") 高性能力反饋方向盤MXsteerWheel,線控轉(zhuǎn)向系統(tǒng)開發(fā)的新幫手
高性能力反饋方向盤MXsteerWheel,線控轉(zhuǎn)向系統(tǒng)開發(fā)的新幫手
高性能力反饋方向盤MXsteerWheel相信大家已經(jīng)期待許久了,今天小編就為大家?guī)鞰XsteerWheel的產(chǎn)品介紹,以及基于MXsteerWheel的完整轉(zhuǎn)向手感解決方案。
簡(jiǎn) 介
線控轉(zhuǎn)向的興起,使得精確地仿真方向盤反饋愈發(fā)重要。良好的方向盤反饋能為駕駛員提供良好的轉(zhuǎn)向手感,讓駕駛員清楚地了解車身狀態(tài),從而采取合適的車輛操作。
轉(zhuǎn)向手感解決方案應(yīng)當(dāng)能滿足測(cè)試和開發(fā)需求。小編從以往的項(xiàng)目經(jīng)驗(yàn)總結(jié)出以下關(guān)鍵點(diǎn):
在早期定義需求,能夠減少開發(fā)成本和時(shí)間
真實(shí)、全面地模擬方向盤行為
穩(wěn)定的仿真模型,仿真真實(shí)的轉(zhuǎn)向手感
能夠支持未來ADAS功能開發(fā)
為此MdynamiX公司推出了高性能力反饋方向盤MXsteerWheel提供獨(dú)一無二的轉(zhuǎn)向手感,并且在模型在環(huán)、車輛動(dòng)力學(xué)以及ADAS功能方面均有關(guān)鍵應(yīng)用。
接下來,本文將從MXsteerWheel的典型案例出發(fā)介紹它的核心構(gòu)成,然后展示整體的系統(tǒng)框架,最后展示詳細(xì)配置參數(shù)。 桌面式駕駛模擬器
桌面式駕駛模擬器
MXsteerWheel的典型案例之一是桌面式駕駛模擬器。
MXsteerWheel作為高性能力反饋方向盤,既能快速響應(yīng)駕駛員的轉(zhuǎn)向輸入,也能將高精度的力實(shí)時(shí)反饋給駕駛員,帶來真實(shí)的轉(zhuǎn)向手感,再通過EtherCAT總線與車輛動(dòng)力學(xué)軟件及轉(zhuǎn)向模型形成虛擬車輛仿真環(huán)境,實(shí)現(xiàn)真實(shí)反饋轉(zhuǎn)向手感的駕駛模擬效果。 圖片說明:車輛動(dòng)力學(xué)軟件為Vector DYNA4,殘余總線仿真工具為Vector VN8914
圖片說明:車輛動(dòng)力學(xué)軟件為Vector DYNA4,殘余總線仿真工具為Vector VN8914
僅需簡(jiǎn)單的幾個(gè)步驟就可以將MXsteerWheel固定在桌面上,高集成度、緊湊的結(jié)構(gòu)使得獲取真實(shí)轉(zhuǎn)向手感的更加便捷、高效,從而更好地支持相關(guān)產(chǎn)品的研發(fā)、測(cè)試。 專業(yè)的轉(zhuǎn)向模型
專業(yè)的轉(zhuǎn)向模型
實(shí)現(xiàn)真實(shí)可靠的駕駛模擬,除了高性能力反饋方向盤,專業(yè)、準(zhǔn)確、應(yīng)用廣泛的轉(zhuǎn)向模型也是不可或缺的。 
由Pfeffer教授團(tuán)隊(duì)開發(fā)的專業(yè)轉(zhuǎn)向模型Pfeffer MXsteering Model具有以下特點(diǎn):
實(shí)時(shí)的三自由度模型,模型實(shí)現(xiàn)達(dá)到部件級(jí)
用于EPS和HPS的轉(zhuǎn)向手感仿真和分析
兼容簡(jiǎn)化或者復(fù)雜建模的轉(zhuǎn)向助力模塊
支持參數(shù)化通用參數(shù)集
除了以上特點(diǎn),該模型還可以集成ADAS接口,或自定義ECU功能,如反饋手感算法,全面支持車輛開發(fā)、測(cè)試的定制需求。同時(shí)可以無縫集成到各商用車輛動(dòng)力學(xué)模型軟件,形成完善的虛擬車輛仿真環(huán)境。 系統(tǒng)框架
系統(tǒng)框架
了解了專業(yè)的轉(zhuǎn)向模型后,接下來從整體的角度,看一下以MXsteerWheel為核心的轉(zhuǎn)向手感解決方案的系統(tǒng)框圖: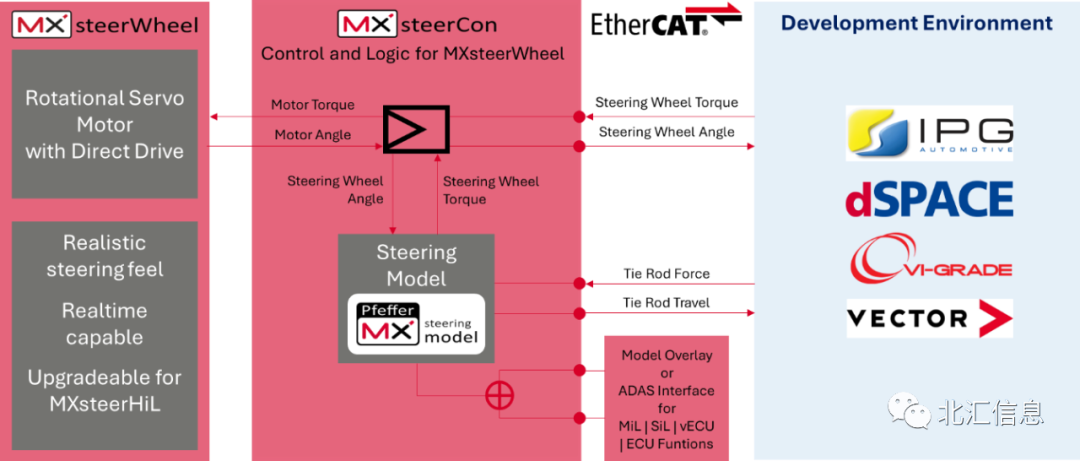 MXsteerCon作為控制邏輯單元,接收MXsteerWheel的方向盤角度輸入,并輸出模型計(jì)算出的方向盤力矩給MXsteerWheel,MXsteerWheel執(zhí)行此力矩就表現(xiàn)為轉(zhuǎn)向手感。
MXsteerCon作為控制邏輯單元,接收MXsteerWheel的方向盤角度輸入,并輸出模型計(jì)算出的方向盤力矩給MXsteerWheel,MXsteerWheel執(zhí)行此力矩就表現(xiàn)為轉(zhuǎn)向手感。
