LM2677是TI公司生產(chǎn)的5A最大負(fù)載電流DCDC轉(zhuǎn)換器,可以用它設(shè)計(jì)過(guò)一個(gè)數(shù)控恒壓源,采用數(shù)字PID控制,又用它設(shè)計(jì)了一個(gè)簡(jiǎn)單的用數(shù)字電位器反饋的可調(diào)恒壓源。
2014-09-11 12:48:36 5123
5123 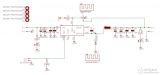
數(shù)字PID控制中的積分在程序中的體現(xiàn),是不是將每次獲得的誤差值相加在積分不發(fā)生作用時(shí),是不是就是誤差的累加和為0
2016-04-12 13:15:50
一.PID控制及作用 PID調(diào)節(jié)器是一種線性調(diào)節(jié)器,這種調(diào)節(jié)器是將設(shè)定值 r ( t )與輸出值 c ( t )進(jìn)行比較構(gòu)成控制偏差e(t)=r(t)-c(t)將其按比例、積分、微分運(yùn)算后,并通過(guò)
2018-04-26 09:55:44
數(shù)字PID控制算法的研究
2016-06-13 11:42:27
ADN8831可以用數(shù)字PID控制嗎?可以的話,電路怎樣接線合適?控制電壓在什么范圍?
2024-01-08 06:43:00
參考UG-858, 通過(guò) DAC 輸出電壓控制 VLDR 和 VSFB .所以,VB=1.5V(VDDD
2017-02-27 18:29:36
對(duì)PID控制系統(tǒng)性能的影響如下表所示:
二、數(shù)字PID控制
隨著計(jì)算機(jī)技術(shù)發(fā)展,目前多以微控制器或計(jì)算機(jī)為運(yùn)算核心,利用軟件程序來(lái)實(shí)現(xiàn)PID控制和校正,也就是數(shù)字PID控制。常用的數(shù)字PID控制方法有
2023-12-22 15:38:41
模擬PID控制、數(shù)字PID控制相關(guān)算法、參數(shù)和程序范例。回復(fù)帖子查看資料下載鏈接:[hide][/hide]
2021-08-06 10:48:36
中已經(jīng)得到了廣泛的應(yīng)用。將其數(shù)字化以后,它克服了模擬PID控制器的許多不足和缺點(diǎn),可以方便調(diào)整PID參數(shù),具有很大的靈活性和適應(yīng)性。與其它控制方法相比,數(shù)字PID具有以下優(yōu)點(diǎn):a、PID算法蘊(yùn)涵了
2016-09-26 10:20:35
的實(shí)現(xiàn)3.5電動(dòng)機(jī)控制中PWM和測(cè)頻在C8051中的實(shí)現(xiàn)3.6C8051與5V電動(dòng)機(jī)控制系統(tǒng)的接口方法習(xí)題與思考題第4章數(shù)字PID控制器與數(shù)字濾波4.1模擬PID控制原理4.2數(shù)字PID控制算法
2016-10-11 08:16:58
流程圖 PID控制算法采用位置式數(shù)字PID控制: 式(7)中u(t)為PID輸出值,e(t)為期望值與實(shí)際值之差,為積分量,為微分量,kp,、ki、kd。為比例、積分、微分系數(shù)。在將積分量,微分量離散化
2016-01-15 17:03:00
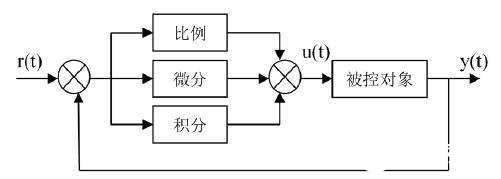
)、積分(Integral)和微分(Differential)通過(guò)線性組合構(gòu)成控制量,用這一控制量對(duì)被控對(duì)象進(jìn)行控制,這樣的控制器稱PID控制器。PID按其控制量可分為:模擬PID控制和數(shù)字PID控制
2016-04-13 11:37:46
控制也存在固有的缺點(diǎn), 容易受模糊規(guī)則有限等級(jí)的限制而引起誤差。而數(shù)字 PID 控制則能夠較好地解決控制精度的問(wèn)題, 并且計(jì)算機(jī)能夠用程序既簡(jiǎn)單又方便地實(shí)現(xiàn)數(shù)字 PID 控制規(guī)律, 對(duì)精度調(diào)整起來(lái)也很
