 混合信號控制電路使用微控制器,靈活地實現PID算法
混合信號控制電路使用微控制器,靈活地實現PID算法
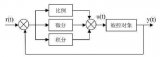
當過程被控制時(圖1),將過程的特性,如溫度(調節變量)與所需值或設定值進行比較。差值或錯誤信號e(t)應用于控制器,控制器使用錯誤信號產生控制信號u(t),該控制信號操縱過程的物理輸入(操縱變量),導致調節變量發生變化,從而穩定地減少誤差。
常用的控制算子是比例-積分-微分(P-I-D 或 PID)控制器。它總結了從誤差得出的三個項:簡單增益或比例項;與誤差的積分成比例的項,或積分項;以及與誤差信號變化率成比例的項,或導數項。在閉環中,比例項旨在減少與其瞬時值成比例的誤差;積分項——累積誤差——慢慢地將誤差推向零(其存儲的誤差往往會使誤差超過零);導數項使用誤差變化率來預測其未來值,加快對比例項的響應,并通過補償積分項的滯后來提高循環穩定性。
這些術語的組合可以提供非常準確和穩定的控制。但控制項必須單獨調整或“調整”,以便在特定系統中獲得最佳性能。由于具有許多滯后或明顯延遲響應的過程難以控制,因此簡單的PID控制器最適合用于對操縱變量(通常控制添加到過程的能量量或流速)的變化做出反應的過程。PID控制在負載不斷變化且控制器需要自動響應設定值的頻繁變化或調節變量的偏差(由于環境條件和負載的變化)的系統中非常有用。
圖1.采用PID控制功能的控制回路。
用于慢速過程的PID控制器的參數通常最初是通過使用按速度放大的系統模型獲得的。有許多先進的控制策略,但絕大多數工業控制系統使用PID控制器,因為它們是標準的,經過時間考驗的,易于理解的工業組件。此外,由于過程的不確定性,對于給定過程,更復雜的控制方案不一定比經過良好調諧的PID控制器更有效。
PID術語已在上文中簡要解釋。這是對它們的更完整的解釋。
比例控制
比例控制應用與誤差成比例的糾正項。比例常數 (KP) 稱為控制器的比例增益。隨著增益的增加,系統對設定值變化的響應速度更快,最終(穩態)誤差更小,但系統變得不那么穩定,因為它的阻尼越來越不足。增益的進一步增加將導致過沖、振鈴,并最終導致無阻尼振蕩。
整體控制
雖然比例控制可以大大減少誤差,但它本身不能將誤差減少到零。但是,通過在控制函數中添加積分項,可以將誤差減少到零。閉環中的積分器必須設法將其平均輸入保持在零(否則,其輸出將無限增加,最終達到飽和或更糟)。積分增益常數越高,K我,錯誤越早變為零(甚至更高)以響應更改;所以要設置K我太高會招致振蕩和不穩定。
衍生控制
添加與誤差信號的時間導數或變化率成比例的微分項可以提高穩定性,減少在高增益下使用比例和/或積分項時產生的過沖,并通過預測誤差的變化來提高響應速度。它的增益,或“阻尼常數”,KD,通常可以進行調整,以實現對設定值或調節變量變化的臨界阻尼響應。阻尼太小,比例控制的過沖可能會殘留;過多的阻尼可能會導致不必要的響應緩慢。設計人員還應注意,微分器會放大誤差信號中出現的高頻噪聲。
總之,比例控制器(P)將減少上升時間,并將減少但永遠不會消除穩態誤差。比例積分(PI)控制器將消除穩態誤差,但可能會使瞬態響應惡化。比例積分微分控制器(PID)將提高系統穩定性,減少過沖并改善瞬態響應。表I總結了在閉環系統中增加給定項的影響。
表一.
|
增益 常數 |
上升 時間 |
過頭 |
建立 時間 |
穩態 錯誤 |
| KP | 減少 | 增加 | 變化不大 | 減少 |
| K我 | 減少 | 增加 | 增加 | 消除 |
| KD | 變化不大 | 減少 | 減少 | 變化不大 |
三項之和為
在圖1的系統中,設定值與實際輸出之間的差異由誤差信號e(t)表示。誤差信號被施加到PID控制器,PID控制器計算該誤差信號的導數和積分,應用三個系數,并執行上述求和以形成信號u(t)。
數字PID控制
PID算法現已廣泛用于工業過程控制,已被認可并應用了近一個世紀,最初用于氣動控制器。在 1940 年代和 50 年代,電子設備首次用于使用模擬計算機對控制系統設計中的 PID 控制進行建模,越來越多地參與實際的過程控制回路,首先作為模擬控制器,后來作為數字控制器。使用8位微控制器的PID算法的軟件實現是有據可查的。
在本文中,我們將展示數字PID控制器的基本組件,然后展示如何使用MicroConverter(片上數據采集系統)經濟地實現過程控制。?
