") UWB的定位算法簡(jiǎn)單介紹
UWB的定位算法簡(jiǎn)單介紹
根據(jù)上一篇的介紹,UWB的定位算法可以分為三類:基于接收信號(hào)的強(qiáng)度(RSS,Received Signal Strength)、基于到達(dá)角度(Angle of Arrival)、基于到達(dá)時(shí)間(TOA,Time of Arrival)。不管是什么方式,其技術(shù)實(shí)現(xiàn)大致是一樣的:都是通過測(cè)量接收信號(hào)中的某些特征值,比如信號(hào)強(qiáng)度、角度、時(shí)間等,再采用相關(guān)算法來實(shí)現(xiàn)對(duì)目標(biāo)的定位。下面分別介紹這三類算法:
RSS的原理是通過坐標(biāo)位置已知的探測(cè)器測(cè)量待測(cè)目標(biāo)所在位置的信號(hào)強(qiáng)度,由于信號(hào)強(qiáng)度與信號(hào)衰減滿足一定的關(guān)系,可以利用它來估算出待測(cè)目標(biāo)到當(dāng)前測(cè)量探測(cè)器的距離。其定位原理與TOA相同,只是獲取距離的方法不一樣,對(duì)于RSS,其測(cè)量的距離和衰減之間的關(guān)系依賴于信道特性,所以具有一個(gè)精確的傳輸模型是可靠估計(jì)距離的前提。然而未知環(huán)境下,其信號(hào)的傳輸模型未知,因而其定位誤差通常較大。
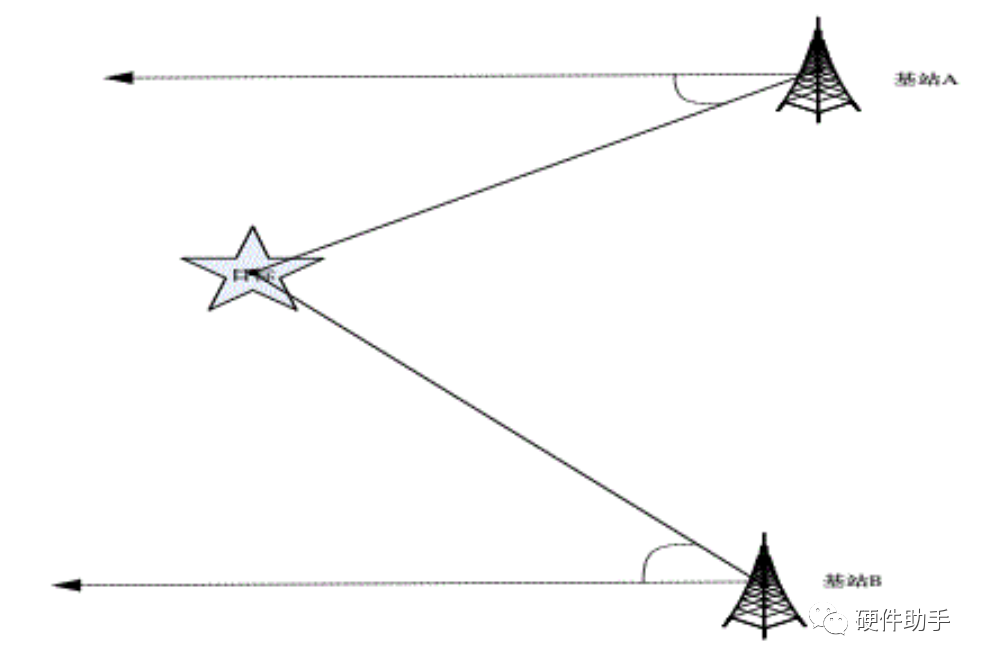
AOA定位是通過基站A和基站B的接收天線或天線陣列,分別測(cè)量出A、B與目標(biāo)之間的角度值,該角度使接收機(jī)到移動(dòng)臺(tái)組成一條射線,該角度稱為方位角,該射線稱為方位線。使用兩個(gè)或兩個(gè)以上的AOA方位線,即可得出多條射線的交點(diǎn),該交點(diǎn)幾位待測(cè)目標(biāo)的估計(jì)位置。
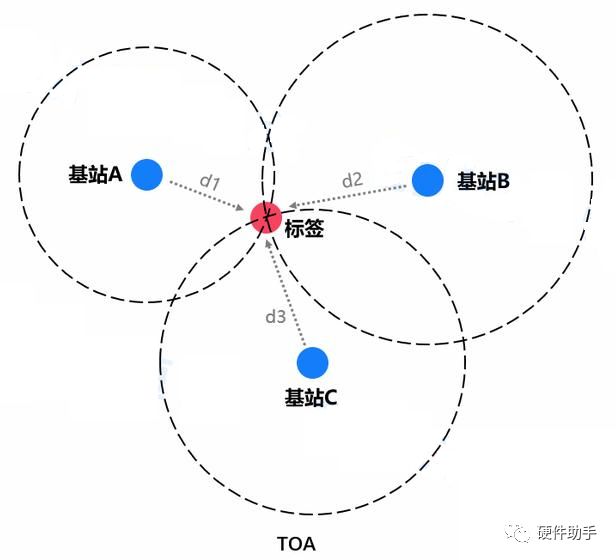
