 圖像銳化的Sobel、Laplacian算子基礎知識介紹
圖像銳化的Sobel、Laplacian算子基礎知識介紹
一.Sobel 算子
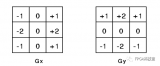
Sobel 算子是一種用于邊緣檢測的離散微分算子,它結合了高斯平滑和微分求導。該算子用于計算圖像明暗程度近似值,根據圖像邊緣旁邊明暗程度把該區域內超過某個數的特定點記為邊緣。Sobel 算子在 Prewitt 算子的基礎上增加了權重的概念,認為相鄰點的距離遠近對當前像素點的影響是不同的,距離越近的像素點對應當前像素的影響越大,從而實現圖像銳化并突出邊緣輪廓 [1-4]。
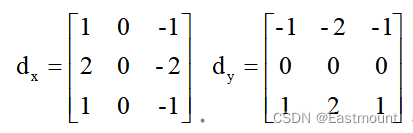
Sobel 算子的邊緣定位更準確,常用于噪聲較多、灰度漸變的圖像。其算法模板如公式(1)所示,其中 dx 表示水平方向,dy 表示垂直方向 [3]。
其像素計算公式如下:
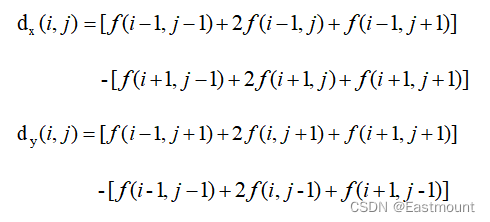
Sobel 算子像素的最終計算公式如下:
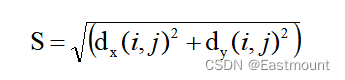
Sobel 算子根據像素點上下、左右鄰點灰度加權差,在邊緣處達到極值這一現象檢測邊緣。對噪聲具有平滑作用,提供較為精確的邊緣方向信息。因為 Sobel 算子結合了高斯平滑和微分求導(分化),因此結果會具有更多的抗噪性,當對精度要求不是很高時,Sobel 算子是一種較為常用的邊緣檢測方法。
Python 和 OpenCV 將 Sobel 算子封裝在 Sobel () 函數中,其函數原型如下所示:
dst = Sobel(src, ddepth, dx, dy[, dst[, ksize[, scale[, delta[, borderType]]]]])
– src 表示輸入圖像
– dst 表示輸出的邊緣圖,其大小和通道數與輸入圖像相同
– ddepth 表示目標圖像所需的深度,針對不同的輸入圖像,輸出目標圖像有不同的深度
– dx 表示 x 方向上的差分階數,取值 1 或 0
– dy 表示 y 方向上的差分階數,取值 1 或 0
– ksize 表示 Sobel 算子的大小,其值必須是正數和奇數
– scale 表示縮放導數的比例常數,默認情況下沒有伸縮系數
– delta 表示將結果存入目標圖像之前,添加到結果中的可選增量值
– borderType 表示邊框模式,更多詳細信息查閱 BorderTypes
注意,在進行 Sobel 算子處理之后,還需要調用 convertScaleAbs () 函數計算絕對值,并將圖像轉換為 8 位圖進行顯示。其算法原型如下:
dst = convertScaleAbs(src[, dst[, alpha[, beta]]])
– src 表示原數組
– dst 表示輸出數組,深度為 8 位
– alpha 表示比例因子
– beta 表示原數組元素按比例縮放后添加的值
Sobel 算子的實現代碼如下所示。
# -*- coding: utf-8 -*- # By:Eastmount import cv2 import numpy as np import matplotlib.pyplot as plt #讀取圖像 img = cv2.imread('luo.png') lenna_img = cv2.cvtColor(img,cv2.COLOR_BGR2RGB) #灰度化處理圖像 grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) #Sobel算子 x = cv2.Sobel(grayImage, cv2.CV_16S, 1, 0) #對x求一階導 y = cv2.Sobel(grayImage, cv2.CV_16S, 0, 1) #對y求一階導 absX = cv2.convertScaleAbs(x) absY = cv2.convertScaleAbs(y) Sobel = cv2.addWeighted(absX, 