") SOC設(shè)計(jì)中的同步復(fù)位和異步復(fù)位有哪些應(yīng)用呢?
SOC設(shè)計(jì)中的同步復(fù)位和異步復(fù)位有哪些應(yīng)用呢?
在SOC設(shè)計(jì)中,復(fù)位電路是一個(gè)關(guān)鍵部分,它確保了芯片中各個(gè)模塊在初始化和運(yùn)行時(shí)能夠處于一致的狀態(tài)。復(fù)位電路通常包括同步復(fù)位和異步復(fù)位兩種類(lèi)型。本文將詳細(xì)介紹這兩種復(fù)位方式的概念、原理以及在SOC設(shè)計(jì)中的應(yīng)用。
一、同步復(fù)位
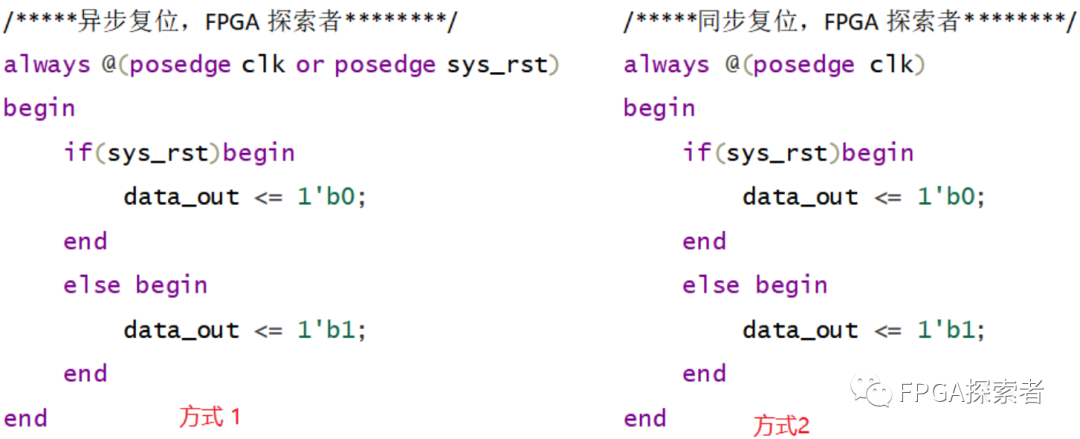
同步復(fù)位是指復(fù)位信號(hào)與系統(tǒng)時(shí)鐘信號(hào)同步的復(fù)位方法。在同步復(fù)位中,復(fù)位信號(hào)通常是由系統(tǒng)時(shí)鐘信號(hào)經(jīng)過(guò)一定的邏輯處理得到的。當(dāng)系統(tǒng)時(shí)鐘信號(hào)發(fā)生變化時(shí),復(fù)位信號(hào)也會(huì)隨之發(fā)生變化。由于復(fù)位信號(hào)與系統(tǒng)時(shí)鐘信號(hào)同步,因此,在時(shí)鐘信號(hào)的上升沿或下降沿,系統(tǒng)會(huì)進(jìn)行復(fù)位操作。
同步復(fù)位的原理相對(duì)簡(jiǎn)單,它能夠確保在時(shí)鐘信號(hào)的每個(gè)周期內(nèi)只進(jìn)行一次復(fù)位操作,從而避免了因多次復(fù)位而產(chǎn)生的系統(tǒng)不穩(wěn)定問(wèn)題。此外,由于復(fù)位信號(hào)與系統(tǒng)時(shí)鐘信號(hào)相關(guān),因此,在系統(tǒng)運(yùn)行過(guò)程中,復(fù)位信號(hào)能夠保持穩(wěn)定,不會(huì)出現(xiàn)頻繁的跳變。
在SOC設(shè)計(jì)中,同步復(fù)位通常應(yīng)用于對(duì)時(shí)序要求較高的模塊,如處理器、存儲(chǔ)器等。這些模塊需要確保在每個(gè)時(shí)鐘周期內(nèi)都能夠正確地執(zhí)行指令,因此需要穩(wěn)定的復(fù)位信號(hào)來(lái)確保其初始狀態(tài)的一致性。
二、異步復(fù)位
異步復(fù)位是指復(fù)位信號(hào)與系統(tǒng)時(shí)鐘信號(hào)不同步的復(fù)位方法。在異步復(fù)位中,復(fù)位信號(hào)可以由其他模塊或外部輸入得到,不依賴(lài)于系統(tǒng)時(shí)鐘信號(hào)。當(dāng)復(fù)位信號(hào)發(fā)生變化時(shí),系統(tǒng)會(huì)立即進(jìn)行復(fù)位操作。
異步復(fù)位的優(yōu)點(diǎn)在于它可以對(duì)系統(tǒng)中的異常事件進(jìn)行快速響應(yīng)。由于復(fù)位信號(hào)與系統(tǒng)時(shí)鐘信號(hào)不相關(guān),因此,當(dāng)系統(tǒng)中出現(xiàn)異常時(shí),復(fù)位信號(hào)可以迅速傳遞給各個(gè)模塊,從而實(shí)現(xiàn)快速響應(yīng)和系統(tǒng)穩(wěn)定性保障。
然而,異步復(fù)位也存在一些問(wèn)題。由于復(fù)位信號(hào)可能隨時(shí)發(fā)生跳變,因此,在系統(tǒng)運(yùn)行過(guò)程中,復(fù)位信號(hào)可能會(huì)出現(xiàn)頻繁的跳變。這可能會(huì)導(dǎo)致系統(tǒng)不穩(wěn)定或出現(xiàn)意外的行為。此外,由于異步復(fù)位不受系統(tǒng)時(shí)鐘的控制,因此,在復(fù)位過(guò)程中可能會(huì)產(chǎn)生潛在的競(jìng)態(tài)條件或冒險(xiǎn)行為。