TOA定位法是通過獲得N個(gè)位置已知的基站和待測(cè)目標(biāo)之間的直線距離(測(cè)量?jī)牲c(diǎn)之間的距離,主要有兩種方法,一種是測(cè)量?jī)牲c(diǎn)之間的傳播時(shí)間(也就是TOF),另一種是測(cè)量到達(dá)信號(hào)的場(chǎng)強(qiáng)變化(也就是RSS)),根據(jù)幾何原理實(shí)現(xiàn)定位。為了實(shí)現(xiàn)對(duì)待測(cè)目標(biāo)的定位,在無先驗(yàn)知識(shí)的情況下,需要基站的數(shù)量至少為三個(gè),以三個(gè)基站的位置坐標(biāo)為圓心,他們分別與待測(cè)目標(biāo)之間的距離為半徑畫圓,在無NLOS誤差的情況下,待測(cè)目標(biāo)必然在三個(gè)圓的交點(diǎn)上。
TOF的實(shí)現(xiàn)方式是需要目標(biāo)和基站之間進(jìn)行兩次TOA估算,并減去中間處理時(shí)間得到目標(biāo)和基站之間的往返時(shí)間。其定位原理和TOA相同,有點(diǎn)在于需要兩個(gè)節(jié)點(diǎn)之間有共同的時(shí)鐘。因?yàn)樗峭ㄟ^測(cè)量一個(gè)節(jié)點(diǎn)收發(fā)信息的往返時(shí)間來估計(jì)兩點(diǎn)之間的距離。
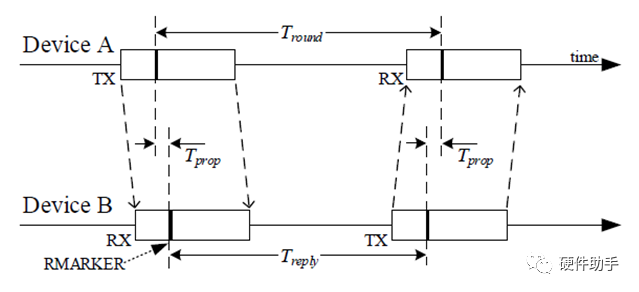
由于TOF在實(shí)際應(yīng)用中有各種各樣的問題,比如由于設(shè)備B時(shí)鐘源的自我偏差PPM會(huì)導(dǎo)致每次Tdelay的不一致性等等。因此TOF也有很多變種,比如RTOF(也叫TW-TOF或者DS-TWR)這種不需要同步的方式,也有TDOA這種需要系統(tǒng)有精確的時(shí)間同步功能。
TW-TOF是TOF(也叫SS-TWR)的一種擴(kuò)展測(cè)距方法,記錄了兩個(gè)往返的時(shí)間戳,最后得到飛行時(shí)間,雖然增加了響應(yīng)的時(shí)間,但會(huì)降低測(cè)距誤差。雙邊雙向測(cè)距根據(jù)發(fā)送消息個(gè)數(shù)不同,分為兩種方法:
- 4消息方式(4 messages)
- 3消息方式(3 messages)
雙邊雙向測(cè)距4消息方式分為兩次測(cè)距,設(shè)備A主動(dòng)發(fā)起第一次測(cè)距消息,設(shè)備B響應(yīng),得到4個(gè)時(shí)間戳;然后過了一段時(shí)間,設(shè)備B主動(dòng)發(fā)起測(cè)距,設(shè)備A響應(yīng),同樣得到4個(gè)不同的時(shí)間戳。
