術(shù),能夠通過用戶的手機(jī)或平板電腦與myCobot機(jī)械臂進(jìn)行無線連接。

myCobot Controller APP的工作原理主要基于藍(lán)牙通信技術(shù)。通過跟myCobot機(jī)械臂進(jìn)行藍(lán)牙匹配,成功后就可以通過APP來控制機(jī)械臂的各項(xiàng)功能,這種方式不僅操作簡便,而且能夠?qū)崿F(xiàn)實(shí)時的,無線控制,大大提高了操作的靈活性和便捷。
APP控制機(jī)械臂的步驟
接下來我們會一邊操作,一邊介紹這個功能如何該使用。
安裝APP
目前myCobot Controller目前只支持安卓系統(tǒng)的手機(jī)使用,IOS系統(tǒng)用戶需要暫時等待一段時間。點(diǎn)擊連接可以直接跳轉(zhuǎn)至下載地方,目前有兩種方式可以安裝app,第一種可以直接在Google play store上搜索mycobot controller下載,第二種是可以在官網(wǎng)下載apk到手機(jī)上直接安裝。(正常下載之后安裝即可)Google Play下載連接:https://play.google.com/store/apps/details?id=com.elephantrobotics.mycobot_controller
Downloads - Elephant Robotics
連接機(jī)械臂
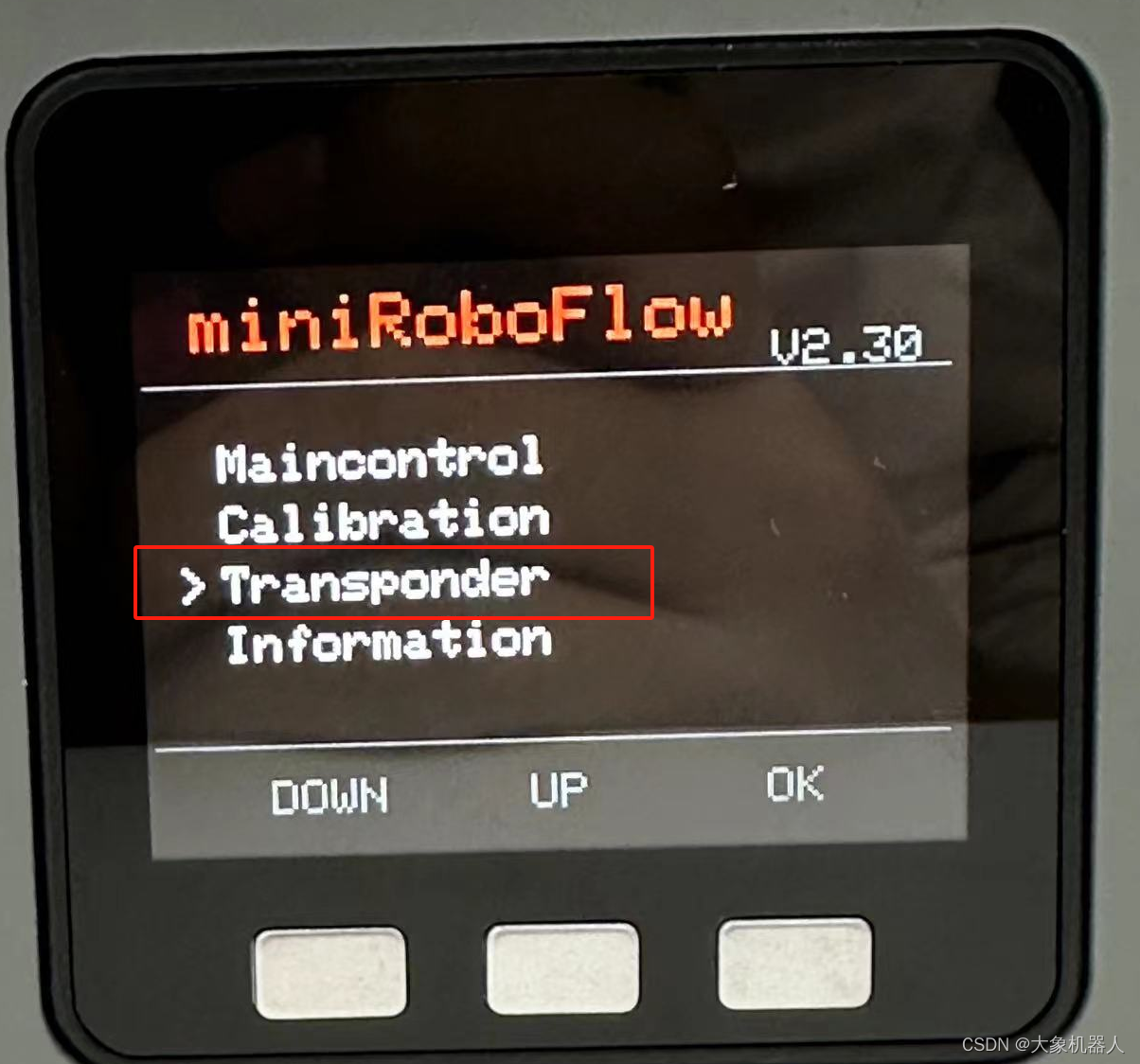
首先我們給myCobot 接上電源開機(jī) ,選擇“Transponder”。
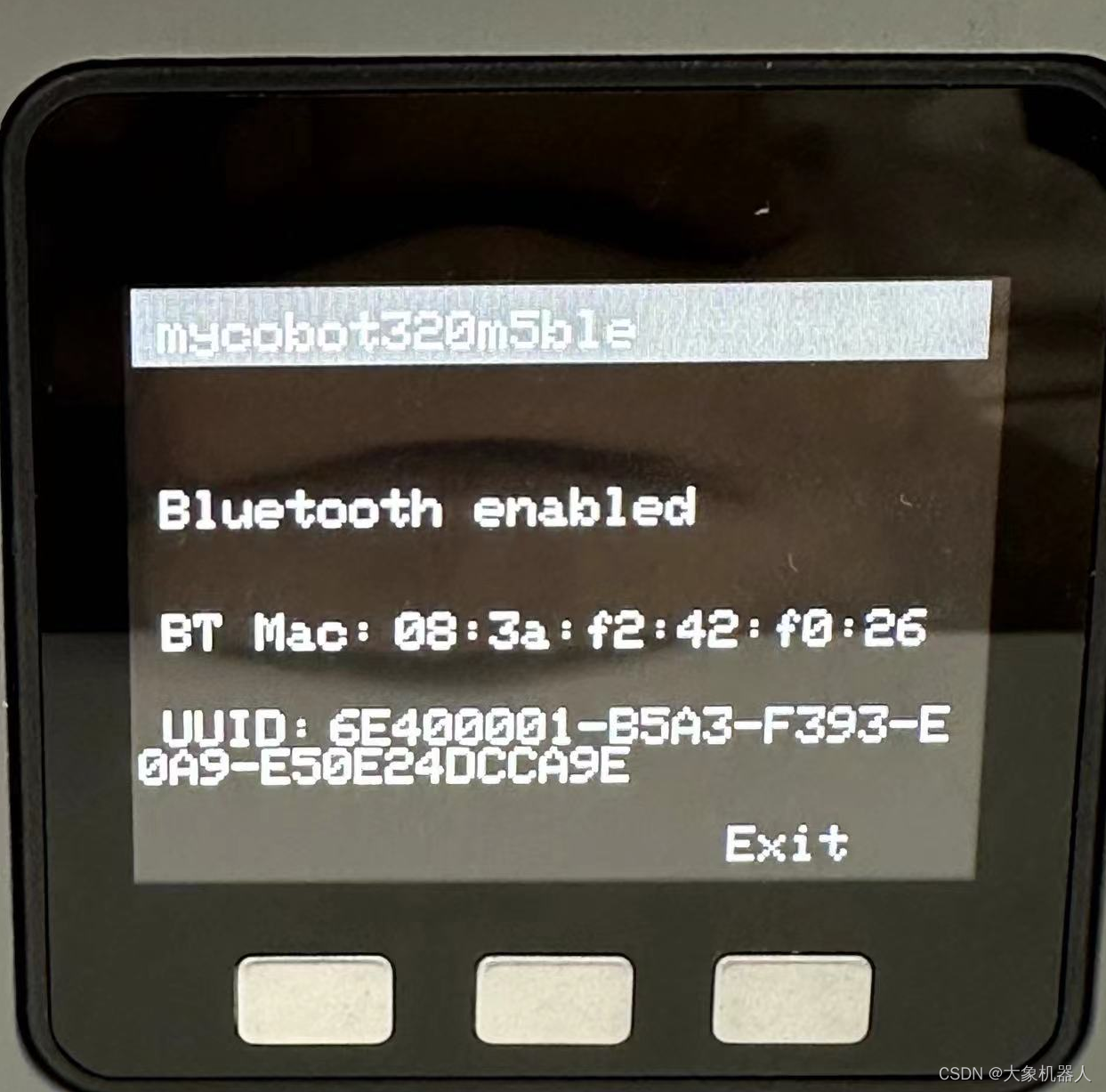
進(jìn)入之后,我們選擇藍(lán)牙模式,”Bluetooth“

成功之后的界面是會出現(xiàn)下圖的情況。藍(lán)牙的名稱是:mycobot320m5ble,它的mac地址是:08:3a:f2:42:f0:26(每臺機(jī)器是不一樣的,方便區(qū)分同時有兩臺機(jī)器開著在那)進(jìn)入這個頁面我們等待就好了,接下來是手機(jī)上的操作。
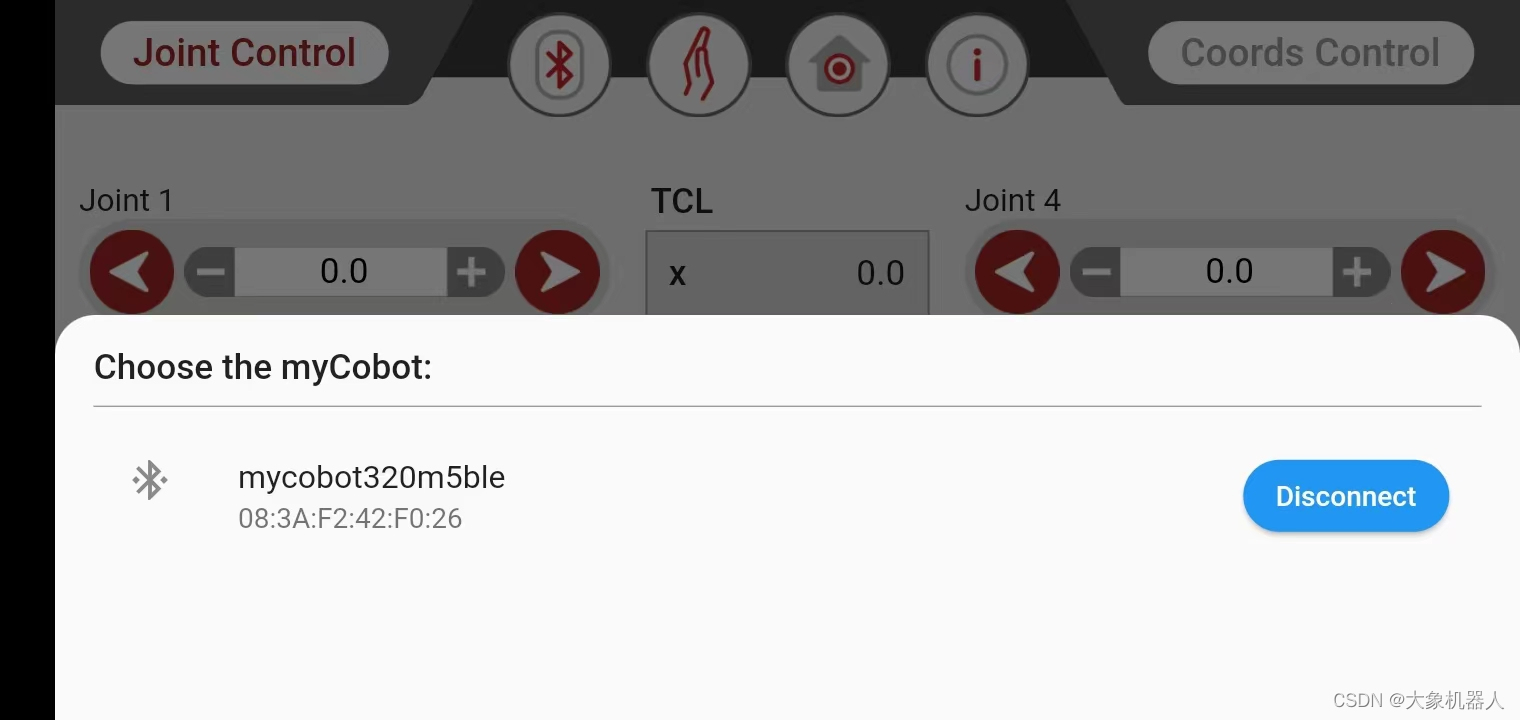
打開下載好的APP,點(diǎn)擊藍(lán)牙的圖標(biāo)連接mycobot。
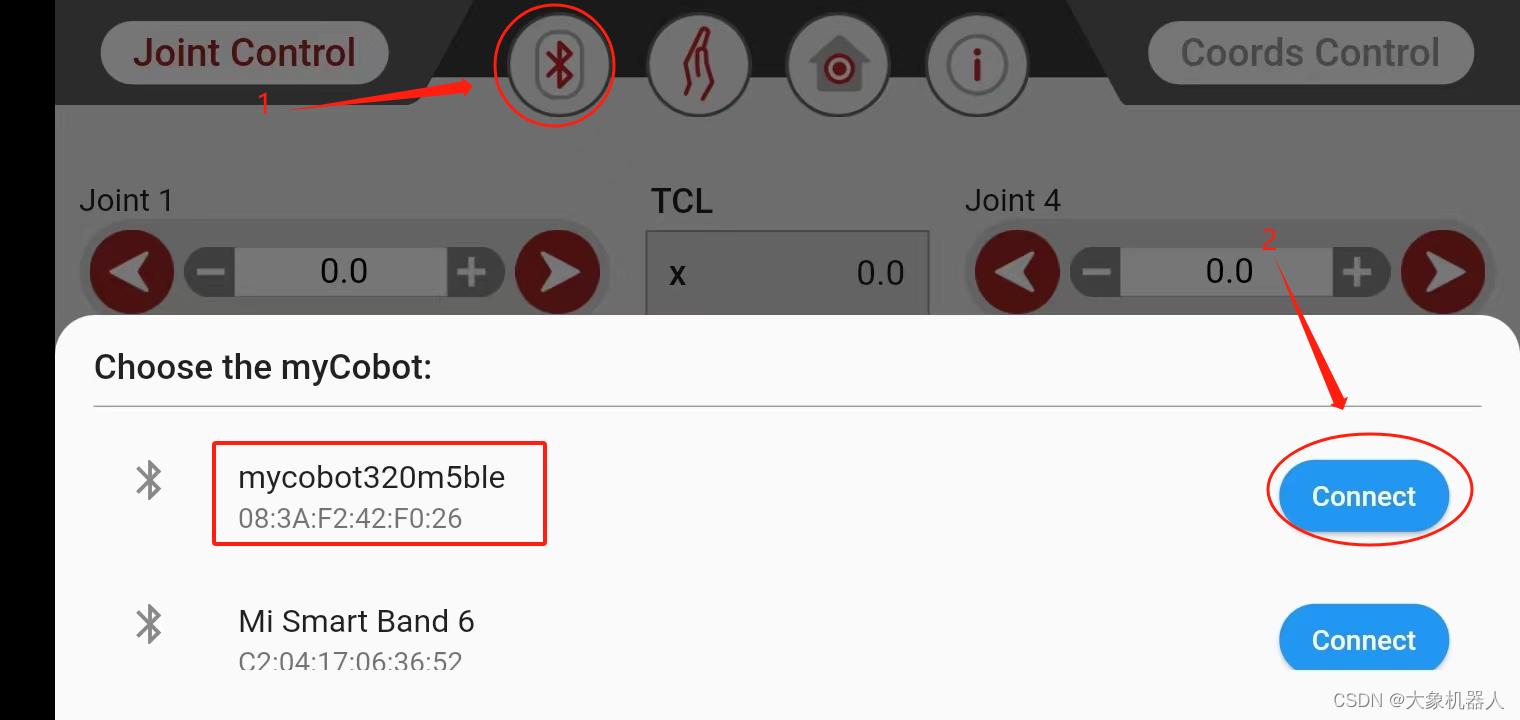
看準(zhǔn)確藍(lán)牙的名稱對應(yīng)機(jī)械臂的名稱,“mycobot320m5ble”,不確定的話看mac地址,mac地址是唯一的。顯示下圖的情況就連接成功了。