在SOC設(shè)計(jì)中,異步復(fù)位通常應(yīng)用于對(duì)時(shí)序要求較低的模塊,如輸入輸出接口、傳感器等。這些模塊需要快速響應(yīng)外部事件,但不需要保證在每個(gè)時(shí)鐘周期內(nèi)都能夠正確地執(zhí)行指令。因此,相對(duì)較慢的系統(tǒng)時(shí)鐘信號(hào)不會(huì)對(duì)它們?cè)斐商笥绊憽?br />
三、同步復(fù)位與異步復(fù)位的區(qū)別
同步復(fù)位和異步復(fù)位的區(qū)別主要體現(xiàn)在以下幾個(gè)方面:
時(shí)序關(guān)系:同步復(fù)位受系統(tǒng)時(shí)鐘信號(hào)的控制,復(fù)位信號(hào)與系統(tǒng)時(shí)鐘信號(hào)同步;而異步復(fù)位不受系統(tǒng)時(shí)鐘信號(hào)的控制,復(fù)位信號(hào)可以隨時(shí)發(fā)生跳變。
系統(tǒng)穩(wěn)定性:由于同步復(fù)位能夠確保在每個(gè)時(shí)鐘周期內(nèi)只進(jìn)行一次復(fù)位操作,因此能夠提高系統(tǒng)的穩(wěn)定性;而異步復(fù)位可能導(dǎo)致復(fù)位信號(hào)頻繁跳變,從而影響系統(tǒng)穩(wěn)定性。
響應(yīng)速度:由于同步復(fù)位需要等待時(shí)鐘信號(hào)的變化才能進(jìn)行復(fù)位操作,因此響應(yīng)速度相對(duì)較慢;而異步復(fù)位可以隨時(shí)進(jìn)行復(fù)位操作,因此響應(yīng)速度相對(duì)較快。
在SOC設(shè)計(jì)中,應(yīng)根據(jù)具體的應(yīng)用場(chǎng)景和模塊需求選擇合適的復(fù)位方式。對(duì)于時(shí)序要求較高的模塊,應(yīng)選擇同步復(fù)位;對(duì)于時(shí)序要求較低的模塊,可以選擇異步復(fù)位。同時(shí),在設(shè)計(jì)過(guò)程中還應(yīng)注意避免因復(fù)位不當(dāng)而產(chǎn)生的潛在問(wèn)題。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2552文章
51366瀏覽量
755730 -
SoC設(shè)計(jì)
+關(guān)注
關(guān)注
1文章
148瀏覽量
18799 -
同步復(fù)位
+關(guān)注
關(guān)注
0文章
27瀏覽量
10736 -
異步復(fù)位
+關(guān)注
關(guān)注
0文章
47瀏覽量
13334 -
時(shí)鐘信號(hào)
+關(guān)注
關(guān)注
4文章
451瀏覽量
28638
原文標(biāo)題:SOC設(shè)計(jì)中的同步復(fù)位和異步復(fù)位
文章出處:【微信號(hào):快樂(lè)的芯片工程師,微信公眾號(hào):快樂(lè)的芯片工程師】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
Xilinx FPGA異步復(fù)位同步釋放—同步后的復(fù)位該當(dāng)作同步復(fù)位還是異步復(fù)位?
異步復(fù)位同步撤離是什么意思?如何做到異步復(fù)位同步撤離呢?
同步復(fù)位和異步復(fù)位有什么聯(lián)系與區(qū)別,優(yōu)缺點(diǎn)!
FPGA設(shè)計(jì)中的異步復(fù)位同步釋放問(wèn)題
簡(jiǎn)談同步復(fù)位和異步復(fù)位
如何區(qū)分同步復(fù)位和異步復(fù)位?
Xilinx FPGA的同步復(fù)位和異步復(fù)位
同步復(fù)位和異步復(fù)位電路簡(jiǎn)介
詳細(xì)講解同步后的復(fù)位是同步復(fù)位還是異步復(fù)位?








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論