") 步進(jìn)電機(jī)的內(nèi)部結(jié)構(gòu)及驅(qū)動方法
步進(jìn)電機(jī)的內(nèi)部結(jié)構(gòu)及驅(qū)動方法
步進(jìn)電機(jī)每輸入一個脈沖信號,轉(zhuǎn)子就轉(zhuǎn)動一個角度或前進(jìn)一步,其輸出的角度輸入的脈沖數(shù)成正比,轉(zhuǎn)速與脈沖頻率成正比。它的驅(qū)動方式也比普通的有刷直流電機(jī)復(fù)雜。
本節(jié)我們就來講講步進(jìn)電機(jī)最基礎(chǔ)的驅(qū)動方式。
1)步進(jìn)電機(jī)的內(nèi)部結(jié)構(gòu)
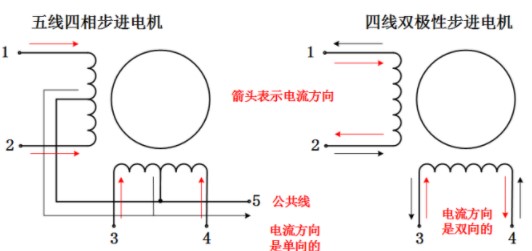
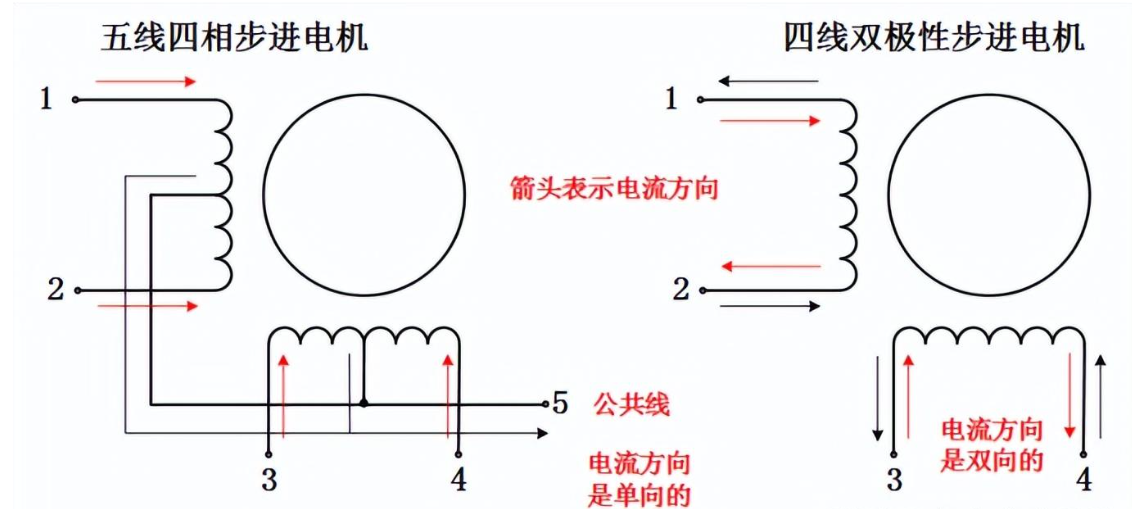
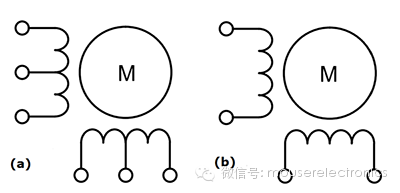
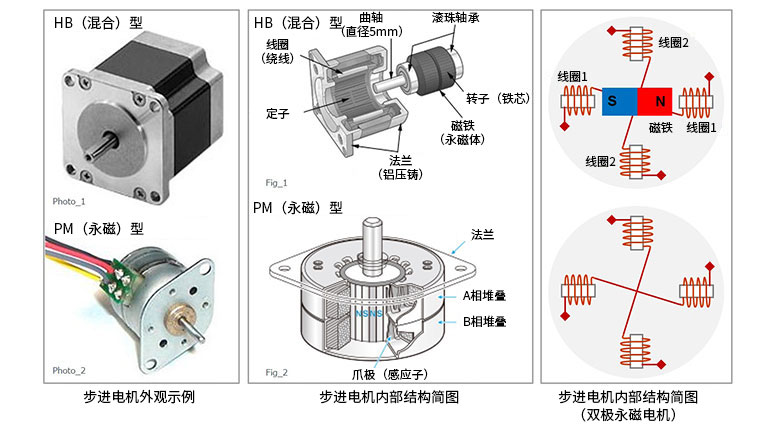
先簡單介紹一下主要的兩種步進(jìn)電機(jī):單極性和雙極性。
如下圖所示,左邊是單極性電機(jī);右邊是雙極性電機(jī)。單極性電機(jī)線圈內(nèi)的電流只有一個方向,雙極性電機(jī)線圈內(nèi)的電流是雙向的:
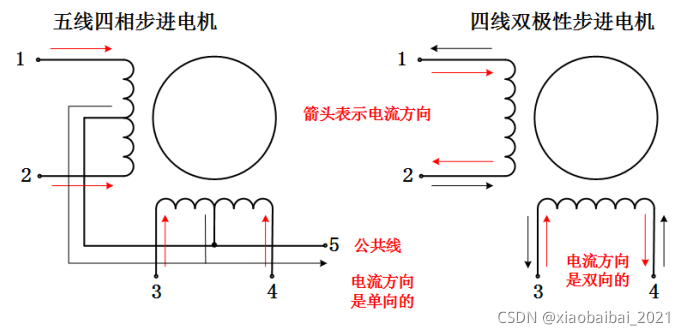
而相數(shù),則是內(nèi)部線圈的組數(shù);一般的步進(jìn)電機(jī)都可以看作是兩相電機(jī)變化而來的。
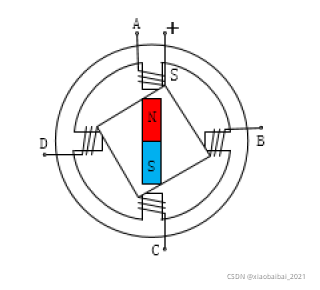
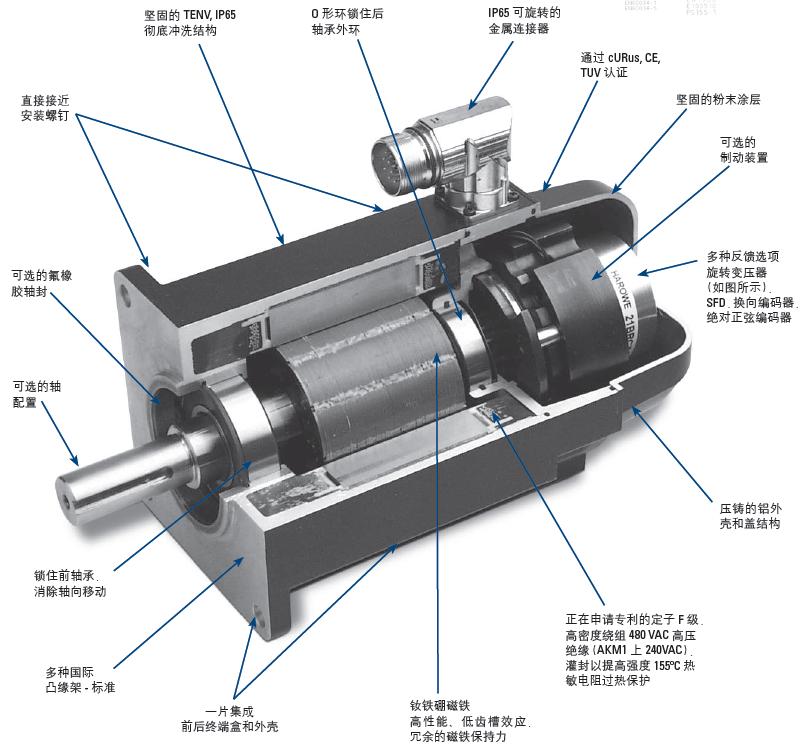