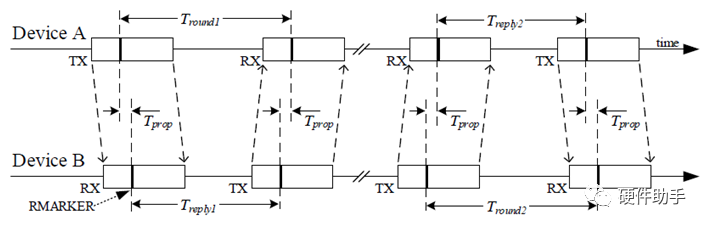
雙邊雙向測(cè)距3消息方式相比較于4消息方式,省掉了第二次測(cè)距的發(fā)起動(dòng)作,當(dāng)設(shè)備A收到數(shù)據(jù)之后,立刻返回?cái)?shù)據(jù),最終也可以得到四個(gè)時(shí)間差。
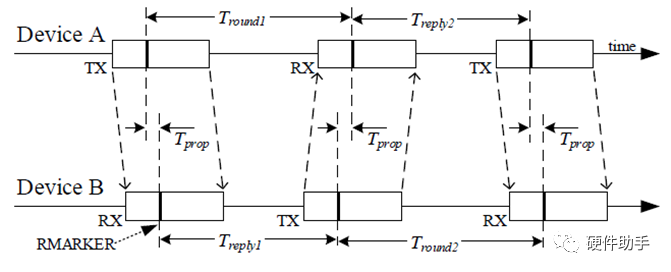
得到四個(gè)時(shí)間戳就可以根據(jù)下面的公式進(jìn)行計(jì)算了:

TDOA是基于到達(dá)時(shí)間差定位,系統(tǒng)中需要有精確時(shí)間同步功能。時(shí)間同步有兩種:
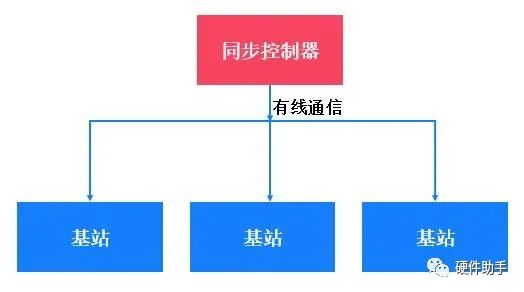
一種是通過有線做時(shí)間同步,同步精度非常高,能控制到0.1ns,但由于采用有線,所有設(shè)備要么采用中心網(wǎng)絡(luò)的方式,要么采用級(jí)聯(lián)的方式,但增加了網(wǎng)絡(luò)維護(hù)的復(fù)雜度,也增加了施工的復(fù)雜度,成本較高。并且,系統(tǒng)中還有一個(gè)專用的有線時(shí)間同步器,價(jià)格比較貴。
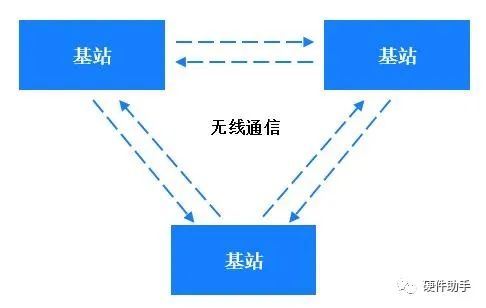
另一種是通過無線做時(shí)間同步,采用無線同步一般可以達(dá)到0.25ns,精度稍遜于有線時(shí)間同步,但其UWB定位系統(tǒng)相對(duì)來說更為簡(jiǎn)單,定位基站只需要供電,數(shù)據(jù)回傳可以采用WiFi的方式,有效降低了成本。
TDOA定位不必要進(jìn)行基站和移動(dòng)終端之間的同步,而只需要基站之間進(jìn)行同步。因?yàn)榛镜奈恢檬枪潭ǖ模局g進(jìn)行同步與基站和移動(dòng)終端之間進(jìn)行同步要容易實(shí)現(xiàn)得多。這使得TDOA定位比TOA定位要更加容易實(shí)現(xiàn),所以TDOA定位的應(yīng)用非常廣泛。
