") 使用MM32F0270 定時(shí)器DMA方式輸出PWM
使用MM32F0270 定時(shí)器DMA方式輸出PWM
對(duì)于控制步進(jìn)電機(jī)來說,最重要的控制參數(shù)是脈沖的數(shù)量和頻率,兩者結(jié)合可以實(shí)現(xiàn)滿足要求的電機(jī)加減速曲線。在一些電機(jī)應(yīng)用數(shù)量不多的場合,通常使用定時(shí)器中斷發(fā)送脈沖來控制步進(jìn)電機(jī),優(yōu)點(diǎn)是原理簡單代碼易于實(shí)現(xiàn)。但是一旦控制的電機(jī)多起來,就會(huì)占用大量的MCU資源,這在大多數(shù)情況下是不可接受的,更不用說多軸聯(lián)動(dòng)了。那么如何做到占用很少的MCU資源,又能實(shí)現(xiàn)脈沖發(fā)送的精確控制?
于是就想到了使用DMA功能更新PWM的輸出, DMA全稱Direct Memory Access,即直接存儲(chǔ)器訪問。DMA傳輸將數(shù)據(jù)從一個(gè)地址空間復(fù)制到另一個(gè)地址空間,提供在外設(shè)和存儲(chǔ)器之間或者存儲(chǔ)器和存儲(chǔ)器之間的高速數(shù)據(jù)傳輸。它允許不同速度的硬件裝置來溝通,而不需要依賴于MPU的大量中斷負(fù)載。
通過設(shè)置DMA傳輸數(shù)據(jù)的數(shù)量,可以控制發(fā)送的脈沖數(shù)。通過設(shè)置不同的裝載值和順序,可以使用不同頻率和脈寬。當(dāng)需要發(fā)送較多數(shù)量的脈沖時(shí),則可以使用DMA傳輸完成中斷中切換DMA傳輸?shù)臄?shù)據(jù)起始地址及發(fā)送數(shù)量,繼續(xù)發(fā)送。這個(gè)方法即方便,又減輕MPU的負(fù)擔(dān),可以同時(shí)驅(qū)動(dòng)多個(gè)電機(jī)工作,還可以根據(jù)電機(jī)的啟動(dòng)、運(yùn)行、停止使用不同的頻率。
定時(shí)器DMA模式
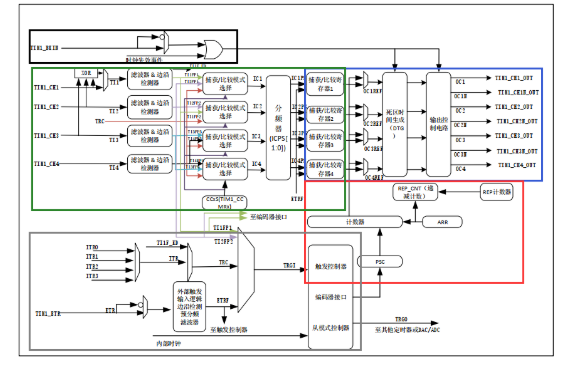
MM32F0270的定時(shí)器TIM1、TIM2、TIM3、TIM15、TIM16/17有DMA模式,能夠在發(fā)生單個(gè)事件時(shí)生成多個(gè)DMA 請(qǐng)求。主要目的是在沒有軟件開銷的情況下,多次重新編程定時(shí)器的一部分,也可以用于按周期讀取數(shù)個(gè)寄存器。下面以TIM1為例介紹:
TIM1_DCR 和 TIM1_DMAR 寄存器跟 DMA 模式相關(guān)。DMA 控制器的目標(biāo)是唯一的,必須指向TIM1_DMAR 寄存器。開啟 DMA 使能后,在給定的 TIM1 事件發(fā)生時(shí), TIM1 會(huì)給 DMA 發(fā)送請(qǐng)求。
對(duì) TIM1_DMAR 寄存器的每次寫操作都被重定向到一個(gè) TIM1 寄存器。TIM1_DCR寄存器的DBL位定義了DMA連續(xù)傳送的長度,即傳輸寄存器數(shù)量;當(dāng)對(duì)TIM1_DMAR進(jìn)行讀寫操作時(shí),定時(shí)器識(shí)別 DBL,確定傳輸?shù)募拇嫫鲾?shù)量。TIM1_DCR 寄存器的 DBA 位定義了DMA 傳輸?shù)幕刂罚?定義從 TIM1_CR1 寄存器地址開始的偏移量(00000 為 TIM1_CR1;00001 為TIM1_CR2;……; 00110 為 TIM1_CCMR1 等)。
通過定時(shí)器的DMA模式來更新PWM,本文參官網(wǎng)例程“TIM1_DMA_UPData”進(jìn)行說明具體實(shí)現(xiàn)方法。
實(shí)驗(yàn)
本實(shí)驗(yàn)使用TIM1的DMA模式,當(dāng)更新事件發(fā)生時(shí),更新 TIM1_CCR1、TIM1_CCR2 和 TIM1_CCR3 寄存器的內(nèi)容。程序中配置TIM1的通道1、通道2、通道3輸出PWM,再通過DMA搬運(yùn)數(shù)據(jù)來改變PWM的占空比。定時(shí)器每產(chǎn)生一個(gè)溢出事件(即計(jì)數(shù)完成),就發(fā)送DMA請(qǐng)求,根據(jù)數(shù)據(jù)在數(shù)組中的排列順序以生成所需要的時(shí)序。
程序部分
GPIO初始化
配置TIM1_CH1、TIM1_CH2 和 TIM1_CH3對(duì)應(yīng)的GPIO。
void TIM1_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_AHBPeriphClockCmd(RCC_AHBENR_GPIOA, ENABLE);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource8, GPIO_AF_2);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_2);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_2);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, GPIO_InitStruct);