2023-09-20 08:23:39
基于C語(yǔ)言的數(shù)字PID控制算法及實(shí)現(xiàn)
2016-06-13 11:45:24
求一個(gè)用labview仿真軟件搭建的實(shí)驗(yàn)平臺(tái),模擬電路仿真。包括數(shù)字pid控制實(shí)驗(yàn)最少拍(有波紋波紋) 大林算法 多變量解耦控制
2018-05-16 15:49:05
我的畢業(yè)設(shè)計(jì)的論文題目是基于虛擬儀器的掃描探針顯微鏡系統(tǒng)控制·控制方法用的是數(shù)字PID控制··這一過(guò)程要用labview來(lái)模擬···圖片是這掃描探針的工作原理·這一過(guò)程要用labview來(lái)模擬
2016-04-12 10:50:40
控制顯示電路,以數(shù)字形式顯示測(cè)量數(shù)值。同時(shí)根據(jù)偏差值按照測(cè)徑儀—擠出機(jī)數(shù)字PID控制模塊實(shí)現(xiàn)對(duì)擠出機(jī)進(jìn)行控制。 擠出機(jī)需要的是位置信號(hào),因此,測(cè)徑儀—擠出機(jī)數(shù)字PID控制模塊采用位置式PID控制算法
2018-11-26 09:57:26
顯示電路,以數(shù)字形式顯示測(cè)量數(shù)值。同時(shí)根據(jù)偏差值按照測(cè)徑儀—擠出機(jī)數(shù)字PID控制模塊實(shí)現(xiàn)對(duì)擠出機(jī)進(jìn)行控制。 擠出機(jī)需要的是位置信號(hào),因此,測(cè)徑儀—擠出機(jī)數(shù)字PID控制模塊采用位置式PID控制算法,其
2018-10-31 09:12:50
ADN8831可以用數(shù)字PID控制嗎?可以的話,電路怎樣接線合適?控制電壓在什么范圍?
2018-08-16 07:46:14
數(shù)據(jù)處理與控制策略Data Processing & Control Strategy數(shù)字控制器的設(shè)計(jì)技術(shù),數(shù)字濾波和數(shù)據(jù)處理,數(shù)控技術(shù)基礎(chǔ),數(shù)字PID控制算法常規(guī)控制方案,先進(jìn)控制方案,計(jì)算機(jī)控制系統(tǒng)
2009-01-14 15:33:26 27
27 正電流源值和負(fù)電流源值的測(cè)試設(shè)備。附加的功能:50W 自動(dòng)調(diào)諧 TEC SourceMeter全數(shù)字PID控制熱控制回路的自動(dòng)調(diào)諧能力設(shè)計(jì)用于在激光二極管模塊測(cè)試期間
2022-09-21 17:28:17
本文根據(jù)無(wú)位置傳感器無(wú)刷直流電動(dòng)機(jī)的原理,采用TMS320LF2407 DSP與IR2130,實(shí)現(xiàn)了對(duì)無(wú)刷直流電機(jī)的數(shù)字PID控制,并著重對(duì)電機(jī)的PWM調(diào)制方式、IR2130的應(yīng)用、反電動(dòng)勢(shì)過(guò)零檢測(cè)電路
2009-05-30 14:34:49111 、半導(dǎo)體測(cè)試以及具有正負(fù)電流源值的測(cè)試設(shè)備。附加的功能:50W 自動(dòng)調(diào)諧 TEC SourceMeter全數(shù)字PID控制熱控制回路的自動(dòng)調(diào)節(jié)能力設(shè)計(jì)用于在激光二極管模
2022-11-18 15:51:04
提出了一種基于單片機(jī)的溫控系統(tǒng)軟件和硬件的設(shè)計(jì)方案。本設(shè)計(jì)采用8 位單片機(jī)和16 位A/D 變換器相組合構(gòu)成溫度采集系統(tǒng)進(jìn)一步提高系統(tǒng)的性價(jià)比。采用數(shù)字PID 控制使溫控精度
2009-06-20 09:03:4563 本文以Buck(降壓型)DC-DC變換器為例,提出了對(duì)數(shù)字PWM的PID控制器的兩種修正方式:死區(qū)控制方式,平均數(shù)字濾波控制方式。數(shù)字控制器根據(jù)輸出電壓誤差決定是否用該修正方式計(jì)
