") 單片機開發(fā)中,傳感器的數(shù)據(jù)處理算法
單片機開發(fā)中,傳感器的數(shù)據(jù)處理算法
在傳感器使用中,我們常常需要對傳感器數(shù)據(jù)進行各種整理,讓應(yīng)用獲得更好的效果,以下介紹幾種常用的簡單處理方法:
加權(quán)平滑:平滑和均衡傳感器數(shù)據(jù),減小偶然數(shù)據(jù)突變的影響。
抽取突變:去除靜態(tài)和緩慢變化的數(shù)據(jù)背景,強調(diào)瞬間變化。
簡單移動平均線:保留數(shù)據(jù)流最近的K個數(shù)據(jù),取平均值。
下面,具體介紹一下這3種處理方法。
1、加權(quán)平滑
使用算法如下:
(新值) = (舊值)*(1 - a) + X * a其中a為設(shè)置的權(quán)值,X為最新數(shù)據(jù),程序?qū)崿F(xiàn)如下:
float ALPHA = 0.1f;
public void onSensorChanged(SensorEvent event){
x = event.values[0];
y = event.values[1];
z = event.values[2];
mLowPassX = lowPass(x,mLowPassX);
mLowPassY = lowPass(x,mLowPassY);
mLowPassZ = lowPass(x,mLowPassZ);
}
private float lowPass(float current,float last){
return last * (1.0f - ALPHA) + current * ALPHA;
}
2、抽取突變
此算法采用上面加權(quán)平滑的逆算法,實現(xiàn)代碼如下:
public void onSensorChanged(SensorEvent event){
final float ALPHA = 0.8;gravity[0] = ALPHA * gravity[0] + (1-ALPHA) * event.values[0];
gravity[1] = ALPHA * gravity[1] + (1-ALPHA) * event.values[1];
gravity[2] = ALPHA * gravity[2] + (1-ALPHA) * event.values[2];filteredValues[0] = event.values[0] - gravity[0];
filteredValues[1] = event.values[1] - gravity[1];
filteredValues[2] = event.values[2] - gravity[2];
}
3、簡單移動平均線
這個算法,保留傳感器數(shù)據(jù)流中最近的K個數(shù)據(jù),返回它們的平均值。k表示平均“窗口”的大小,實現(xiàn)代碼如下:
public class MovingAverage{
private float circularBuffer[]; //保存?zhèn)鞲衅髯罱腒個數(shù)據(jù)
private float avg; //返回到傳感器平均值
private float sum; //數(shù)值中傳感器數(shù)據(jù)的和
private float circularIndex; //傳感器數(shù)據(jù)數(shù)組節(jié)點位置
private int count;public MovingAverage(int k){
circularBuffer = new float[k];
count= 0;
circularIndex = 0;
avg = 0;
sum = 0;
}
public float getValue(){
return arg;
}
public long getCount(){
return count;
}
private void primeBuffer(float val){
for(int i=0;i= circularBuffer.length){
return 0;
}
return curIndex + 1;
}
public void pushValue(float x){
if(0 == count++){
primeBuffer(x);
}
float lastValue = circularBuffer[circularIndex];
circularBuffer[circularIndex] = x; //更新窗口中傳感器數(shù)據(jù)
sum -= lastValue; //更新窗口中傳感器數(shù)據(jù)和
sum += x;
avg = sum / circularBuffer.length; //計算得傳感器平均值
circularIndex = nextIndex(circularIndex);
}
};++i){>
來源:STM32嵌入式開發(fā)
免責(zé)聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權(quán)歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權(quán)問題,請聯(lián)系小編進行處理
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
傳感器
+關(guān)注
關(guān)注
2557文章
51757瀏覽量
758929 -
單片機
+關(guān)注
關(guān)注
6050文章
44705瀏覽量
641310 -
數(shù)據(jù)處理
+關(guān)注
關(guān)注
0文章
623瀏覽量
28737
發(fā)布評論請先 登錄
相關(guān)推薦
4~20mA傳感器數(shù)據(jù)處理新途徑
控制的許多應(yīng)用場合,都要使用傳感器來將單片機不能直接測量的信號換成單片機可以處理的電模擬信號,如壓力傳感器,溫度
發(fā)表于 12-16 10:31
電子稱重顯示器的數(shù)據(jù)處理方法
顯示器為例,介紹在電子秤中利用MCS-51系列單片機進行數(shù)據(jù)處理的方法.更多詳情:http://m.1cnz.cn/soft/31/2011/2011041919544
發(fā)表于 11-17 16:58
如何去使用數(shù)字信號處理算法
文章背景一直想學(xué)習(xí)一下數(shù)字信號處理算法,而不是每次遇到數(shù)據(jù)處理就求平均,求最值,看容差,做滑動窗。。。數(shù)字信號處理算法已經(jīng)很成熟了,但網(wǎng)上大部分還是用matlab跑仿真,設(shè)計幾個不同頻率的sin信號
發(fā)表于 08-09 08:23
FCS中的智能傳感器的數(shù)據(jù)處理方法
FCS 是工業(yè)過程控制系統(tǒng)的必然趨勢,就系統(tǒng)中的智能傳感器進行結(jié)構(gòu)分析,并根據(jù)其特點,論述并分析了其數(shù)據(jù)處理方法的特性,并提出了一些具有先進性的數(shù)據(jù)處理方法,對
發(fā)表于 07-09 13:55
?18次下載
基于單片機的氣敏傳感器測試系統(tǒng)
本文介紹一種新型的氣敏傳感器測試系統(tǒng)的設(shè)計方法。該系統(tǒng)基于具有語音處理功能的凌陽SPCE061A單片機,能同時進行多路傳感器測試、過程控制,及用虛擬儀器完成
發(fā)表于 05-13 16:39
?145次下載
智能儀器的數(shù)據(jù)處理算法
測量精度和可靠性是儀器的重要指標(biāo),引入數(shù)據(jù)處理算法后,使許多原來靠硬件電路難以實現(xiàn)的信號處理問題得以解決,從而克服和彌補了包括傳感器在內(nèi)的各個測量環(huán)節(jié)中硬件本身的
發(fā)表于 12-01 16:06
?93次下載