機(jī)械臂運(yùn)動控制
APP是用機(jī)械臂的正逆運(yùn)動學(xué)來控制的主要分為兩種,一種是機(jī)械臂角度的控制,另一種是機(jī)械臂坐標(biāo)的控制。
Joint Control
角度控制是正運(yùn)動學(xué)算法的一種控制方式。正運(yùn)動學(xué)是指已知機(jī)器人各個關(guān)節(jié)的參數(shù)(角度)的情況下,計算機(jī)器人末端執(zhí)行器的位置和姿態(tài)的過程。換句話來說就是,通過旋轉(zhuǎn)角度就能計算出機(jī)械臂末端的在空間中的坐標(biāo)位置。

左右兩邊的Joint N(1-6),是可以增加大小來控制對應(yīng)mycobot關(guān)節(jié)的角度。中間的TCL部分的六個參數(shù)代表的是此時機(jī)械臂末端的笛卡爾坐標(biāo)值。
Coords Control
坐標(biāo)控制是逆運(yùn)動學(xué)算法的一種控制方式。逆運(yùn)動學(xué)是指已知機(jī)器人末端執(zhí)行器的坐標(biāo)位置,計算出該狀態(tài)下機(jī)器人各個關(guān)節(jié)的參數(shù)(角度)。就可以通過調(diào)整機(jī)器人末端坐標(biāo)來移動機(jī)器人,從而計算出當(dāng)前狀態(tài)下機(jī)器人關(guān)節(jié)角度的參數(shù)。
