") FPGA同步復(fù)位和異步復(fù)位
FPGA同步復(fù)位和異步復(fù)位
FPGA(Field-Programmable Gate Array,現(xiàn)場可編程門陣列)中的復(fù)位操作是設(shè)計過程中不可或缺的一環(huán),它負(fù)責(zé)將電路恢復(fù)到初始狀態(tài),以確保系統(tǒng)的正確啟動和穩(wěn)定運行。在FPGA設(shè)計中,復(fù)位方式主要分為同步復(fù)位和異步復(fù)位兩種。以下是對這兩種復(fù)位方式的詳細(xì)探討。
一、同步復(fù)位
1. 定義與原理
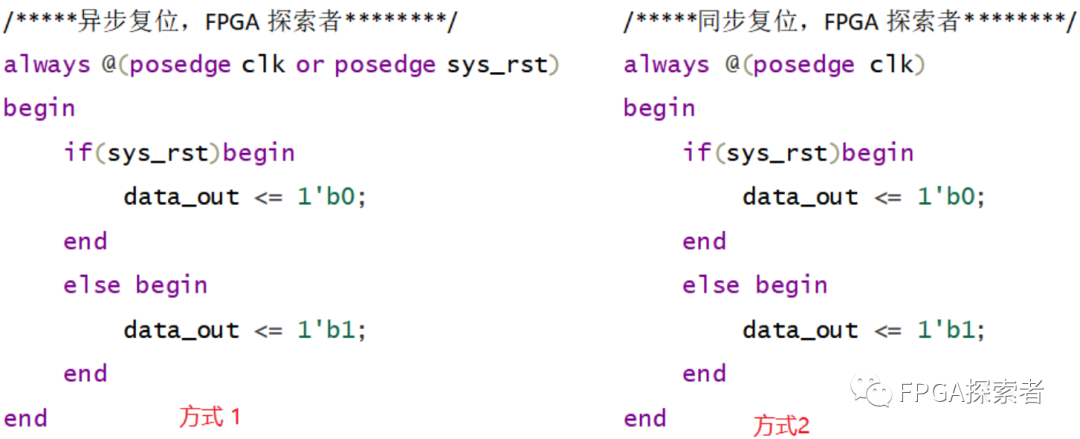
同步復(fù)位是指復(fù)位信號與主時鐘信號同步,即復(fù)位操作發(fā)生在時鐘信號的上升沿或下降沿。同步復(fù)位可以確保在時鐘邊沿處進行狀態(tài)的復(fù)位操作,從而避免了由于時序問題引起的意外錯誤。在FPGA中,通常使用一個帶有同步復(fù)位功能的寄存器來實現(xiàn)同步復(fù)位。
2. 優(yōu)點
- 電路穩(wěn)定性強 :同步復(fù)位能夠確保復(fù)位操作只發(fā)生在時鐘的有效邊沿,從而避免了復(fù)位信號與其他信號之間的時序沖突,增強了電路的穩(wěn)定性和可靠性。
- 有利于時序分析 :同步復(fù)位使系統(tǒng)成為純粹的同步時序電路,這大大有利于時序分析和約束,使得綜合出來的FPGA性能更優(yōu)。
- 可過濾毛刺 :同步復(fù)位可以過濾掉高于時鐘頻率的復(fù)位信號毛刺,確保復(fù)位操作的準(zhǔn)確性。
- 防止亞穩(wěn)態(tài) :由于復(fù)位操作只在時鐘邊沿發(fā)生,因此可以有效防止由于復(fù)位信號不滿足“Trecovery”或“Tremoval”要求而產(chǎn)生的亞穩(wěn)態(tài)問題。
3. 缺點
- 邏輯資源消耗多 :大多數(shù)FPGA的觸發(fā)器(D觸發(fā)器)只有異步復(fù)位端口,如果采用同步復(fù)位,需要額外的邏輯資源(如LUT作為反相器)來實現(xiàn)同步功能。
- 復(fù)位響應(yīng)較慢 :同步復(fù)位需要等待時鐘邊沿的到來才能執(zhí)行復(fù)位操作,因此復(fù)位響應(yīng)速度相對較慢。
- 設(shè)計復(fù)雜度增加 :同步復(fù)位的設(shè)計需要考慮時鐘偏移、組合邏輯路徑延時、復(fù)位延時等因素,增加了設(shè)計的復(fù)雜度。
4. 應(yīng)用場景
- 適用于需要高速運行的邏輯電路,如高速數(shù)據(jù)處理、高速通信等場景。
- 在對時序要求嚴(yán)格的設(shè)計中,同步復(fù)位能夠確保復(fù)位操作的精確性,避免時序沖突。
二、異步復(fù)位
1. 定義與原理
異步復(fù)位不依賴于主時鐘信號,復(fù)位信號一旦有效,即可立即觸發(fā)復(fù)位操作。異步復(fù)位通常使用專門的復(fù)位引腳或復(fù)位電路來實現(xiàn),復(fù)位信號直接連接到功能觸發(fā)器的異步復(fù)位引腳。
2. 優(yōu)點
- 復(fù)位響應(yīng)速度快 :異步復(fù)位能夠立即響應(yīng)復(fù)位信號,無需等待時鐘邊沿的到來,因此復(fù)位響應(yīng)速度非常快。