}
TIM1 DMA初始化
TIM1_CH3對(duì)應(yīng)DMA1通道5,將data[]中的數(shù)據(jù)傳送到TIM1_DMAR寄存器,傳輸方向從存儲(chǔ)器到外設(shè),數(shù)據(jù)寬度為半字,使能DMA傳輸完成中斷。
void TIM_DMA_Init(void)
{
DMA_InitTypeDef DMA_InitStruct;
RCC_AHBPeriphClockCmd(RCC_AHBENR_DMA1, ENABLE);
DMA_DeInit(DMA1_Channel5);
DMA_StructInit( DMA_InitStruct);
//Transfer register address
DMA_InitStruct.DMA_PeripheralBaseAddr = (u32) (TIM1->DMAR);
//Transfer memory address
DMA_InitStruct.DMA_MemoryBaseAddr = (u32)data;
//Transfer direction, from memory to register
DMA_InitStruct.DMA_DIR = DMA_DIR_PeripheralDST;
DMA_InitStruct.DMA_BufferSize = 6;
DMA_InitStruct.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
//Transfer completed memory address increment
DMA_InitStruct.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStruct.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;
DMA_InitStruct.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;
DMA_InitStruct.DMA_Mode = DMA_Mode_Circular;
DMA_InitStruct.DMA_Priority = DMA_Priority_High;
DMA_InitStruct.DMA_M2M = DMA_M2M_Disable;
DMA_InitStruct.DMA_Auto_reload = DMA_Auto_Reload_Disable;
DMA_Init(DMA1_Channel5, DMA_InitStruct);
DMA_ITConfig(DMA1_Channel5, DMA_IT_TC, ENABLE);
}
TIM1 PWM初始化
TIM1輸出PWM,配置時(shí)鐘分頻系數(shù)和預(yù)裝載值,遞增計(jì)數(shù),使用PWM模式1,輸出高電平有效,分別對(duì)TIM1_CH1、TIM1_CH2、TIM1_CH3指定要加載到捕獲比較寄存器中的脈沖值為arr/2、arr/4、arr/6,使能TIM1的DMA模式,起始地址為TIM1_CCR1,傳輸長度為3。
void TIM1_PWM_Init(u16 arr, u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2ENR_TIM1, ENABLE);
TIM_TimeBaseStructInit( TIM_TimeBaseStruct);
TIM_TimeBaseStruct.TIM_Period = arr;
TIM_TimeBaseStruct.TIM_Prescaler = psc;
//Setting Clock Segmentation
TIM_TimeBaseStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStruct.TIM_RepetitionCounter = 0;
///TIM Upward Counting Mode
TIM_TimeBaseStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1, TIM_TimeBaseStruct);
TIM_OCStructInit( TIM_OCInitStruct);
//Select Timer Mode: TIM Pulse Width Modulation Mode 2
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;
//Setting the Pulse Value of the Capture Comparison Register to be Loaded