基于部分存儲和選擇性加載的數(shù)據(jù)處理算法
根據(jù)電能質(zhì)量系統(tǒng)中監(jiān)測數(shù)據(jù)海量化的趨勢,提出了一種基于部分存儲和選擇性加載的數(shù)據(jù)處理算法,徹底解決了現(xiàn)有數(shù)據(jù)處理算法中重復(fù)排序和多余
發(fā)表于 12-19 18:50
?0次下載
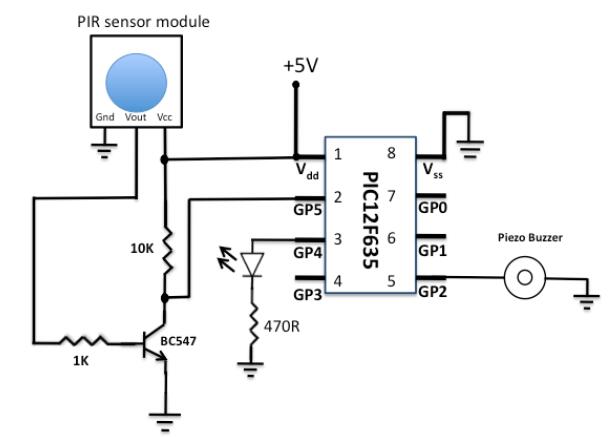
使用PIC單片機開發(fā)的被動紅外傳感器模塊的報警器
在本文中,單片機開發(fā)工程師們分享了一個使用PIC單片機開發(fā)的被動紅外(PIR)傳感器模塊的報警器
發(fā)表于 06-29 10:30
?2866次閱讀
淺析單片機開發(fā)中傳感器的數(shù)據(jù)處理算法
在傳感器使用中,我們常常需要對傳感器數(shù)據(jù)進行各種整理,讓應(yīng)用獲得更好的效果,以下介紹幾種常用的簡單處理方法: 加權(quán)平滑:平滑和均衡
紅外雨量計(光學(xué)雨量傳感器)不同雨量場景如何優(yōu)化數(shù)據(jù)處理算法
紅外雨量計(光學(xué)雨量傳感器)不同雨量場景如何優(yōu)化數(shù)據(jù)處理算法 紅外雨量計是一種常用于雨量觀測和監(jiān)測的儀器。它通過感測雨滴落入雨斗的時間和數(shù)量,來計算出雨量數(shù)據(jù)。在不同的雨量場景下,紅外雨量計

八位單片機的大數(shù)處理算法及在數(shù)控中的應(yīng)用
電子發(fā)燒友網(wǎng)站提供《八位單片機的大數(shù)處理算法及在數(shù)控中的應(yīng)用.pdf》資料免費下載
發(fā)表于 10-25 10:09
?0次下載






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論