而來自MXsteerWheel的方向盤角度,經(jīng)過內(nèi)嵌于MXsteerCon內(nèi)的轉(zhuǎn)向模型計(jì)算,產(chǎn)生相應(yīng)的轉(zhuǎn)向拉桿位移輸入給車輛動(dòng)力學(xué)模型,車輛動(dòng)力學(xué)模型根據(jù)路面、整車參數(shù)等計(jì)算得出拉桿端負(fù)載力和反饋給方向盤的力矩,最終影響了MXsteerWheel的轉(zhuǎn)向手感。
最后,值得一提的是Pfeffer MXsteering Model提供了接口可以支持模型覆蓋、ADAS在各層級(jí)的功能,這意味著轉(zhuǎn)向模型可以支持不同廠商對(duì)車輛開發(fā)、測(cè)試的定制需求。
MXsteerWheel具有實(shí)時(shí)能力,提供真實(shí)的轉(zhuǎn)向手感,除了桌面式駕駛模擬的典型案例,還支持升級(jí)與MXsteerHiL聯(lián)用。 圖片說明:左側(cè)MXsteerWheel與MXsteerHiL聯(lián)用組成靜態(tài)駕駛模擬,右側(cè)MXsteerWheel桌面式駕駛模擬
圖片說明:左側(cè)MXsteerWheel與MXsteerHiL聯(lián)用組成靜態(tài)駕駛模擬,右側(cè)MXsteerWheel桌面式駕駛模擬 RTpro & RTpro+
RTpro & RTpro+
目前MXsteerWheel提供兩種配置: MXsteerWheel RTpro和MXsteerWheel RTpro+
MXsteerWheel RTpro提供最大27Nm的扭矩,可以覆蓋通用車輛開發(fā)、測(cè)試中的全場(chǎng)景,如行駛工況、停車工況、智駕輔助工況等。
MXsteerWheel RTpro+提供最大54Nm的扭矩,是特別研制的產(chǎn)品。用于支持賽車極限工況下的開發(fā)、測(cè)試。
以下是兩種配置的詳細(xì)參數(shù):
參數(shù) | ||
MXsteerWheel RTpro | MXsteerWheel RTpro+ | |
執(zhí)行器類型 | 直驅(qū)旋轉(zhuǎn)伺服電機(jī) | 直驅(qū)旋轉(zhuǎn)伺服電機(jī) |
執(zhí)行器尺寸 | 150mm x 140mm | 150mm x 140mm |
額定輸出扭矩 | ±11.0 Nm | ±21.0 Nm |
最大輸出扭矩 | ±27.0 Nm | ±54.0 Nm |
額定轉(zhuǎn)速 | ±6000°/s | ±6000°/s |
角度測(cè)量 | 集成絕對(duì)角度位置編碼器精度±0.0001° | 集成絕對(duì)角度位置編碼器精度±0.0001° |
齒隙 | 無 | 無 |
周期 | ≤0.25 ms | ≤0.25 ms |
扭矩測(cè)量 | 可選 | 可選 |
 結(jié) 語(yǔ)
結(jié) 語(yǔ)
以上就是本次MXsteerWheel產(chǎn)品及轉(zhuǎn)向手感解決方案的介紹了。歡迎大家多多關(guān)注后續(xù)的產(chǎn)品介紹。
MdynamiX公司成立于2014年,創(chuàng)始人為來自寶馬、Tüv Süd等的技術(shù)專家,總部位于德國(guó)貝寧根,主要研究高級(jí)駕駛輔助系統(tǒng)和自動(dòng)駕駛;在慕尼黑有分部,主要研究車輛動(dòng)力學(xué)、車輛舒適性、聲學(xué)和NVH技術(shù);是全球知名的、行業(yè)領(lǐng)先的駕駛體驗(yàn)服務(wù)商,在轉(zhuǎn)向手感、NVH、智駕舒適體驗(yàn)等領(lǐng)域均有卓越的產(chǎn)品,已經(jīng)全球?yàn)槎嗉襉EM、Tier1提供產(chǎn)品服務(wù),如保時(shí)捷、BMW、博世、ZF、KIA等。
北匯信息作為汽車電子測(cè)試全產(chǎn)品服務(wù)商,在國(guó)內(nèi)是MdynamiX的重要合作伙伴,致力于為客戶提供專業(yè)、高效的底盤測(cè)試解決方案。
-
仿真
+關(guān)注
關(guān)注
50文章
4099瀏覽量
133712 -
轉(zhuǎn)向系統(tǒng)
+關(guān)注
關(guān)注
0文章
50瀏覽量
10249 -
汽車
+關(guān)注
關(guān)注
13文章
3537瀏覽量
37410
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
鴻蒙原生頁(yè)面高性能解決方案上線OpenHarmony社區(qū) 助力打造高性能原生應(yīng)用
蔚來ET9獲線控轉(zhuǎn)向技術(shù)量產(chǎn)許可
嵌入式系統(tǒng)開發(fā)中的測(cè)試方法 嵌入式系統(tǒng)開發(fā)與AI結(jié)合應(yīng)用
SBW線控轉(zhuǎn)向系統(tǒng)HiL測(cè)試解決方案

