") 虹科新品|VisualSim——一款完整的電子系統(tǒng)級建模、架構設計與性能分析工具
虹科新品|VisualSim——一款完整的電子系統(tǒng)級建模、架構設計與性能分析工具

虹科-VisualSim
新品發(fā)布
VisualSim概述
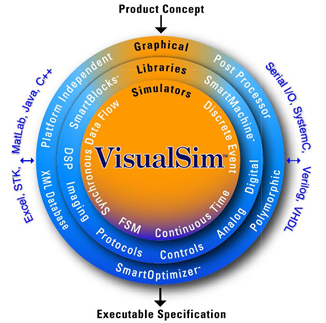
VisualSim是一款完整的電子系統(tǒng)級建模、架構設計與性能分析工具,一個用于系統(tǒng)規(guī)約設計、分析與驗證的系統(tǒng)工程學解決方案。VisualSim使用圖形化環(huán)境來構建諸如分布式、網(wǎng)絡化處理系統(tǒng),或 SoC/FPGA 這樣的高性能半導體產(chǎn)品的事務級模型。 借助 VisualSim的快速虛擬原型開發(fā)技術,設計團隊在項目開發(fā)的前期階段即可對一個電子系統(tǒng)的不同硬件、軟件實現(xiàn)方案進行快速的性能分析與研究評價,驗證和優(yōu)化系統(tǒng)設計構想,得到能夠滿足全部約束條件的最優(yōu)系統(tǒng)實現(xiàn)方案。
聚焦汽車應用領域,早期的汽車系統(tǒng)探索、功率探索和性能建模能夠理解操作并消除風險,從而提高可擴展性。VisualSim在汽車OEM和一級供應商的應用場景,重點在汽車電子、網(wǎng)絡和軟件調(diào)度方面,應用包括以下:
汽車網(wǎng)絡規(guī)劃
汽車網(wǎng)絡架構原型開發(fā)(支持車載以太網(wǎng)、時間敏感網(wǎng)絡TSN、CAN/CANFD、LIN、Flexray總線):
ECU硬件架構
-
探索不同的CPU策略,ECU接收和發(fā)送的緩沖區(qū)使用率;
-
汽車ECU的架構探索、性能分析、節(jié)點到節(jié)點的距離、功率測量和動態(tài)功率分析。
-
汽車制動系統(tǒng)仿真,確定ECU硬件、權衡導線長度和功耗;
軟件服務的質量檢測
-
在ECU和傳感器的網(wǎng)絡中的AUTOSAR性能;
-
基于AUTOSAR的系統(tǒng)任務調(diào)度;
功能安全Functional safety
-
ISO-26262和ASIL符合性檢查(其中ISO-26262功能安全——硬件、軟件、網(wǎng)絡、操作系統(tǒng)、電源和ASIL認證);
-
主動故障注入的情況分析;
-
系統(tǒng)瓶頸和死鎖;
-
SOTIF (ISO 21448)支持自動駕駛;
<< ?VisualSim在汽車領域的應用 >>
VisualSimArchitect