2009-07-07 14:31:40189 通過(guò)對(duì)研發(fā)一臺(tái)寬幅面彩色噴墨繪圖機(jī)需求的分析,提出了其噴頭小車的驅(qū)動(dòng)設(shè)計(jì)方案。該方案是一個(gè)由LMD18245芯片控制的直流直線電機(jī),直線型容柵位移傳感器以及數(shù)字PID控制算法
2009-07-16 09:55:1044 介紹了一種基于FPGA 的用數(shù)字電路實(shí)現(xiàn)的PID 控制器。把原來(lái)用單片機(jī)實(shí)現(xiàn)的數(shù)字PID 控制算法單獨(dú)用數(shù)字電路來(lái)實(shí)現(xiàn),保留單片機(jī)對(duì)參數(shù)整定
2009-09-15 10:07:2658 本文全面地分析了采樣周期對(duì)微機(jī)控制系統(tǒng)的穩(wěn)定性、動(dòng)態(tài)品質(zhì)、抗干擾能力、數(shù)字PID 的控制作用的影響,并提出了采樣周期可能影響最小相位系統(tǒng)變成非最小相位系統(tǒng)的新論點(diǎn)。
2009-09-16 10:45:448 數(shù)字PID控制技術(shù)
數(shù)字PID控制在生活過(guò)程中是一種最普遍采用的控制方法,在機(jī)電、冶金、機(jī)械、化工等行業(yè)中獲得了廣泛的應(yīng)用。將偏差的比例(P)、積分(I
2010-04-28 14:09:5149 專家PID控制和模糊PID控制
專家PID控制(Expert Control)的實(shí)質(zhì)是基于受控對(duì)象和控制規(guī)律的各種知識(shí),并以智能的方式利用這些知識(shí)來(lái)設(shè)計(jì)控制器。
2010-05-04 15:51:4699 介紹一種以DSP TM320VC5402為核心的近紅外光譜干涉儀中的音圈電機(jī)數(shù)字閉環(huán)控制方法。采用增量式數(shù)字PID控制策略,實(shí)現(xiàn)音圈電機(jī)勻速運(yùn)動(dòng)控制。該系統(tǒng)通過(guò)實(shí)驗(yàn)驗(yàn)證,達(dá)到速度偏差
2010-07-06 16:35:5825 針對(duì)傳統(tǒng)的多通道數(shù)字PID控制器實(shí)時(shí)性較差的特點(diǎn),本文提出一種利用FPGA技術(shù)實(shí)現(xiàn)多通道PID控制器的硬件設(shè)計(jì)方案。并且采用模糊自整定方法對(duì)PID控制器參數(shù)進(jìn)行實(shí)時(shí)調(diào)節(jié),實(shí)現(xiàn)PID
2010-07-20 15:43:2718 目的:掌握數(shù)字PID控制算法在工程應(yīng)用中的實(shí)現(xiàn)技術(shù),包括采樣周期、字長(zhǎng)的選取,無(wú)擾切換與抗積分飽和算法,控制器的正反作用方式等等。
2010-10-20 16:09:3439 針對(duì)在工業(yè)生產(chǎn)過(guò)程中經(jīng)常需要高穩(wěn)定度的恒溫環(huán)境,傳統(tǒng)模擬式儀表結(jié)合簡(jiǎn)單的PID控制較難達(dá)到目標(biāo)的情況,提出了基于數(shù)字PID控制算法和89C52單片機(jī)的溫度控制系統(tǒng)。該系統(tǒng)通過(guò)
2011-01-05 10:59:22138 什么是pid控制器
所謂PID控制,就是在一個(gè)閉環(huán)控制系統(tǒng)中,使被控物理量能夠迅速而準(zhǔn)確地?zé)o限接近于控制目標(biāo)的一種手段。 PID 控制功能是變頻器
2008-09-10 12:39:2716098 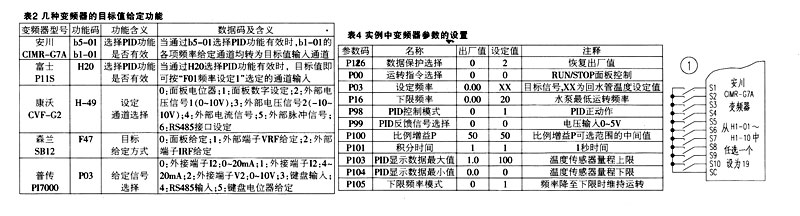
pid控制器原理
在工程實(shí)際中,應(yīng)用最為廣泛的調(diào)節(jié)器控制規(guī)律為比例積分微分控制,簡(jiǎn)稱PID控制,又稱PID調(diào)節(jié)。PID控制器問(wèn)世至