“亦”真“亦”假?——MXsteerWheel與DYNA4的強(qiáng)強(qiáng)聯(lián)手
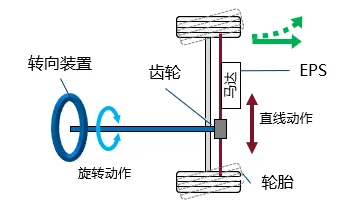
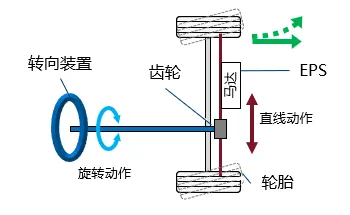
什么是EPS?通過馬達(dá)來輔助轉(zhuǎn)向操作的系統(tǒng)
電容感應(yīng)方向盤能用什么避開
特斯拉發(fā)布無人駕駛出租車,沒有方向盤和踏板
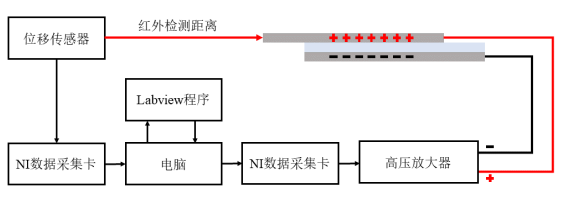
Aigtek高壓放大器在靜電吸附的觸覺力反饋研究中的應(yīng)用
松下課堂 什么是EPS?通過馬達(dá)來輔助轉(zhuǎn)向操作的系統(tǒng)
慕尼黑上海電子展看點(diǎn):奧迪威發(fā)布方向盤觸覺固態(tài)按鈕方案!

線控轉(zhuǎn)向技術(shù):自動(dòng)駕駛中路徑與方向的精準(zhǔn)駕馭

智己L6車型駕駛艙公布:提供半幅 / 全幅方向盤、可升降超長(zhǎng)大屏
什么是線控轉(zhuǎn)向系統(tǒng)?線控轉(zhuǎn)向技術(shù)淺析

單極霍爾開關(guān)AH503可用于汽車方向盤,可替換HAL1503





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論