0.5, absY, 0.5, 0) #用來正常顯示中文標簽 plt.rcParams['font.sans-serif']=['SimHei'] #顯示圖形 titles = ['原始圖像', 'Sobel算子'] images = [lenna_img, Sobel] for i in range(2): plt.subplot(1,2,i+1), plt.imshow(images[i], 'gray') plt.title(titles[i]) plt.xticks([]),plt.yticks([]) plt.show()其運行結果如圖 1 所示:

二.Laplacian 算子
拉普拉斯(Laplacian)算子是 n 維歐幾里德空間中的一個二階微分算子,常用于圖像增強領域和邊緣提取。它通過灰度差分計算鄰域內的像素,基本流程是:
判斷圖像中心像素灰度值與它周圍其他像素的灰度值;
如果中心像素的灰度更高,則提升中心像素的灰度;
反之降低中心像素的灰度,從而實現圖像銳化操作。
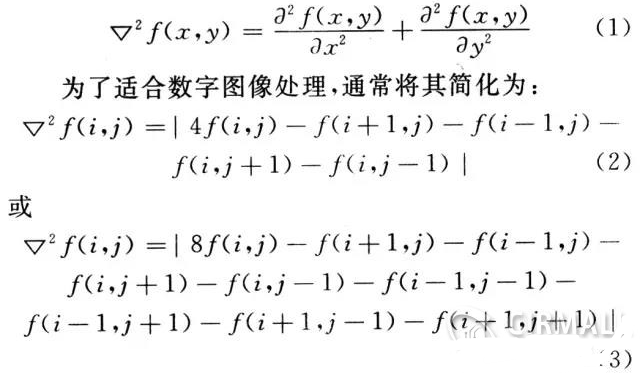
在算法實現過程中,Laplacian 算子通過對鄰域中心像素的四方向或八方向求梯度,再將梯度相加起來判斷中心像素灰度與鄰域內其他像素灰度的關系,最后通過梯度運算的結果對像素灰度進行調整 [2]。 一個連續的二元函數 f (x,y),其拉普拉斯運算定義為: 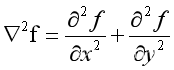 Laplacian 算子分為四鄰域和八鄰域,四鄰域是對鄰域中心像素的四方向求梯度,八鄰域是對八方向求梯度。其中,四鄰域模板如公式(5)所示:
Laplacian 算子分為四鄰域和八鄰域,四鄰域是對鄰域中心像素的四方向求梯度,八鄰域是對八方向求梯度。其中,四鄰域模板如公式(5)所示:  其像素的計算公式可以簡化為:
其像素的計算公式可以簡化為:  通過模板可以發現,當鄰域內像素灰度相同時,模板的卷積運算結果為 0;當中心像素灰度高于鄰域內其他像素的平均灰度時,模板的卷積運算結果為正數;當中心像素的灰度低于鄰域內其他像素的平均灰度時,模板的卷積為負數。對卷積運算的結果用適當的衰弱因子處理并加在原中心像素上,就可以實現圖像的銳化處理。 Laplacian 算子的八鄰域模板如下:
通過模板可以發現,當鄰域內像素灰度相同時,模板的卷積運算結果為 0;當中心像素灰度高于鄰域內其他像素的平均灰度時,模板的卷積運算結果為正數;當中心像素的灰度低于鄰域內其他像素的平均灰度時,模板的卷積為負數。對卷積運算的結果用適當的衰弱因子處理并加在原中心像素上,就可以實現圖像的銳化處理。 Laplacian 算子的八鄰域模板如下:  其像素的計算公式可以簡化為:
其像素的計算公式可以簡化為:
Python 和 OpenCV 將 Laplacian 算子封裝在 Laplacian () 函數中,其函數原型如下所示:
dst = Laplacian(src, ddepth[, dst[, ksize[, scale[, delta[, borderType]]]]])
– src 表示輸入圖像
– dst 表示輸出的邊緣圖,其大小和通道數與輸入圖像相同
– ddepth 表示目標圖像所需的深度
– ksize 表示用于計算二階導數的濾波器的孔徑大小,其值必須是正數和奇數,且默認值為 1,更多詳細信息查閱 getDerivKernels
– scale 表示計算拉普拉斯算子值的可選比例因子。默認值為 1,更多詳細信息查閱 getDerivKernels
– delta 表示將結果存入目標圖像之前,添加到結果中的可選增量值,默認值為 0
– borderType 表示邊框模式,更多詳細信息查閱 BorderTypes
注意,Laplacian 算子其實主要是利用 Sobel 算子的運算,通過加上 Sobel 算子運算出的圖像 x 方向和 y 方向上的導數,得到輸入圖像的圖像銳化結果。 同時,在進行 Laplacian 算子處理之后,還需要調用 convertScaleAbs () 函數計算絕對值,并將圖像轉換為 8 位圖進行顯示。其算法原型如下:
dst = convertScaleAbs(src[, dst[, alpha[, beta]]])
– src 表示原數組
– dst 表示輸出數組,深度為 8 位
– alpha 表示比例因子
– beta 表示原數組元素按比例縮放后添加的值
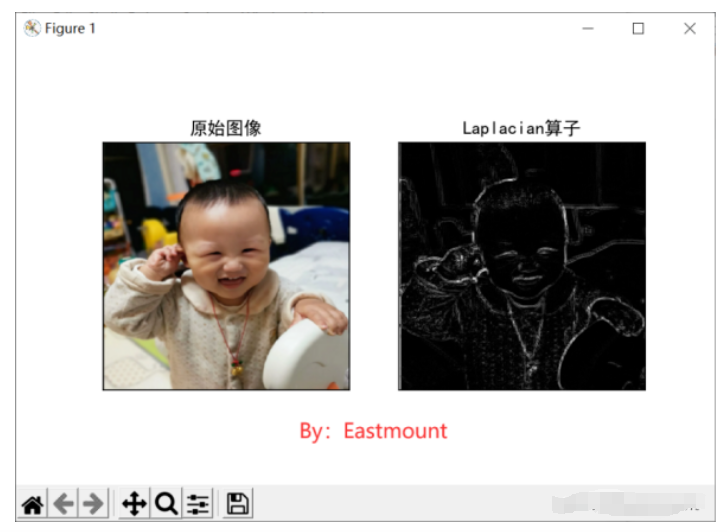
當 ksize=1 時,Laplacian () 函數采用 3×3 的孔徑(四鄰域模板)進行變換處理。下面的代碼是采用 ksize=3 的 Laplacian 算子進行圖像銳化處理,其代碼如下:
# -*- coding: utf-8 -*-
# By:Eastmount
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取圖像
img = cv2.imread('luo.png')
lenna_img = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
#灰度化處理圖像
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#拉普拉斯算法
dst = cv2.Laplacian(grayImage, cv2.CV_16S, ksize = 3)
Laplacian = cv2.convertScaleAbs(dst)
#用來正常顯示中文標簽
plt.rcParams['font.sans-serif']=['SimHei']
#顯示圖形
titles = ['原始圖像', 'Laplacian算子']
images = [lenna_img, Laplacian]
for i in range(2):
plt.subplot(1,2,i+1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
其運行結果如圖 2 所示:
邊緣檢測算法主要是基于圖像強度的一階和二階導數,但導數通常對噪聲很敏感,因此需要采用濾波器來過濾噪聲,并調用圖像增強或閾值化算法進行處理,最后再進行邊緣檢測。下面是采用高斯濾波去噪和閾值化處理之后,再進行邊緣檢測的過程,并對比了四種常見的邊緣提取算法。
# -*- coding: utf-8 -*-
# By:Eastmount
import cv2
import numpy as np
import matplotlib.pyplot as plt
#讀取圖像
img = cv2.imread('luo.png')
lenna_img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
#灰度化處理圖像
grayImage = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#高斯濾波
gaussianBlur = cv2.GaussianBlur(grayImage, (3,3), 0)
#閾值處理
ret, binary = cv2.threshold(gaussianBlur, 127, 255, cv2.THRESH_BINARY)
#Roberts算子
kernelx = np.array([[-1,0],[0,1]], dtype=int)
kernely = np.array([[0,-1],[1,0]], dtype=int)
x = cv2.filter2D(binary, cv2.CV_16S, kernelx)
y = cv2.filter2D(binary, cv2.CV_16S, kernely)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Roberts = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
#Prewitt算子
kernelx = np.array([[1,1,1],[0,0,0],[-1,-1,-1]], dtype=int)