2008-09-10 12:44:5813219 
數(shù)字PID控制實(shí)驗(yàn)
Ⅰ 標(biāo)準(zhǔn)PID 控制算法一.實(shí)驗(yàn)要求1. 了解和掌握連續(xù)控制系統(tǒng)的 PID 控制算法的模擬表達(dá)式(微分
2009-05-15 00:18:087645 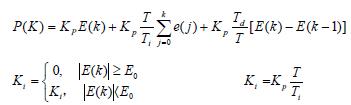
新型瀝青冷再生攪拌設(shè)備控制系統(tǒng)設(shè)計(jì)
本文提出一種新型的基于數(shù)字PID控制的系統(tǒng)設(shè)計(jì)方案。該系統(tǒng)采用自主開(kāi)發(fā)的上位機(jī)軟件和可靠
2009-06-20 14:35:23729 
Buck變換器的數(shù)字模糊PID控制
摘要:由Buck電路的狀態(tài)空間平均法,可得到其電壓控制下的動(dòng)態(tài)小信號(hào)模型,并應(yīng)用PID實(shí)現(xiàn)其
2009-07-16 08:10:372756 
由51單片機(jī)組成的數(shù)字控制系統(tǒng)控制中,PID控制器是通過(guò)PID控制算法實(shí)現(xiàn)的。51單片機(jī)通 過(guò)AD對(duì)信號(hào)進(jìn)行采集,變成數(shù)字信號(hào),再在單片機(jī)中通過(guò)算法實(shí)現(xiàn)PID運(yùn)算,再通過(guò)DA把控制量 反饋回控制源。從而實(shí)現(xiàn)對(duì)系統(tǒng)的伺服控制。
2011-03-16 15:26:36153 摘要﹕本文介紹了一種利用增量PID 控制原理的數(shù)字冰箱控制系統(tǒng)。本系統(tǒng)使用Motorola MC68HC908JL3 單片機(jī)為核心,用增量PID 控制原理,設(shè)計(jì)了一種最佳制冷方案,控制半導(dǎo) 體制冷。測(cè)試表
2011-04-09 10:01:5976 針對(duì)傳統(tǒng) 電加熱 溫度測(cè)控系統(tǒng)存在的普遍問(wèn)題和數(shù)字控制控儀表的設(shè)計(jì)要求,提出了基于數(shù)字PID控制算法和89C52單片機(jī)的溫度控制系統(tǒng)。系統(tǒng)采用AD590傳感器檢測(cè)溫度,溫度信號(hào)經(jīng)A/D
2011-06-08 15:31:27251 基于此思想提出數(shù)字PID控制和無(wú)差拍控制技術(shù)相結(jié)合的控制策略。理論和實(shí)踐證明,該方法具有廣泛的應(yīng)用前景。
2011-06-09 10:36:061532 
為改善傳統(tǒng)的電子負(fù)載的可靠性和適應(yīng)性差的問(wèn)題,設(shè)計(jì)了一種基于DSP的高速數(shù)字控制器。該控制器利用數(shù)字PID控制的優(yōu)點(diǎn),以定點(diǎn)32位DSPTMS320LI2812為控制環(huán)的數(shù)字電子負(fù)載,具有根據(jù)
2011-10-12 15:42:05132 PID控制器是一種最優(yōu)控制。本文講述了增量式PID算法原理與數(shù)字PID算法原理與數(shù)字PID算法程序,詳細(xì)講解了什么是pid算法。
2012-01-01 11:58:2110606 
數(shù)字PID控制算法是將模擬PID離散化得到,各參數(shù)有著明顯的物理意義,調(diào)整方便,所以PID控制器很受工程技術(shù)人員的喜愛(ài)。
2012-01-16 16:27:45902 目前隨著控制理論和電子技術(shù)的發(fā)展,數(shù)字PID控制正逐漸取代模擬PID控制,并逐步成為現(xiàn)代工業(yè)控制器的核心。本文以單回路控制器為基礎(chǔ), 應(yīng)用C語(yǔ)言編程, 來(lái)詳細(xì)說(shuō)明其編程思路。