VisualSim Architect 是 Mirabilis Design 的旗艦產(chǎn)品,該平臺應用于探索仿真各種系統(tǒng)的結構--半導體、軟件架構、汽車網(wǎng)絡模擬、汽車關鍵功能模擬,成像、信號處理、控制系統(tǒng)和網(wǎng)絡等等。
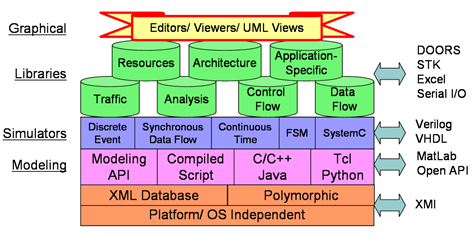
VisualSim Architect是一個用于層次化系統(tǒng)建模、交互式仿真執(zhí)行和分析的圖形化工具環(huán)境。采用一個圖形化和層次化的建模環(huán)境,具有開放的DTD XML數(shù)據(jù)庫,多域仿真和第三方工具、語言和模擬器的接口。
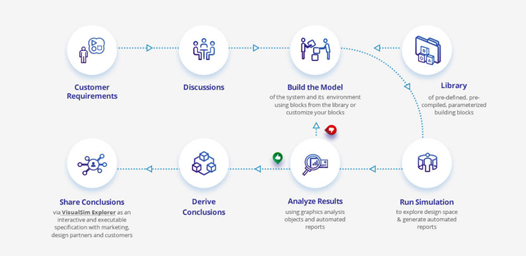
VisualSim Architect帶有大量的建模組件、技術IP塊和工具,以開發(fā)完整的自定義組件/子系統(tǒng)。使用建模庫可以快速構建模型,用適當?shù)挠嬎隳P瓦M行仿真,并利用生成的報告進行分析。
為了支持準確的建模,框圖編輯器具有錯誤檢測和報告、語法檢查器、圖形調(diào)試器、跟蹤和記錄功能。創(chuàng)新的庫管理能夠在世界各地的建模平臺上共享子系統(tǒng),并集成到版本控制軟件中。借助VisualSim的模型組件庫和用戶定制模型,用戶可以在短時間內(nèi)構造復雜的系統(tǒng)模型。
VisualSimArchitect關鍵特性
1.圖形化開發(fā)
由四個模型構建選項組成,為實現(xiàn)首選方法提供了靈活性:
-
方框圖
-
有限狀態(tài)機
-
腳本編輯器
-
編程功能
2.多域融合
計算模型:離散事件、同步數(shù)據(jù)流、連續(xù)時間、有限狀態(tài)機和SystemC。
3.模型庫
大量基本化建模組件庫,包括流量生成器、文件讀寫器、變量和參數(shù)管理、數(shù)學運算符、算法、繪圖儀、顯示和隊列。
4.分層模型
類和動態(tài)實例化-塊狀圖、代碼、腳本和FSM可以作為獨立的塊來構建并分層組裝。對獨立塊的改變將立即更新引用它們的任何模型。
5.XML數(shù)據(jù)庫
使用一個開放的DTD(Document TypeDefinition,文檔類型定義),可以很容易地從其他工具中導入/導出,如使用一個自定義腳本的SysML。文件的尺寸很小,因為它們引用了其他的XML文件,并且是可使用的。在這個模型文件中只記錄了針對這個實例的變化。
6.調(diào)試平臺
圖形化調(diào)試,包括模型執(zhí)行的動畫、監(jiān)聽器、緩沖區(qū)使用和利用率的可視化報告、斷點、檢查點以存儲中間模型狀態(tài)。
7.報告生成器
提供500多份用戶配置報告,包括延遲、吞吐量、利用率、緩沖區(qū)占用率、退出/進入次數(shù)、消耗的功率、峰值功率、功率/設備、功率/任務、累積功率、命中率、停滯時間和服務質量。
8.運行模擬器
使用命令行腳本運行Monte-Carlo模擬的許可。這在同時運行大量的參數(shù)掃描時非常有用,分布在多個核心和服務器群上。
9.工業(yè)級技術IP
硬件組件的標準庫,如處理器、存儲器、緩存、總線、接口、DMA、網(wǎng)絡、軟件任務和RTOS。這些技術IP與VisualSim Architect框圖編輯器集成。技術IP是模型能夠如此快速構建的主要原因。
10.接口類型
被集成到VisualSim仿真器的內(nèi)核,支持的接口:包括trace記錄文件、文本文件導入和導出、與硬件,儀器和FPGA板對接的數(shù)據(jù)包接口、SystemC、MatLab/Simulink、C/C++/Java/Python代碼和其他XML接口。
11.基礎設備需求
允許模型可以分布在整個網(wǎng)絡中,VisualSim是獨立于平臺的,需要不到1GB的磁盤空間,大約2GB的內(nèi)存,一個大規(guī)模的模型大約是3MB大小。
12.模型大小和模擬器速度
仿真器的速度--VisualSim能夠構建300個層次的模型,仿真器的速度是業(yè)內(nèi)最快的。
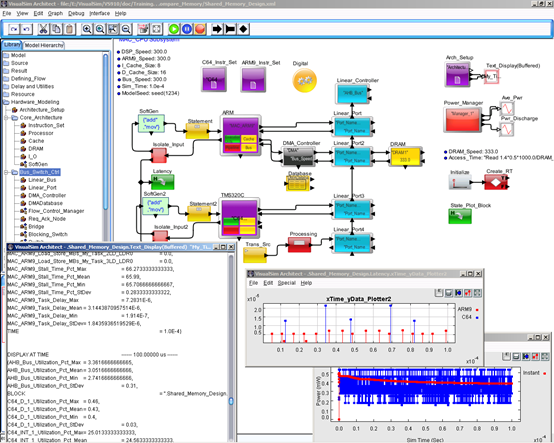
VisualSimArchitect軟件一覽
-
汽車電子
+關注
關注
3028文章
8021瀏覽量
167613
發(fā)布評論請先 登錄
相關推薦
羅徹斯特電子的商用航空電子助力經(jīng)驗證的航空電子系統(tǒng)

集成電路電磁兼容性及應對措施相關分析(一) 電子系統(tǒng)性能要求與ESD問題

集成電路電磁兼容性及應對措施相關分析(一) — 電子系統(tǒng)性能要求與ESD問題
Celsius EC Solver:對電子系統(tǒng)散熱性能進行準確快速分析
虛擬設計與優(yōu)化電力電子系統(tǒng)依賴于半導體芯片模型

FPGA仿真黑科技\"EasyGo Vs Addon \",助力大規(guī)模電力電子系統(tǒng)仿真
西門子EDA發(fā)布下一代電子系統(tǒng)設計平臺
Xpedition Schematic Analysis原理圖完整性分析工具簡介
使用泰克示波器精確診斷并優(yōu)化汽車電子系統(tǒng)

24芯M16插座在汽車電子系統(tǒng)中的關鍵作用


【技術分享】揭秘電壓基準源:如何選擇才能確保電子系統(tǒng)穩(wěn)定如初?#電壓基準源 #電子系統(tǒng)
顯示電子系統(tǒng)中信號波形通信協(xié)議原理
DesignCon2024 | 芯和半導體發(fā)布針對下一代電子系統(tǒng)的“SI/PI/多物理場分析”EDA解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論