本文我們使用最簡單的五線四相制的電機(jī)(28BYJ-48),驅(qū)動方法也都是以它來講的,其他種類的大同小異。就是如下圖這種步進(jìn)電機(jī),以及驅(qū)動板:
它內(nèi)部的接線關(guān)系如下圖所示,正極是公共的,其他四個端口各對應(yīng)一組線圈的負(fù)極:
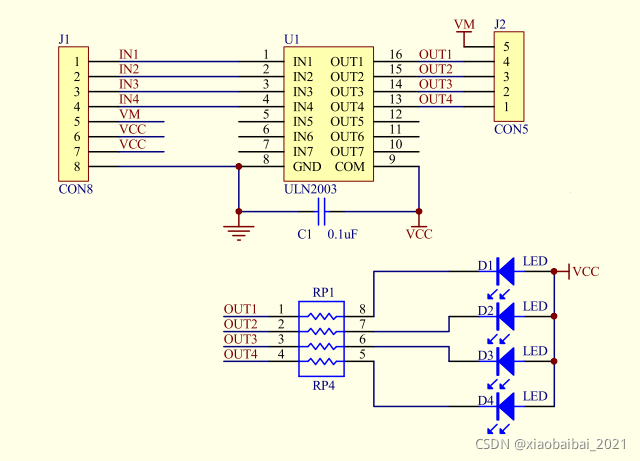
驅(qū)動板的原理圖如下,就是一個nln2003的達(dá)林頓管驅(qū)動器(忽略右下角的燈,基本毫無用處⊙﹏⊙b汗),IN1IN4處輸入高電平,對應(yīng)的OUT1OUT4會輸出低電平:
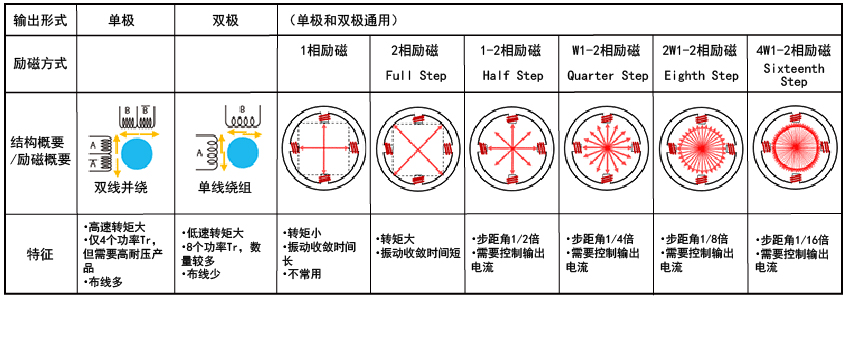
2)步進(jìn)電機(jī)的驅(qū)動方法
最基本的方法有3種,單4拍法、雙4拍法、單雙8拍法。
a)單4拍法驅(qū)動
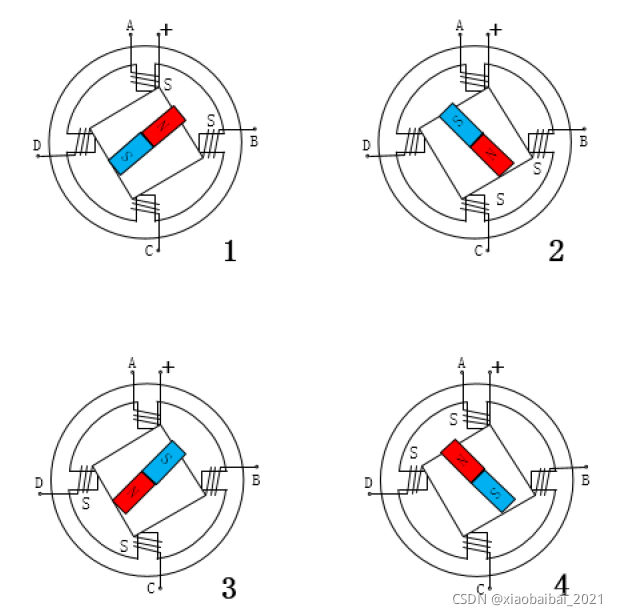
驅(qū)動過程如下圖所示,4個步驟一個周期,每個時刻只有一相通電:
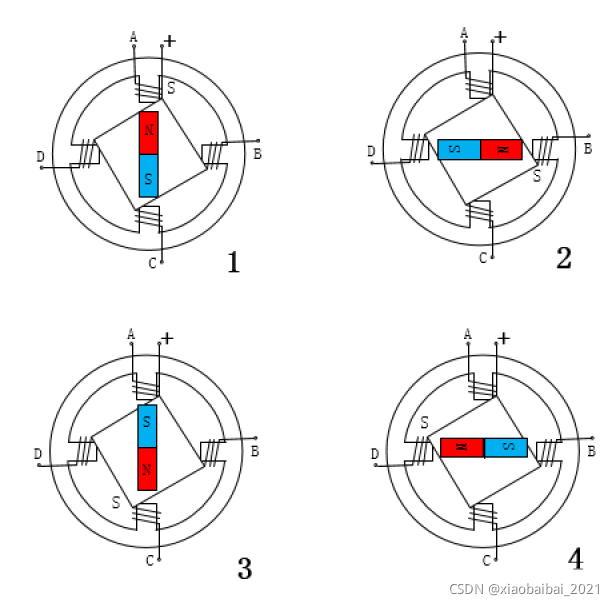
先給A相通電,其他相斷電,則轉(zhuǎn)子的對應(yīng)極被吸引到A相處,如步驟1;
后續(xù)依次給B、C、D相通電,則轉(zhuǎn)子會轉(zhuǎn)到B、C、D處,如步驟2、3、4;
最后再給A相通電,其他相斷電,轉(zhuǎn)子又回到A處;周而復(fù)始,使得轉(zhuǎn)子不斷旋轉(zhuǎn)。
各相的導(dǎo)通過程如下圖所示:
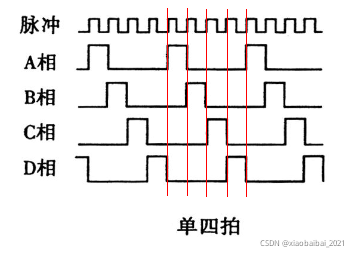