2012-02-13 17:59:02443 PID控制原理和特點(diǎn) 工程實(shí)際中,應(yīng)用最為廣泛調(diào)節(jié)器控制規(guī)律為比例、積分、微分控制,簡(jiǎn)稱PID控制,又稱PID調(diào)節(jié)。PID控制器問(wèn)世至今已有近70年歷史,它以其結(jié)構(gòu)簡(jiǎn)單、穩(wěn)定性好、工
2012-09-09 09:45:35194481 
2013-07-13 09:16:3335 介紹了獨(dú)立太陽(yáng)能光伏發(fā)電的意義,采用非隔離型Boost/Buck拓?fù)浣Y(jié)構(gòu)為主電路拓?fù)洌攸c(diǎn)分析了主電路的工作原理。設(shè)計(jì)了基于TMS320LF2812的控制系統(tǒng)硬件電路、控制系統(tǒng)軟件及數(shù)字PID控制
2013-09-26 16:06:2993 2014-05-02 09:50:4136 2015-06-23 15:03:514 2015-08-05 17:58:370 2015-10-14 18:55:2233 基本的設(shè)計(jì)核心是運(yùn)用PID調(diào)節(jié)器,從而實(shí)現(xiàn)直流電機(jī)的在帶動(dòng)負(fù)載的情況下也能穩(wěn)定的運(yùn)行。
2016-01-15 17:58:5369 關(guān)于單片機(jī)的電機(jī)調(diào)速裝置, 可實(shí)現(xiàn)電機(jī)的定速與反向控制
2016-03-15 11:04:4133 數(shù)字PID控制,非常有用的資料,有需要的下來(lái)看看。
2016-04-01 15:19:000 PID控制原理及應(yīng)用,PID經(jīng)典控制理論。
2016-04-29 16:50:2629 以前寫論文收集的一些資料,學(xué)習(xí)PID控制的好資料!!!!
2016-06-06 10:00:466 以前寫論文收集的一些資料,學(xué)習(xí)PID控制的好資料!!!!
2016-06-06 09:42:110 數(shù)字PID算法在無(wú)刷直流電機(jī)控制器中的應(yīng)用
2016-11-08 18:51:165 很好的文檔,和總結(jié)
2016-12-16 20:17:490 數(shù)字PID控制
2017-01-24 15:41:2514 PID 控制技術(shù)廣泛應(yīng)用于工業(yè)控制各個(gè)領(lǐng)域,其控制結(jié)構(gòu)簡(jiǎn)單,參數(shù)定義明確,易于實(shí)現(xiàn),其中 P( Proportional)是比例項(xiàng),I( Integral) 是積分項(xiàng),D( Derivative
2017-09-16 09:35:153 信號(hào)處理器(DSP)控制技術(shù)的發(fā)展,為實(shí)現(xiàn)弧焊電源數(shù)字控制提供了可行性的方案。本文將DSP控制技術(shù)和數(shù)字PID控制算法很好的結(jié)合起來(lái)進(jìn)行研究,大大提高了弧焊電源的工作效率。
2017-11-16 15:40:2815 τ為純滯后時(shí)間,K為放大倍數(shù),T為慣性時(shí)間。在滯后時(shí)間和慣性時(shí)間均不太大、控制對(duì)象非線性小,參數(shù)時(shí)變性小的場(chǎng)合,RID控制是一種最直接最有效的控制方法。本文采用數(shù)字PID控制技術(shù),設(shè)計(jì)了一個(gè)實(shí)驗(yàn)室可用、中小型的、溫度在環(huán)境溫度至此320℃范圍內(nèi)可調(diào)的電加熱爐溫度控制系統(tǒng),系統(tǒng)結(jié)構(gòu)如圖1所示。
2018-07-27 07:02:003340 
改善系統(tǒng)的動(dòng)態(tài)響應(yīng)特性;外環(huán)采用瞬時(shí)值的數(shù)字PI算法,輸出電壓的瞬時(shí)值信號(hào)直接反饋,與參考正弦電壓比較,使輸出電壓穩(wěn)定在設(shè)定值上,并抑制輸出電壓的畸變。兩種控制算法能互相彌補(bǔ)各自控制上的不足,使系統(tǒng)得到較好的控制效果。