- 邏輯資源消耗少 :由于大多數(shù)FPGA的觸發(fā)器都支持異步復(fù)位端口,因此采用異步復(fù)位可以節(jié)省邏輯資源。
- 設(shè)計簡單 :異步復(fù)位的設(shè)計相對簡單,無需考慮時鐘偏移、組合邏輯路徑延時等因素。
3. 缺點
- 易受毛刺影響 :異步復(fù)位對復(fù)位信號的毛刺較為敏感,一點毛刺信號就有可能引發(fā)電路復(fù)位,造成系統(tǒng)運行錯誤。
- 可能產(chǎn)生亞穩(wěn)態(tài) :如果異步復(fù)位信號的釋放時刻與時鐘有效邊沿比較接近,可能會導(dǎo)致寄存器出現(xiàn)亞穩(wěn)態(tài)問題。
- 復(fù)位信號控制不一致 :由于異步復(fù)位信號控制的各個寄存器和復(fù)位信號源之間的數(shù)據(jù)路徑延時可能不一致,因此復(fù)位信號的釋放時刻在各個寄存器之間可能存在偏差。
4. 應(yīng)用場景
- 適用于低速運行的邏輯電路,如一些簡單的控制邏輯、狀態(tài)機等場景。
- 在需要快速響應(yīng)外部事件的場景中,如按鍵控制、觸摸屏輸入等,異步復(fù)位能夠更快地響應(yīng)這些變化。
三、異步復(fù)位-同步釋放
為了結(jié)合同步復(fù)位和異步復(fù)位的優(yōu)點,避免各自的缺點,設(shè)計中常常采用“異步復(fù)位-同步釋放”的方式。
1. 定義與原理
異步復(fù)位-同步釋放是指復(fù)位信號的到來是異步的,不依賴于時鐘信號;而復(fù)位信號的釋放則受到時鐘信號的同步控制。這種復(fù)位方式通過兩級觸發(fā)器對復(fù)位信號進行同步處理,確保復(fù)位信號在釋放時滿足時鐘的最小建立時間和最小保持時間要求,從而避免亞穩(wěn)態(tài)問題。
2. 優(yōu)點
- 結(jié)合同步和異步的優(yōu)點 :既保留了異步復(fù)位響應(yīng)速度快的優(yōu)點,又避免了同步復(fù)位可能引入的時序沖突和亞穩(wěn)態(tài)問題。
- 提高系統(tǒng)穩(wěn)定性 :通過對復(fù)位信號的同步釋放處理,有效去除了亞穩(wěn)態(tài)問題,提高了系統(tǒng)的穩(wěn)定性和可靠性。
3. 缺點
- 實現(xiàn)復(fù)雜度較高 :相對于單純的同步復(fù)位或異步復(fù)位而言,“異步復(fù)位-同步釋放”的實現(xiàn)需要額外的觸發(fā)器資源和邏輯設(shè)計。
4. 應(yīng)用場景
- 適用于對復(fù)位響應(yīng)速度和系統(tǒng)穩(wěn)定性都有較高要求的場景。
FPGA設(shè)計中的“異步復(fù)位-同步釋放”策略不僅結(jié)合了同步復(fù)位和異步復(fù)位的優(yōu)勢,還通過巧妙的邏輯設(shè)計來克服它們各自的缺點。以下是對這一策略的深入討論,包括其實現(xiàn)方式、應(yīng)用場景、設(shè)計注意事項以及與其他復(fù)位策略的比較。
四、實現(xiàn)方式
1. 基本結(jié)構(gòu)
“異步復(fù)位-同步釋放”通常通過兩級觸發(fā)器(Flip-Flop, FF)來實現(xiàn)。第一級觸發(fā)器負(fù)責(zé)接收異步復(fù)位信號,并將其同步到內(nèi)部邏輯中。第二級觸發(fā)器則接收第一級觸發(fā)器的輸出作為輸入,并在時鐘信號的驅(qū)動下實現(xiàn)同步釋放。這種結(jié)構(gòu)確保了復(fù)位信號的釋放是與時鐘信號同步的,從而避免了亞穩(wěn)態(tài)問題。