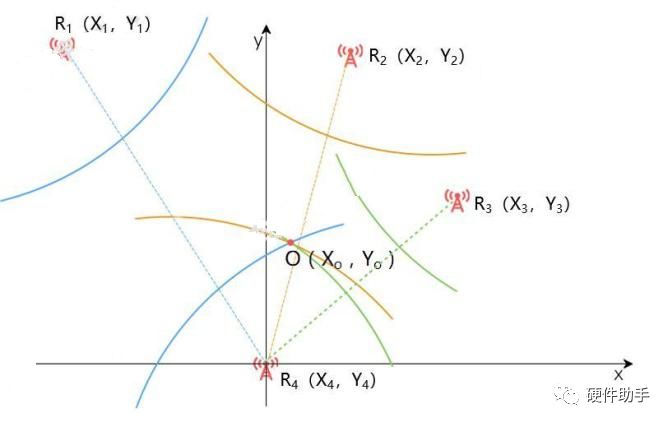
TDOA定位在二維定位中需要使用4個(gè)定位基站。基站時(shí)間同步之后,標(biāo)簽發(fā)送一個(gè)廣播報(bào)文,基站收到之后,標(biāo)記接收到此報(bào)文的時(shí)間戳,并將內(nèi)容發(fā)送到計(jì)算服務(wù)器,計(jì)算服務(wù)器根據(jù)其他基站的定位報(bào)文的時(shí)間戳,計(jì)算出被定位目標(biāo)的位置。
通過測(cè)量標(biāo)簽到每?jī)蓚€(gè)基站之間的距離差,距離差等于常量即可繪制出雙曲線,而曲線交點(diǎn)即可確定標(biāo)簽坐標(biāo)。該方法實(shí)現(xiàn)過程中,標(biāo)簽只需要廣播一次UWB信號(hào)即可,因此有利于標(biāo)簽的功耗及標(biāo)簽并發(fā)數(shù)量。
-
RSS
+關(guān)注
關(guān)注
1文章
33瀏覽量
12363 -
UWB
+關(guān)注
關(guān)注
32文章
1109瀏覽量
61304 -
定位算法
+關(guān)注
關(guān)注
0文章
61瀏覽量
15025
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
UWB定位系統(tǒng)的定位原理和主要特點(diǎn)
UWB超寬帶室內(nèi)定位技術(shù)
基于UWB定位技術(shù)的定位系統(tǒng)
UWB定位技術(shù)之定位算法:RSS、AOA、TOA、TDOA
影響UWB定位技術(shù)精度的8個(gè)原因
影響UWB定位精度的8個(gè)主要的原因
影響UWB定位精度的8個(gè)主要的原因
影響UWB高精度室內(nèi)定位的7大因素
uwb定位管理系統(tǒng)的介紹
UWB室內(nèi)定位系統(tǒng)的三種定位算法_95power
UWB定位算法TDOA和TWR哪個(gè)更好,來做詳細(xì)對(duì)比
uwb無線定位系統(tǒng)的原理和介紹
UWB室內(nèi)定位系統(tǒng)TDOA算法方案介紹





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論