2018-07-04 07:35:002959 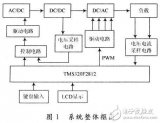
摘要: 針對(duì)傳統(tǒng)電加熱溫度測(cè)控系統(tǒng)存在的普遍問(wèn)題和數(shù)字控制控儀表的設(shè)計(jì)要求,提出了基于數(shù)字PID控制算法和89C52單片機(jī)的溫度控制系統(tǒng)。系統(tǒng)采用AD590傳感器檢測(cè)溫度,溫度信號(hào)經(jīng)A/D8080
2018-01-18 03:13:24802 提出了一種基于串級(jí)PID控制算法的壓控大功率電流源設(shè)計(jì)方案。該電流源在內(nèi)環(huán)電路采用PID控制電路,提高電流響應(yīng)速度;外環(huán)電路采用數(shù)字PID控制算法,精確控制電流輸出的串級(jí)PID控制模式。
2018-02-10 13:25:033680 
增量式PID控制,數(shù)字PID控制算法的一種基本形式,是通過(guò)對(duì)控制量的增量(本次控制量和上次控制量的差值)進(jìn)行PID控制的一種控制算法。
2018-02-26 14:57:3250810 如何利用高速dsp和準(zhǔn)pid控制的數(shù)字控制電源?
2018-04-09 11:15:0924 的生產(chǎn)利益甚至存亡。 目前在國(guó)內(nèi)外很多溫度控制系統(tǒng)都采用ARM 作為處理器,PID 作為溫度控制方式[1]。該控制方式對(duì)大多數(shù)控制對(duì)象均可達(dá)到滿意的控制效果,但對(duì)于有特殊要求或具有復(fù)雜對(duì)象特性的系統(tǒng),采用數(shù)字PID控制一般難以達(dá)到目的
2018-09-16 16:12:01818 目前在國(guó)內(nèi)外很多溫度控制系統(tǒng)都采用ARM 作為處理器,PID 作為溫度控制方式[1]。該控制方式對(duì)大多數(shù)控制對(duì)象均可達(dá)到滿意的控制效果,但對(duì)于有特殊要求或具有復(fù)雜對(duì)象特性的系統(tǒng),采用數(shù)字PID控制
2018-10-15 09:19:009233 
本文檔的主要內(nèi)容詳細(xì)介紹的是數(shù)字PID控制算法教程之如何對(duì)標(biāo)準(zhǔn)PID算法進(jìn)行改進(jìn)主要內(nèi)容包括了:對(duì)標(biāo)準(zhǔn)PID算法的改進(jìn),飽和問(wèn)題及其抑制,數(shù)字濾波,Smith
2018-12-04 08:00:0015 PID控制是最早發(fā)展起來(lái)的控制策略之一,由于其算法簡(jiǎn)單,魯棒性好和可靠性高,被廣泛應(yīng)用于工業(yè)過(guò)程控制,尤其用于可簡(jiǎn)歷精確數(shù)學(xué)模型的確定性控制系統(tǒng)。而實(shí)際生產(chǎn)過(guò)程往往具有非線性、時(shí)變不確定性,難以建立
2018-12-19 16:46:5311 基于數(shù)字信號(hào)處理器(DSP)TMS320I F 2407和外接D/A轉(zhuǎn)換芯片,實(shí)現(xiàn)數(shù)字PID控制器,采用的PID控制算法是增量式PID控制算法,包括其硬件結(jié)構(gòu)和軟件設(shè)計(jì)。對(duì)PID控制算法及如何用
2019-01-02 16:30:0333 本文檔的主要內(nèi)容詳細(xì)介紹的是各類PID算法的資料合集免費(fèi)下載主要內(nèi)容包括了:第1章 數(shù)字 PID 控制,第2 章 常用的 PID 控制系統(tǒng),第3章 專家 PID 控制和模糊PID控制, 第4章 神經(jīng)
2019-01-23 08:00:0063 本文檔詳細(xì)介紹的是先進(jìn)PID控制及其MATLAB仿真的詳細(xì)資料說(shuō)明主要內(nèi)容包括了:1.PID控制原理,2.連續(xù)系統(tǒng)的模擬PID仿真,3.數(shù)字PID控制