2. 復(fù)位信號去抖動
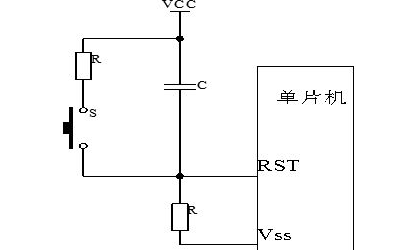
由于異步復(fù)位信號可能受到外部噪聲或電路內(nèi)部毛刺的影響,因此在進入FPGA之前通常需要進行去抖動處理。去抖動可以通過硬件電路(如RC濾波器)或軟件算法(在FPGA內(nèi)部實現(xiàn))來實現(xiàn)。硬件去抖動通常更簡單可靠,但可能需要額外的硬件資源;軟件去抖動則更靈活,但可能增加設(shè)計的復(fù)雜性和功耗。
3. 同步釋放邏輯
同步釋放邏輯是“異步復(fù)位-同步釋放”策略的核心。它通常包括一個或多個觸發(fā)器,這些觸發(fā)器在時鐘信號的驅(qū)動下將復(fù)位信號從異步狀態(tài)轉(zhuǎn)換為同步狀態(tài)。在復(fù)位信號釋放時,這些觸發(fā)器會確保復(fù)位信號滿足時鐘信號的建立時間和保持時間要求,從而避免亞穩(wěn)態(tài)問題。
五、應(yīng)用場景
1. 高可靠性系統(tǒng)
在需要高可靠性的系統(tǒng)中,“異步復(fù)位-同步釋放”策略尤為重要。這些系統(tǒng)通常對復(fù)位操作的準(zhǔn)確性和可靠性有嚴(yán)格要求,例如航空航天、醫(yī)療設(shè)備等領(lǐng)域。通過采用這種復(fù)位策略,可以確保系統(tǒng)在復(fù)位過程中不會出現(xiàn)意外錯誤或故障。
2. 復(fù)雜邏輯設(shè)計
在復(fù)雜的FPGA邏輯設(shè)計中,由于存在大量的時序約束和信號交互,“異步復(fù)位-同步釋放”策略可以簡化設(shè)計過程并提高設(shè)計效率。通過減少時序沖突和亞穩(wěn)態(tài)問題,這種復(fù)位策略可以幫助設(shè)計師更專注于邏輯功能的實現(xiàn)和優(yōu)化。
3. 高性能系統(tǒng)
在需要高性能的系統(tǒng)中,如高速數(shù)據(jù)處理、實時通信等領(lǐng)域,“異步復(fù)位-同步釋放”策略可以確保系統(tǒng)能夠快速響應(yīng)外部事件并恢復(fù)到穩(wěn)定狀態(tài)。這種復(fù)位策略的快速響應(yīng)特性使得系統(tǒng)能夠在短時間內(nèi)恢復(fù)到正常工作狀態(tài),從而提高系統(tǒng)的整體性能。
六、設(shè)計注意事項
1. 時鐘穩(wěn)定性
由于“異步復(fù)位-同步釋放”策略依賴于時鐘信號的穩(wěn)定性來確保復(fù)位操作的同步性,因此時鐘信號的穩(wěn)定性是設(shè)計過程中需要特別關(guān)注的一個方面。時鐘信號的抖動、偏移和相位差都可能影響復(fù)位操作的準(zhǔn)確性和可靠性。
2. 復(fù)位信號去抖動
如前所述,復(fù)位信號的去抖動是確保復(fù)位操作準(zhǔn)確性的重要步驟。在設(shè)計過程中需要根據(jù)實際情況選擇合適的去抖動方法,并確保去抖動電路或算法能夠有效地過濾掉噪聲和毛刺信號。
3. 復(fù)位優(yōu)先級
在具有多個復(fù)位源的系統(tǒng)中,需要明確各個復(fù)位源的優(yōu)先級和時序關(guān)系。這有助于確保在多個復(fù)位信號同時有效時系統(tǒng)能夠按照預(yù)定的順序進行復(fù)位操作。