kernely = np.array([[-1,0,1],[-1,0,1],[-1,0,1]], dtype=int)
x = cv2.filter2D(binary, cv2.CV_16S, kernelx)
y = cv2.filter2D(binary, cv2.CV_16S, kernely)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Prewitt = cv2.addWeighted(absX,0.5,absY,0.5,0)
#Sobel算子
x = cv2.Sobel(binary, cv2.CV_16S, 1, 0)
y = cv2.Sobel(binary, cv2.CV_16S, 0, 1)
absX = cv2.convertScaleAbs(x)
absY = cv2.convertScaleAbs(y)
Sobel = cv2.addWeighted(absX, 0.5, absY, 0.5, 0)
#拉普拉斯算法
dst = cv2.Laplacian(binary, cv2.CV_16S, ksize = 3)
Laplacian = cv2.convertScaleAbs(dst)
#效果圖
titles = ['Source Image', 'Binary Image', 'Roberts Image',
'Prewitt Image','Sobel Image', 'Laplacian Image']
images = [lenna_img, binary, Roberts, Prewitt, Sobel, Laplacian]
for i in np.arange(6):
plt.subplot(2,3,i+1),plt.imshow(images[i],'gray')
plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
輸出結果如圖 3 所示。其中,Laplacian 算子對噪聲比較敏感,由于其算法可能會出現雙像素邊界,常用來判斷邊緣像素位于圖像的明區或暗區,很少用于邊緣檢測;Robert 算子對陡峭的低噪聲圖像效果較好,尤其是邊緣正負 45 度較多的圖像,但定位準確率較差;Prewitt 算子對灰度漸變的圖像邊緣提取效果較好,而沒有考慮相鄰點的距離遠近對當前像素點的影響;Sobel 算子考慮了綜合因素,對噪聲較多的圖像處理效果更好。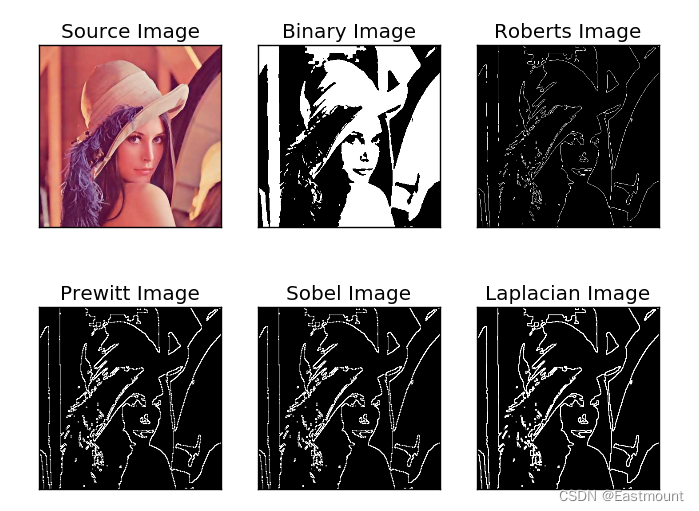
三、總結
本文主要介紹圖像銳化和邊緣檢測知識,詳細講解了 Sobel 算子和 Laplacian 算子,并通過小珞珞圖像進行邊緣輪廓提取。圖像銳化和邊緣提取技術可以消除圖像中的噪聲,提取圖像信息中用來表征圖像的一些變量,為圖像識別提供基礎。
審核編輯:劉清
-
濾波器
+關注
關注
161文章
7859瀏覽量
178697 -
邊緣檢測
+關注
關注
0文章
92瀏覽量
18231 -
拉普拉斯
+關注
關注
0文章
35瀏覽量
9675 -
OpenCV
+關注
關注
31文章
635瀏覽量
41462 -
python
+關注
關注
56文章
4807瀏覽量
84952
原文標題:詳解圖像銳化的Sobel、Laplacian算子
文章出處:【微信號:OSC開源社區,微信公眾號:OSC開源社區】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
基于 DSP5509 進行數字圖像處理中 Sobel 算子邊緣檢測的硬件連接電路圖
基于FPGA的Sobel邊緣檢測的實現
基于FPGA的圖像拉普拉斯銳化處理
源碼交流=圖像處理 實現圖像去噪、濾波、銳化、邊緣檢測
Labview圖像處理——邊緣檢測
迅為iTOP-RK3568開發板Sobel 算子邊緣檢測

基于拉普拉斯算法的圖像銳化算法實現

Laplacian算子的FPGA實現方法
淺述Sobel算子在HLS上的實現教程





 工商網監
工商網監
評論