這種方法每次都只有一相通電,所以稱為單4拍法。
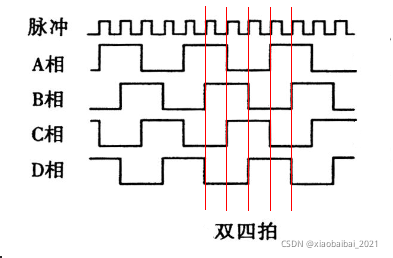
b)雙4拍法驅(qū)動
驅(qū)動過程如下圖所示,也是4個步驟一個周期,不同的是每個時刻都有相鄰的兩相通電:
先給A相、B相通電,其他相斷電,則轉(zhuǎn)子的對應(yīng)極被吸引到A、B相中間處,如步驟1;
后續(xù)依次給BC、CD、DA相通電,如步驟2、3、4;
最后再給A、B相通電,其他相斷電,轉(zhuǎn)子又回到AB相之間;周而復(fù)始,使得轉(zhuǎn)子不斷旋轉(zhuǎn)。
雙4拍法每個時刻會有兩組線圈導(dǎo)通,所以電機(jī)的輸出力矩比單4拍法更大。
各相的導(dǎo)通過程如下圖所示:
c)單雙8拍法驅(qū)動
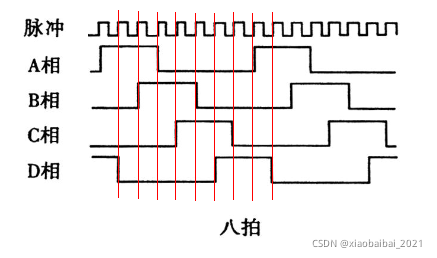
驅(qū)動過程如下圖所示,8個步驟一個周期:
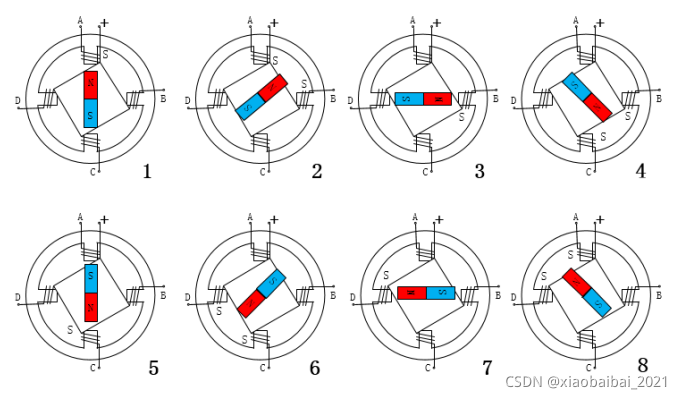
這種方法類似于單4拍和雙4拍的組合。
先給A相通電,其他相斷電,轉(zhuǎn)子在A處;
再給A、B相通電,其他相斷電,則轉(zhuǎn)子來到AB之間;
然后給B相通電,其他相斷電,轉(zhuǎn)子來到B處;
再給B、C相通電,其他相斷電,轉(zhuǎn)子來到BC之間;
之后類似,一共8個步驟可以完成一個周期的運(yùn)動。
8拍法驅(qū)動時,轉(zhuǎn)子的位置比4拍法多兩個中間態(tài),所以轉(zhuǎn)動時的位置控制更加精確一些,但是由于它有時是一相通電,有時是兩相通電,所以在不同位置的力矩是不同的。
各相的導(dǎo)通過程如下圖所示:
3)使用stm32編程驅(qū)動電機(jī)
先看連接方式,使用PA0、PA1、PA2、PA3驅(qū)動A、B、C、D四相。PA03連接到驅(qū)動板的IN1IN4;驅(qū)動板使用5V供電。
經(jīng)過上一節(jié)了解了上述三種驅(qū)動方法后,就很容易寫出驅(qū)動代碼了。
如下是單4拍驅(qū)動的主要代碼:

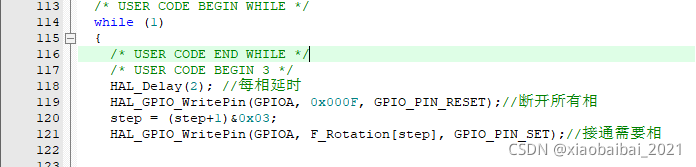
定義兩個常量數(shù)組,F(xiàn)_Rotation存正向旋轉(zhuǎn)的各相導(dǎo)通值,B_Rotation存反向旋轉(zhuǎn)的值;
主循環(huán)中,每隔一個周期,去改變接通的相,4個拍一循環(huán),就能實現(xiàn)電機(jī)轉(zhuǎn)動了。
雙四拍只要將定義的數(shù)組值更改一下就可以實現(xiàn)。
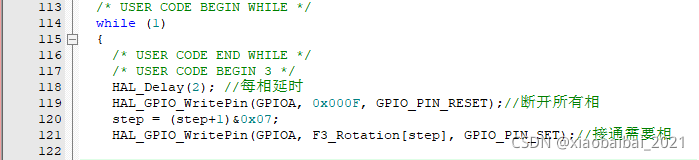
如下是8拍驅(qū)動的代碼,原理是一樣的,就不多解釋了:

4)注意事項
對于確定的驅(qū)動方式,步進(jìn)電機(jī)每拍轉(zhuǎn)過的角度是相同的,所以,如果想要改變轉(zhuǎn)速,只要改變每拍的延時就可以了,也就是改變周期。
但是要注意,不能超過電機(jī)參數(shù)要求,如我們使用的這個電機(jī)(28BYJ-48)的參數(shù):
最大空載牽出頻率>900pps,最大空載牽入頻率>500pps。
也就是說空載轉(zhuǎn)動時,最快的驅(qū)動拍頻率最好不要超過900Hz;空載啟動時,最快的驅(qū)動拍頻率最好不要超過500Hz,因為啟動時初始轉(zhuǎn)速從零開始,驅(qū)動拍太快的話會失步,可能無法轉(zhuǎn)動起來。所以程序里也設(shè)計成了500Hz(2ms延時)一拍。
