 “萬物”皆可盤?機械手竟然也學會了!
“萬物”皆可盤?機械手竟然也學會了!
此前,特斯拉宣布研究制作專業級別的人形機器人,這一舉動引起了廣泛關注,讓人形機器人賽道熱度暴漲。國內外眾多企業也紛紛跟進,接連推出自己的人形機器人產品。
然而,當前市場上很多的人形機器人的手部設計和功能都存在一定的缺陷。
比如,小米推出的“鐵大”人形機器人,其手部像帶了一幅鯊魚手套,完全沒有手指設計,只能進行開合夾取動作。
與之類似,傅利葉智能近日發布的GR-1通用人形機器人手部也是兩片式夾爪式設計。
即便是很早就開始人形機器人研究的波士頓動力,其Atlas的手部設計也是直接用一個與肘部相似的黑色半球狀連接,后面雖然進行了改進但也僅僅是換了一個夾爪。
特斯拉的人形機器人“擎天柱”雖然對此進行了更為精細化的改進,能完成一些相對更為精細的操作,但在敏捷性方面仍然有待進步。
近日,由香港科技大學和加州大學圣地亞哥分校的幾位學者(陳啟峰1 , 尹兆恒1+ , 王小龍2, 秦宇哲2 , 黃丙浩2+ , )聯合發表在《arxiv》上的研究成果或許能為人形機器人手部靈活性的提升帶來一些幫助。
據悉,陳啟峰團隊推出了一種新系統Touch Dexterity,可以僅通過觸覺來執行手中的對象旋轉,且不受視覺傳感限制,為多指機器人提供更加靈敏的觸覺感知。
▍人手?機械手?靈活性主要依靠啥?
通過上面的視頻,我們可以看到多指機械手不僅能夠圍繞不同軸旋轉現實世界的物體,還能在黑暗環境中進行手動操作。
這其中的關鍵便在于陳啟峰團隊推出的新觸覺感知系統Touch Dexterity。
盲人摸象的故事想必大家都聽過,觸覺信息雖不能反映全部情況,但它揭示了可能無法直接從視覺推斷出的有用聯系信息,在人類的靈活性中起著至關重要的作用。
人類可以在不使用視覺的情況下進行手動靈巧操作,那么機械手是否能具有同樣的能力?在此動機的推動下,陳啟峰團隊首先對觸摸信息的幫助進行了深度了解。
為了了解觸摸信息有何幫助,陳啟峰團隊從形狀理解的角度進行了一項研究。在訓練神經網絡通過旋轉卷展來預測對象的形狀后,團隊使用它通過旋轉卷展來預測新物體的形狀。
團隊進而發現,只有觸摸信息出現在卷展欄中,才能準確地重建對象的形狀。
因此團隊決定嘗試賦予機械手觸摸能力以實現機械手的敏捷靈活性。
▍靈巧操縱系統Touch Dexterity
在經過多次試驗后,陳啟峰團隊推出了觸覺感知系統Touch Dexterity,實現了多指機械手僅適用觸摸即可進行手動旋轉,即便在系統看不見的情況下,多指機械手也依然能夠圍繞不同的軸旋轉各種現實世界的物體。