2019-02-25 08:00:0011 的實(shí)現(xiàn)。該系統(tǒng)具有結(jié)構(gòu)靈活,通用性強(qiáng)的特點(diǎn),且大大減少了系統(tǒng)的外圍接口器件,降低了成本。采用Bang—Bang控制和數(shù)字PID控制相結(jié)合的雙模控制算法,滿足了系統(tǒng)響應(yīng)快速性和穩(wěn)定性的要求,提高了可靠性,具有很高的實(shí)用價(jià)值。
2019-03-05 16:30:279 本文檔的主要內(nèi)容詳細(xì)介紹的是數(shù)字PID控制直流電機(jī)程序清單資料合集免費(fèi)下載。
2019-05-24 17:07:3223 系統(tǒng)的穩(wěn)定性分析,實(shí)驗(yàn)四 系統(tǒng)頻率特性測(cè)量,實(shí)驗(yàn)五 連續(xù)系統(tǒng)串聯(lián)校正,實(shí)驗(yàn)六 數(shù)字PID控制,實(shí)驗(yàn)七 狀態(tài)反饋與狀態(tài)觀測(cè),實(shí)驗(yàn)八 解耦控制,實(shí)驗(yàn)九 采樣實(shí)驗(yàn),實(shí)驗(yàn)十 非線性實(shí)驗(yàn),實(shí)驗(yàn)十一 相軌跡實(shí)驗(yàn),實(shí)驗(yàn)十二 根軌跡觀測(cè)實(shí)驗(yàn))
2019-06-14 08:00:003 PID控制中有P、I、D三個(gè)參數(shù),只有明白這三個(gè)參數(shù)的含義和作用才能完成控制器PID參數(shù)整定,讓控制器到達(dá)最佳控制效果。能熟練進(jìn)行PID參數(shù)整定,將自動(dòng)控制系統(tǒng)投自動(dòng),這代表著工程技術(shù)人員的自動(dòng)化技能水平,但很多人并未真正掌握PID控制和PID參數(shù)整定。
2019-07-18 16:10:3228387 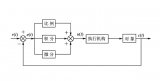
和離散系統(tǒng)的PID控制;常用數(shù)字PID控制;專家PID和模糊PID控制;神經(jīng)PID控制;遺傳算法PID控制;多變量解耦PID控制;幾種先進(jìn)的PID控制;灰色PID控制;伺服系統(tǒng)PID控制;PID實(shí)時(shí)控制等內(nèi)容。每種方法都通過(guò)MATLAB仿真程序進(jìn)行了說(shuō)明,所有仿真程序均存
2019-09-19 17:48:19157 和離散系統(tǒng)的PID控制;常用數(shù)字PID控制;專家PID和模糊PID控制;神經(jīng)PID控制;遺傳算法PID控制;多變量解耦PID控制;幾種先進(jìn)的PID控制;灰色PID控制;伺服系統(tǒng)PID控制;PID實(shí)時(shí)控制等內(nèi)容。每種方法都通過(guò)MATLAB仿真程序進(jìn)行了說(shuō)明,所有仿真程序均存
2019-11-13 16:24:2360 和離散系統(tǒng)的PID控制;常用數(shù)字PID控制;專家PID和模糊PID控制;神經(jīng)PID控制;遺傳算法PID控制;多變量解耦PID控制;幾種先進(jìn)的PID控制;灰色PID控制;伺服系統(tǒng)PID控制;PID實(shí)時(shí)控制等內(nèi)容。每種方法都通過(guò)MATLAB仿真程序進(jìn)行了說(shuō)明,所有仿真程序均存
2019-11-21 15:26:5488 隨著DSP等數(shù)字信號(hào)處理器的出現(xiàn),電力電子電路的數(shù)字控制得到了很大的發(fā)展。數(shù)字處理器能夠瞬時(shí)讀取變換器的輸出值,并快速地計(jì)算出控制值對(duì)變換器進(jìn)行控制。由于數(shù)字控制可以采用靈活的控制策略,一些先進(jìn)
2020-04-18 13:42:002429 連續(xù)系統(tǒng)和離散系統(tǒng)的 PID 控制,常用數(shù)字 PID 控制,專家 PID 和模糊 PID 控制,神經(jīng) PID 控制,遺傳算法 PID 控制,多變量解耦 PID 控制,幾種先進(jìn)的 PID 控制,灰色