TIM_OCInitStruct.TIM_Pulse = arr / 2;
TIM_OC1Init(TIM1, TIM_OCInitStruct);
TIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_OCInitStruct.TIM_Pulse = arr / 4;
TIM_OC2Init(TIM1, TIM_OCInitStruct);
TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_OCInitStruct.TIM_Pulse = arr / 6;
TIM_OC3Init(TIM1, TIM_OCInitStruct);
TIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM1, ENABLE);
TIM_DMAConfig(TIM1, TIM_DMABase_CCR1, TIM_DMABurstLength_3Bytes);
TIM_DMACmd(TIM1, TIM_DMA_Update, ENABLE);
TIM_CtrlPWMOutputs(TIM1, ENABLE);
TIM_Cmd(TIM1, ENABLE);
}
使能DMA1通道5
DMA_Cmd(DMA1_Channel5, ENABLE);
配置NVIC
NVIC_Configure(DMA1_Channel4_5_6_7_IRQn, 1, 1);
DMA1中斷服務(wù)子程序
void DMA1_Channel4_5_6_7_IRQHandler()
{
if (DMA_GetITStatus(DMA1_IT_TC5)) {
//clear IRQ flag
DMA_ClearITPendingBit(DMA1_IT_TC5);
}
}
定義數(shù)組data[]
static u16 data[] = {2000, 3000, 4000, 8000, 7000, 6000};
Main()函數(shù)
s32 main(void)
{
TIM1_GPIO_Init();
TIM1_PWM_Init(10000, 0);
TIM_DMA_Init();
NVIC_Configure(DMA1_Channel4_5_6_7_IRQn, 1, 1);
DMA_Cmd(DMA1_Channel5, ENABLE);
while (1) {
}
}
演示
下載程序到目標(biāo)板。連接邏輯分析儀測試PA8、PA9、PA10的輸出,打開對(duì)應(yīng)上位機(jī)軟件啟動(dòng)采樣,運(yùn)行程序,各通道的PWM輸出情況如下:

截取其中1個(gè)周期觀察:

TIM1_CH1輸出PWM占空比為20%和80%, TIM1_CH1輸出PWM占空比為30%和70%, TIM1_CH1輸出PWM占空比為40%和60%,運(yùn)行結(jié)果和預(yù)期一致。
實(shí)驗(yàn)簡單演示了MM32F0270的定時(shí)器TIM1的DMA方式更新PWM,通過該方案可以實(shí)現(xiàn)多路、不同頻率、不同脈寬、數(shù)量精確可控的PWM波。
工程路徑如下:
~ MM32FMM32F0270_Lib_SamplesMM32F0270_SamplesLibSamplesTIMTIM1_DMA_UPData。
來源:靈動(dòng)MM32MCU
免責(zé)聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請(qǐng)聯(lián)系小編進(jìn)行處理
審核編輯 黃宇
-
PWM
+關(guān)注
關(guān)注
114文章
5196瀏覽量
214521 -
定時(shí)器
+關(guān)注
關(guān)注
23文章
3255瀏覽量
115157 -
dma
+關(guān)注
關(guān)注
3文章
566瀏覽量
100815
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
靈動(dòng)微課堂 (第196講) | 使用MM32F0270 LPTIM從STOP模式喚醒
靈動(dòng)微課堂 (第197講) | MM32F0270 UART空閑中斷 + DMA接收不定長數(shù)據(jù)
靈動(dòng)微課堂 (第198講) | 使用MM32F0270 LPUART從低功耗模式喚醒
靈動(dòng)微課堂 (第200講) | 使用MM32F0270 定時(shí)器DMA方式輸出PWM
靈動(dòng)微課堂 (第200講) | 使用MM32F0270 定時(shí)器DMA方式輸出PWM
STM32F030的定時(shí)器PWM使用設(shè)置與ADC的dma代碼
MM32F0140定時(shí)器模塊計(jì)數(shù)定時(shí)功能






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論