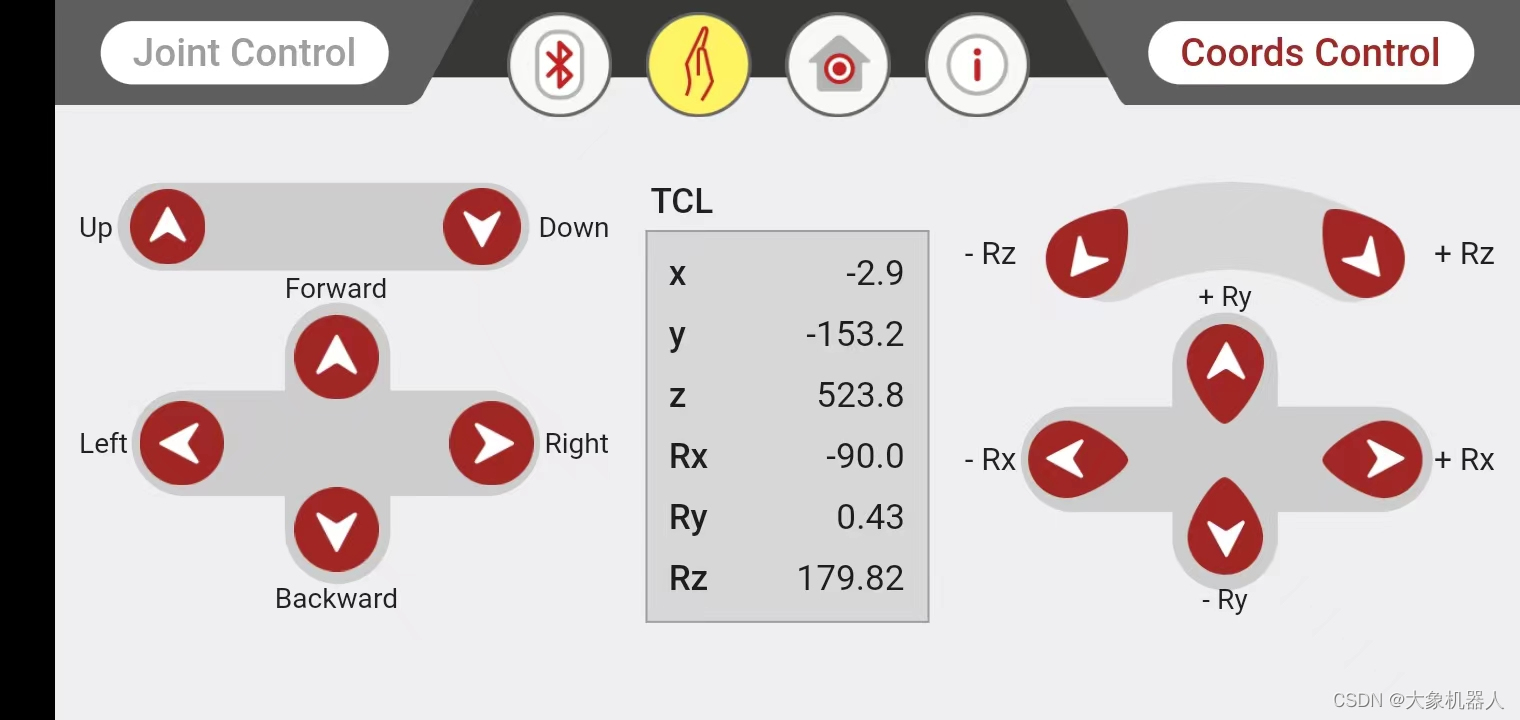
左邊的按鈕很好理解,對應(yīng)著機(jī)械臂的末端在空間的位置,上下左右走直線運(yùn)動。換句話話說就是機(jī)械臂的末端在空間中進(jìn)行,向前,向后,向左,向右,向上,向下運(yùn)動,主要是走直線運(yùn)動。在笛卡爾坐標(biāo)當(dāng)中,‘Rz,Ry,Rx'通常用來表示圍繞z軸,y軸,x軸的旋轉(zhuǎn),這些旋轉(zhuǎn)通常遵循右手規(guī)則,即如果你的右手的四指按照旋轉(zhuǎn)方向卷曲,那么你的大拇指指向的方向就是旋轉(zhuǎn)軸的方向。
通常來說:
"rz":圍繞z軸旋轉(zhuǎn)。這會導(dǎo)致機(jī)械臂末端在x-y平面內(nèi)旋轉(zhuǎn),也就是說,它會改變末端執(zhí)行器的偏航角(yaw angle)。
"ry":圍繞y軸旋轉(zhuǎn)。這會導(dǎo)致機(jī)械臂末端在z-x平面內(nèi)旋轉(zhuǎn),也就是說,它會改變末端執(zhí)行器的俯仰角(pitch angle)。