一般情況下,系統(tǒng)最好設(shè)計成,啟動時慢轉(zhuǎn)速,之后逐漸加快到需要的轉(zhuǎn)速。
-
直流電機(jī)
+關(guān)注
關(guān)注
36文章
1710瀏覽量
70324 -
步進(jìn)電機(jī)
+關(guān)注
關(guān)注
151文章
3118瀏覽量
147717 -
脈沖信號
+關(guān)注
關(guān)注
6文章
400瀏覽量
37039
發(fā)布評論請先 登錄
相關(guān)推薦
步進(jìn)電機(jī)的內(nèi)部結(jié)構(gòu)與驅(qū)動方法
步進(jìn)電機(jī)的內(nèi)部結(jié)構(gòu)及接線方法
步進(jìn)電機(jī)的原理是什么?其內(nèi)部結(jié)構(gòu)是怎樣的
從步進(jìn)電機(jī)驅(qū)動IC的角度看步進(jìn)電機(jī)
分析步進(jìn)電機(jī)的驅(qū)動原理
關(guān)于步進(jìn)電機(jī)的內(nèi)部結(jié)構(gòu)的介紹
步進(jìn)電機(jī)的內(nèi)部結(jié)構(gòu)資料下載

Delta繞線電機(jī)的內(nèi)部結(jié)構(gòu)介紹
步進(jìn)電機(jī)的結(jié)構(gòu)
步進(jìn)電機(jī)的驅(qū)動方式與特征
步進(jìn)電機(jī)驅(qū)動基礎(chǔ)
步進(jìn)電機(jī)的結(jié)構(gòu)及基本工作原理






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論