例如,可以考慮在空調或制冷系統中使用PID回路,使用連續監測和控制(與恒溫開關控制相反)將溫度精確地保持在狹窄范圍內。圖2顯示了控制系統的基本框圖,該系統通過連續調節風扇速度,增加或減少來自低溫源的氣流來調節溫度。
圖2.使用分立元件的溫控通風系統的PID控制器示例。
系統需要保持室溫盡可能接近用戶選擇的(設定值)值。為此,系統必須準確測量室溫并調整風扇速度以進行補償。
在圖2所示的系統中,精密電流源驅動電流通過電阻溫度傳感器(熱敏電阻或RTD)與基準電阻串聯,并進行調整以表示所需溫度。模數轉換器(ADC)將基準電壓和熱敏電阻電壓之間的差異數字化,作為溫度誤差的量度。8位微控制器用于處理ADC結果,并實現PID控制器。微控制器調節風扇速度,通過數模轉換器(DAC)驅動風扇速度。需要外部程序存儲器和RAM來操作8位微控制器并執行程序。
如果單獨使用比例控制(P),則風扇的運行速率將與設定點的溫差直接相關。如前所述,這將留下穩定狀態錯誤。
添加積分項 (PI) 會導致風扇速度隨環境溫度上升或下降。它調整室溫以補償由于白天環境溫度升高和晚上溫度下降而導致的誤差。因此,積分項消除了偏移,但如果積分增益過高,則可以引入圍繞設定點的振蕩。(請注意,振蕩是采用開關恒溫器的溫度控制系統所固有的。
通過添加導數項(PID),可以大大降低這種振蕩趨勢。導數項響應設定值誤差的變化率。它可以幫助系統快速糾正由于門或窗瞬間打開而導致的突然變化。
為了簡化該系統,最大限度地降低器件成本、裝配成本和電路板面積,可以使用集成式片上系統(SOC)解決方案,如圖3所示。
圖3.片上系統實現。
ADuC845微轉換器包括62K字節的閃存/EE程序存儲器、4K字節的閃存數據存儲器和2K字節的RAM。閃存數據存儲器可用于存儲“調諧”PID環路的系數,而單周期內核提供足夠的處理能力來同時實現PID環路并執行一般任務。
根據所選的微轉換器,ADC的分辨率范圍為12至24位。在需要將溫度保持在0.1°C精度的系統中,ADuC845的高性能24位Σ-Δ型ADC是理想的選擇。
PID控制回路有用的第二種應用類型是設定點(伺服)電機控制。在此應用中,電機需要移動到、維護和遵循由用戶輸入定義的角度位置(例如,電位計的旋轉 - 圖 4)。
圖4.由分立元件體現的電機控制系統示例。
同樣,該系統可以使用許多分立元件來實現,或者更簡單地說,可以使用集成解決方案來實現。圖5顯示了使用微轉換器構建的演示系統。電路板上的電路使指針跟隨設定點輸入電位器的旋轉。
圖5.使用分立元件的電機控制系統示例。
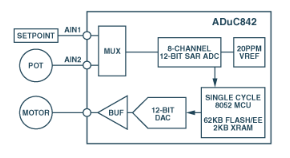
圖6.圖4的片上系統實現。
由于模塊集成在ADuC842的緊湊形式中,因此降低了零件和裝配成本;計算電子設備占用的空間要小得多,而且更可靠。圖 6 顯示了使用 SOC 方法的系統硬件的簡單性。
除ADuC842外,該板還包括一個電位計緩沖放大器、一個驅動電機的輸出功率放大器、一個用于低功耗電子設備的5 V低噪聲穩壓器和一個用于電機的Huskier5 V穩壓器(帶散熱器)。該板還包括狀態 LED、RESET按鈕、串行數據下載按鈕和一些無源元件。
使用PC軟件模擬系統的其余部分,圖7顯示了不同級別的系統調優的響應,并演示了積分項的重要性。
圖7.積分項的三個設置的比例積分 (P-I) 控制。請注意KI = 0時從1.0的偏移,KI = 2000的輕微阻尼振蕩趨勢,KI = 550時振蕩幾乎消除。
使用全PID環路實現時,整體系統階躍響應的改善如圖8所示。響應快速、準確且有阻尼,沒有偏移、振蕩或過沖。
圖8.比例-積分-微分 (PID) 控制響應。
審核編輯:郭婷
-
控制器
+關注
關注
112文章
16444瀏覽量
179074 -
soc
+關注
關注
38文章
4199瀏覽量
218813 -
PID
+關注
關注
35文章
1473瀏覽量
85716
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論