4. 復(fù)位邏輯簡化
雖然“異步復(fù)位-同步釋放”策略可以提高系統(tǒng)的穩(wěn)定性和可靠性,但它也可能增加設(shè)計的復(fù)雜性和功耗。因此,在設(shè)計過程中需要盡量簡化復(fù)位邏輯,減少不必要的觸發(fā)器和組合邏輯路徑,以降低功耗并提高設(shè)計效率。
七、與其他復(fù)位策略的比較
1. 與純同步復(fù)位的比較
純同步復(fù)位雖然可以確保復(fù)位操作的同步性并減少時序沖突和亞穩(wěn)態(tài)問題,但其復(fù)位響應(yīng)速度相對較慢且需要額外的邏輯資源來實現(xiàn)同步功能。相比之下,“異步復(fù)位-同步釋放”策略在保留同步復(fù)位優(yōu)點的同時提高了復(fù)位響應(yīng)速度并減少了邏輯資源消耗。
2. 與純異步復(fù)位的比較
純異步復(fù)位雖然具有快速響應(yīng)的優(yōu)點但其對復(fù)位信號的毛刺和噪聲較為敏感且可能產(chǎn)生亞穩(wěn)態(tài)問題。“異步復(fù)位-同步釋放”策略通過同步釋放邏輯來克服這些缺點提高了系統(tǒng)的穩(wěn)定性和可靠性。
3. 與其他高級復(fù)位策略的比較
除了“異步復(fù)位-同步釋放”策略外還有其他一些高級復(fù)位策略如可配置復(fù)位、多層次復(fù)位等。這些策略通常具有更復(fù)雜的結(jié)構(gòu)和更多的功能選項以適應(yīng)不同的應(yīng)用場景和設(shè)計需求。然而它們也可能增加設(shè)計的復(fù)雜性和功耗。相比之下“異步復(fù)位-同步釋放”策略在保持相對簡單結(jié)構(gòu)的同時提供了良好的復(fù)位性能和可靠性。
八、結(jié)論
“異步復(fù)位-同步釋放”策略是FPGA設(shè)計中一種常用的復(fù)位方式。它通過結(jié)合異步復(fù)位的快速響應(yīng)特性和同步復(fù)位的同步性優(yōu)點來克服各自的缺點。在設(shè)計過程中需要注意時鐘穩(wěn)定性、復(fù)位信號去抖動、復(fù)位優(yōu)先級以及復(fù)位邏輯的簡化等方面的問題。此外,將“異步復(fù)位-同步釋放”策略與其他復(fù)位策略進行比較,有助于更好地理解其在實際應(yīng)用中的優(yōu)勢和局限性。以下是對該策略的進一步探討,包括其在實際項目中的應(yīng)用實例、設(shè)計優(yōu)化方法以及對未來發(fā)展趨勢的展望。
九、實際項目中的應(yīng)用實例
1. 高速通信接口設(shè)計
在高速通信接口(如以太網(wǎng)、串行通信接口等)的設(shè)計中,對復(fù)位操作的準(zhǔn)確性和響應(yīng)速度有著極高的要求。由于通信協(xié)議通常規(guī)定了嚴(yán)格的時序要求和錯誤處理機制,因此任何復(fù)位操作的延遲或錯誤都可能導(dǎo)致通信失敗或數(shù)據(jù)丟失。采用“異步復(fù)位-同步釋放”策略可以確保在接收到復(fù)位信號時能夠迅速響應(yīng),并通過同步釋放邏輯來避免亞穩(wěn)態(tài)問題,從而保證通信接口的穩(wěn)定性和可靠性。
2. 復(fù)雜控制系統(tǒng)設(shè)計