"rx":圍繞x軸旋轉(zhuǎn)。這會導(dǎo)致機(jī)械臂末端在y-z平面內(nèi)旋轉(zhuǎn),也就是說,它會改變末端執(zhí)行器的滾轉(zhuǎn)角(roll angle)。
簡單點(diǎn)說,就是機(jī)械臂圍繞x,y,z軸做旋轉(zhuǎn)。
操作視頻
接下來我們來看一下如何操作的。
總結(jié)
總的來說手機(jī)APP控制提供了一種更直觀、更易于理解的操作方式,使得非專業(yè)人士也能夠快速上手,其次我們還能夠通過遠(yuǎn)程操控機(jī)械臂,這使得在一些復(fù)雜或者危險環(huán)境中也能夠操控機(jī)械臂,能夠擴(kuò)增機(jī)械臂的適用場景。
目前來說APP的功能還能夠進(jìn)行增加,你覺得有什么需要的功能增加在APP上呢?歡迎在下方留言,我們一起探討APP的功能優(yōu)化!如果你喜歡這篇文章,點(diǎn)贊和留言是對我們最大的支持!
審核編輯 黃宇
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28632瀏覽量
208061 -
無線
+關(guān)注
關(guān)注
31文章
5470瀏覽量
173711
發(fā)布評論請先 登錄
相關(guān)推薦
如何使用PLC控制myCobot 320機(jī)械臂

在Mac上使用Docker構(gòu)建noVNC環(huán)境并運(yùn)行MyCobot
TMS320F2803x微控制器技術(shù)參考手冊

TMS320x2805x微控制器技術(shù)參考手冊
TMS320x2806x微控制器技術(shù)參考手冊
TMS320F280015x實(shí)時微控制器技術(shù)參考手冊
TMS320F28003x實(shí)時微控制器技術(shù)參考手冊
TMS320F28P65x實(shí)時微控制器技術(shù)參考手冊
TMS320F2837xD雙核實(shí)時微控制器技術(shù)參考手冊
TMS320F2807x實(shí)時微控制器技術(shù)參考手冊
TMS320F2837xS實(shí)時微控制器技術(shù)參考手冊
TMS320F280013x實(shí)時微控制器技術(shù)參考手冊
大象機(jī)器人開源協(xié)作機(jī)械臂myCobot 630 全面升級!
myCobot Pro 630 煥新上市!全面助力六自由度協(xié)作機(jī)器人商用化進(jìn)程推進(jìn)!
大象機(jī)器人六軸協(xié)作機(jī)械臂myCobot 320 進(jìn)行手勢識別!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論