2020-05-22 08:00:0018 通過(guò)實(shí)驗(yàn)設(shè)計(jì)或計(jì)算機(jī)仿真設(shè)計(jì),使學(xué)生了解和掌握數(shù)字PID控制算法的特點(diǎn)、了解系統(tǒng)PID參數(shù)整定和數(shù)字控制系統(tǒng)的直接設(shè)計(jì)的基本方法,了解不同的控制算法對(duì)被控對(duì)象的控制特性,加深對(duì)計(jì)算機(jī)控制系統(tǒng)理論的認(rèn)識(shí),掌握計(jì)算機(jī)控制系統(tǒng)的整定技術(shù),對(duì)系統(tǒng)整體設(shè)計(jì)有一個(gè)初步的了解。
2020-06-17 08:00:000 PID調(diào)節(jié)是比例、積分、微分三者英文的縮寫,是連續(xù)系統(tǒng)中應(yīng)用最為廣泛的一個(gè)調(diào)節(jié)方式。PID調(diào)節(jié)的實(shí)質(zhì)就是根據(jù)輸入的偏差值,按比例、積分、微分的函數(shù)關(guān)系進(jìn)行運(yùn)算,其運(yùn)算結(jié)果用以輸出控制。在實(shí)際應(yīng)用中,根據(jù)被控對(duì)象的特性和控制要求,可靈活地改變PID的結(jié)構(gòu),以充分發(fā)揮計(jì)算機(jī)的作用。
2020-07-13 10:26:181749 各控制分量的作用如下(1)比例(P)控制成比例地反映控制系統(tǒng)的偏差信號(hào),偏差一旦產(chǎn)生,控制器立即產(chǎn)生控制作用,以減少偏差。(2)積分(1)控制主要用于消除靜差,提高系統(tǒng)的無(wú)差度。積分作用的強(qiáng)弱取決
2020-09-15 08:00:000 本文首先介紹在線式UPS的基本原理以及逆變器的SPWM調(diào)壓方法,研究死區(qū)對(duì)逆變器輸出電壓的影響及其補(bǔ)償方法。在分析單相全橋逆變器數(shù)學(xué)模型的基礎(chǔ)上,比較數(shù)字PID控制、無(wú)差拍控制、重復(fù)控制、模糊控制
2021-05-19 09:56:4460 作為經(jīng)典的控制理論,PID控制規(guī)律仍然是當(dāng)今工控行業(yè)的主導(dǎo)控制方式,無(wú)論復(fù)雜、簡(jiǎn)單的控制任務(wù),PID控制都能取得滿意的控制效果,前提是PID參數(shù)必須選擇合適。可以說(shuō),通過(guò)適當(dāng)?shù)?b class="flag-6" style="color: red">PID參數(shù),PID控制
2021-06-01 10:28:0157 單片機(jī)的數(shù)字PID控制直流電機(jī)系統(tǒng)(實(shí)用電源技術(shù)pdf)-該文檔為單片機(jī)的數(shù)字PID控制直流電機(jī)系統(tǒng)講解文檔,是一份還算不錯(cuò)的參考文檔,感興趣的可以下載看看,,,,,,,,,,,,,,
2021-09-28 11:15:0015 的飛速發(fā)展,發(fā)生了由模擬PID控制到數(shù)字PID控制的重大轉(zhuǎn)變。與此同時(shí)還涌現(xiàn)出了許多新型PID控制算法和控制方式。例如,非線性PID控制、自適應(yīng) PID控制、智能PID 控制等等。
2022-09-22 14:05:483552 FOC算法中的電流環(huán),速度環(huán)都涉及到PID控制
PID又分位置式PID控制算法和增量式PID控制算法,而個(gè)人認(rèn)為在電機(jī)控制中使用增量式PID效果會(huì)更好一些。下面主要介紹幾種增量式PID
控制算法及C代碼實(shí)現(xiàn)。
2023-05-05 11:51:0610
 電子發(fā)燒友App
電子發(fā)燒友App










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論