在復(fù)雜控制系統(tǒng)(如工業(yè)自動化、航空航天控制系統(tǒng)等)中,系統(tǒng)通常包含多個相互關(guān)聯(lián)的子系統(tǒng)和控制回路。這些子系統(tǒng)可能具有不同的復(fù)位需求和優(yōu)先級,且對復(fù)位操作的響應(yīng)速度也有不同的要求。通過采用“異步復(fù)位-同步釋放”策略,并結(jié)合可配置復(fù)位和優(yōu)先級控制機制,可以實現(xiàn)對不同子系統(tǒng)和控制回路的靈活復(fù)位控制,從而提高整個控制系統(tǒng)的穩(wěn)定性和可靠性。
十、設(shè)計優(yōu)化方法
1. 優(yōu)化復(fù)位信號路徑
為了減少復(fù)位信號在FPGA內(nèi)部的傳播延遲和噪聲干擾,可以優(yōu)化復(fù)位信號路徑的設(shè)計。例如,采用低阻抗的布線策略、減少不必要的信號分支和緩沖器、使用高質(zhì)量的復(fù)位源等。此外,還可以考慮在FPGA外部添加復(fù)位去抖動電路或濾波器來進一步提高復(fù)位信號的穩(wěn)定性和可靠性。
2. 簡化復(fù)位邏輯
為了降低功耗和提高設(shè)計效率,可以盡量簡化復(fù)位邏輯的設(shè)計。例如,通過合并具有相同復(fù)位需求的觸發(fā)器和邏輯塊、減少不必要的同步釋放邏輯、使用更高效的復(fù)位控制策略等。此外,還可以利用FPGA的內(nèi)置資源(如復(fù)位樹、復(fù)位同步器等)來簡化復(fù)位邏輯的實現(xiàn)。
3. 引入可測試性設(shè)計(DFT)
在FPGA設(shè)計中引入可測試性設(shè)計(DFT)技術(shù)可以幫助設(shè)計師更好地驗證和優(yōu)化復(fù)位邏輯。通過插入掃描鏈、測試點、故障注入點等DFT元素,可以在不影響系統(tǒng)正常功能的情況下對復(fù)位邏輯進行詳細(xì)的測試和故障排查。這有助于及時發(fā)現(xiàn)并修復(fù)復(fù)位邏輯中的潛在問題,提高系統(tǒng)的穩(wěn)定性和可靠性。
十一、未來發(fā)展趨勢
1. 更高集成度的FPGA
隨著半導(dǎo)體工藝技術(shù)的不斷進步和FPGA設(shè)計工具的不斷完善,未來FPGA的集成度將進一步提高。這將使得FPGA能夠容納更多的邏輯資源和功能模塊,從而支持更復(fù)雜、更高性能的系統(tǒng)設(shè)計。在這種趨勢下,“異步復(fù)位-同步釋放”策略將需要適應(yīng)更高密度的邏輯環(huán)境和更復(fù)雜的時序要求,以保持其復(fù)位性能和可靠性優(yōu)勢。
2. 智能化復(fù)位控制
隨著人工智能和機器學(xué)習(xí)技術(shù)的不斷發(fā)展,未來FPGA的復(fù)位控制將變得更加智能化和自適應(yīng)。例如,通過引入智能算法來預(yù)測和識別潛在的復(fù)位需求、優(yōu)化復(fù)位策略和優(yōu)先級設(shè)置、自動調(diào)整復(fù)位參數(shù)等。這將使得FPGA系統(tǒng)能夠更加靈活地應(yīng)對各種復(fù)雜多變的運行環(huán)境和工作條件,提高系統(tǒng)的整體性能和可靠性。
3. 低功耗設(shè)計趨勢