據了解,觸覺感知系統Touch Dexterity由Allegro 機械手和 16 個低成本力敏電阻 (FSR) 傳感器的硬件組成。觸摸感應陣列可以提供關鍵手部物體接觸的反饋,并幫助手理解形狀,確保復雜的手部物體操作的成功。
具體來看,陳啟峰團隊棄用了傳統依賴小區域內的精確觸覺傳感的設計,提出了一種新的靈巧操縱系統設計——使用覆蓋整個機器人手(手掌、手指鏈接、指尖)一側的密集二元力傳感器(觸摸或無觸摸)。
這不僅設計成本低廉,可以提供更大的對象覆蓋范圍,同時最小化 Sim2Real 間隙。
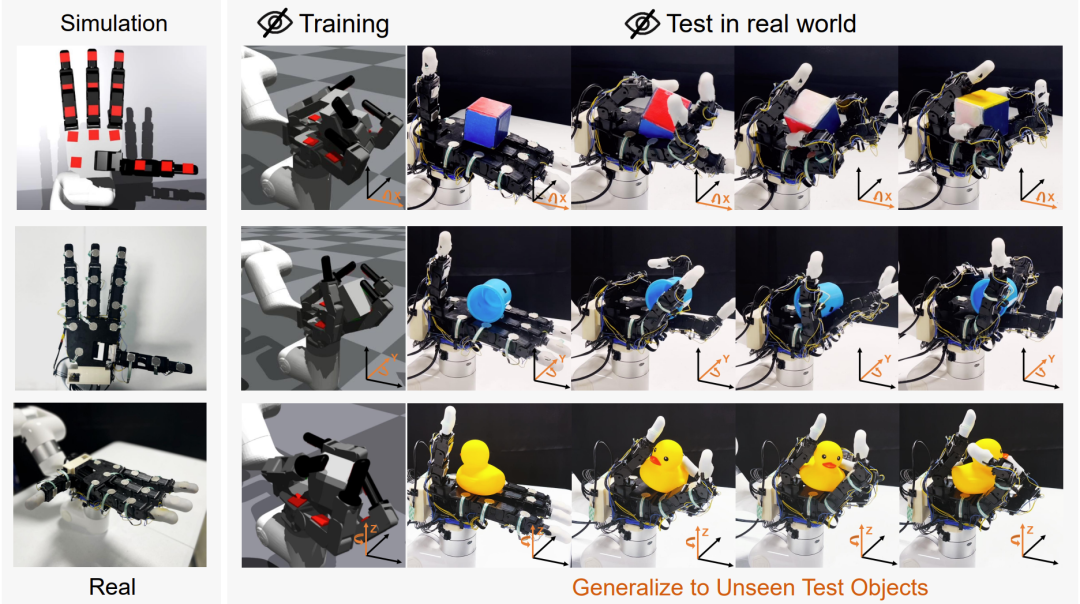
在學習流程方面,陳啟峰團隊通過強化學習訓練控制策略來旋轉模擬中的多個對象。多指機械手學習到的策略可以直接轉移到現實中并泛化到看不見的新物體。
由于系統不依賴于視覺,這為靈巧操縱系統在難以獲得可靠視覺輸入的復雜現實場景中的應用提供了巨大優勢。
值得一提的是,結合各種學習的對象旋轉原語,Touch Dexterity還提供了方便人類共享的控制界面,擦左元可以使用鍵盤控制系統重新定向對象。
▍結語
Touch Dexterity系統對于機械手敏捷靈活性的提升效果顯而易見,特斯拉擎天柱手部做了11個精細的自由度的設計顯然是想要充分發揮人形機器人手部的作用。可以讓擎天柱在黑燈工廠中摸黑干活的Touch Dexterity,馬斯克看了都要心動吧!
-
機器人
+關注
關注
211文章
28618瀏覽量
207912 -
機械手
+關注
關注
7文章
339瀏覽量
29711 -
感知系統
+關注
關注
1文章
72瀏覽量
15976
原文標題:“萬物”皆可盤?機械手竟然也學會了!
文章出處:【微信號:指南車機器人科技,微信公眾號:指南車機器人科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
案例分析,搬運機械手如何選擇電機?


機械手末端快換技術:工業自動化的強大新動力
機械手 OEM 的應用
明治案例 | 【BGS背景抑制】【大光斑】機械手吸取網布有無檢測

“快、準、穩”——阿普奇AK5在機械手領域的應用解決方案

機器視覺控制機械手的具體過程

PLC在機械手控制系統中的具體應用

工業網關的數字化車間機械手和工業生產設備遠程監控解決方案應用

ZR機械手:提高生產效率,降低成本的有效途徑-速程精密

ZR機械手:推動制造業向更高水平發展

搬運機械手連接“搭子”哪家選?YM系列工業級連接器真搭






 工商網監
工商網監
評論