隨著移動設(shè)備和物聯(lián)網(wǎng)應(yīng)用的興起,低功耗設(shè)計已經(jīng)成為FPGA設(shè)計的重要趨勢之一。在“異步復(fù)位-同步釋放”策略中,通過優(yōu)化復(fù)位邏輯的設(shè)計、減少不必要的同步釋放邏輯、采用低功耗的復(fù)位源和布線策略等方法來降低功耗將變得更加重要。此外,還可以考慮將復(fù)位邏輯與系統(tǒng)的其他低功耗設(shè)計策略相結(jié)合(如時鐘門控、電源門控等),以進一步提高系統(tǒng)的能效比。
十二、結(jié)論與展望
“異步復(fù)位-同步釋放”策略作為FPGA設(shè)計中一種常用的復(fù)位方式,具有快速響應(yīng)、高穩(wěn)定性和可靠性的優(yōu)點。通過結(jié)合異步復(fù)位的快速響應(yīng)特性和同步復(fù)位的同步性優(yōu)點,該策略能夠克服各自的缺點并適應(yīng)不同的應(yīng)用場景和設(shè)計需求。在實際項目中,通過優(yōu)化復(fù)位信號路徑、簡化復(fù)位邏輯和引入DFT技術(shù)等方法可以進一步提高該策略的復(fù)位性能和可靠性。同時隨著半導(dǎo)體工藝技術(shù)的不斷進步和FPGA設(shè)計工具的不斷完善以及智能化復(fù)位控制和低功耗設(shè)計趨勢的發(fā)展,“異步復(fù)位-同步釋放”策略將在未來FPGA設(shè)計中發(fā)揮更加重要的作用。
未來展望方面,“異步復(fù)位-同步釋放”策略需要不斷適應(yīng)新技術(shù)和新應(yīng)用的發(fā)展需求。例如隨著5G、物聯(lián)網(wǎng)等新興技術(shù)的興起以及FPGA在云計算、大數(shù)據(jù)等領(lǐng)域的應(yīng)用拓展,“異步復(fù)位-同步釋放”策略將需要支持更高的數(shù)據(jù)傳輸速率和更低的延遲要求。此外隨著FPGA設(shè)計工具的不斷完善以及智能化設(shè)計方法的普及,“異步復(fù)位-同步釋放”策略的實現(xiàn)和優(yōu)化也將變得更加高效和便捷。因此我們有理由相信在未來的FPGA設(shè)計中“異步復(fù)位-同步釋放”策略將繼續(xù)發(fā)揮其重要作用并推動FPGA技術(shù)的不斷發(fā)展和進步。
-
FPGA
+關(guān)注
關(guān)注
1630文章
21794瀏覽量
605129 -
同步復(fù)位
+關(guān)注
關(guān)注
0文章
27瀏覽量
10736 -
異步復(fù)位
+關(guān)注
關(guān)注
0文章
47瀏覽量
13334
發(fā)布評論請先 登錄
相關(guān)推薦
Xilinx FPGA異步復(fù)位同步釋放—同步后的復(fù)位該當(dāng)作同步復(fù)位還是異步復(fù)位?
異步復(fù)位同步釋放有多個時鐘域時如何處理 異步復(fù)位同步釋放的策略

FPGA同步復(fù)位和異步復(fù)位的可靠性特點及優(yōu)缺點
同步復(fù)位和異步復(fù)位有什么聯(lián)系與區(qū)別,優(yōu)缺點!
如何區(qū)分同步復(fù)位和異步復(fù)位?
Xilinx FPGA的同步復(fù)位和異步復(fù)位
同步復(fù)位和異步復(fù)位電路簡介
詳細(xì)講解同步后的復(fù)位是同步復(fù)位還是異步復(fù)位?


同步復(fù)位與異步復(fù)位的區(qū)別

FPGA學(xué)習(xí)-異步復(fù)位,同步釋放






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論