") KUKA機(jī)器人RESUME取消中斷事務(wù) V4.25
KUKA機(jī)器人RESUME取消中斷事務(wù) V4.25

?取消在本中斷程序的優(yōu)先級(jí)之下的中斷程序和子程序。
可能導(dǎo)致機(jī)器人的運(yùn)動(dòng)被終止
RESUME 指令只能在中斷程序中執(zhí)行
當(dāng) RESUME 生效時(shí),advancerun 指針不能在產(chǎn)生中斷的行,而是至少低一行。
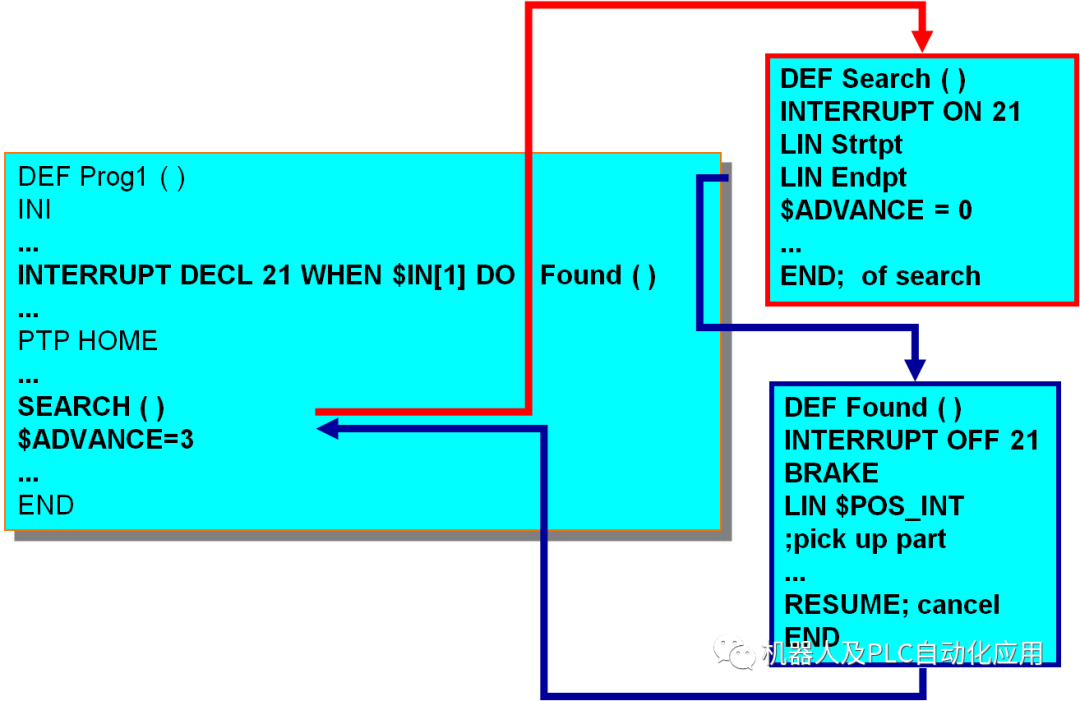
機(jī)器人運(yùn)動(dòng)期間,接近開(kāi)關(guān)發(fā)現(xiàn)到兩個(gè)目標(biāo)并且記錄了它們的位置,所以隨后機(jī)器人可以再移動(dòng)到該位置。
即使機(jī)器人已經(jīng)知道了兩個(gè)目標(biāo),機(jī)器人也會(huì)沿著全部的搜索軌跡移動(dòng)。為節(jié)約時(shí)間,一旦發(fā)現(xiàn)了零件的多數(shù)時(shí)應(yīng)立即結(jié)束移動(dòng)。
KRC.。.中機(jī)器人運(yùn)動(dòng)的取消是可能的,使用語(yǔ)句:
RESUME
RESUME可以取消當(dāng)前中斷被聲明的級(jí)別和以下級(jí)別的所有運(yùn)行的中斷程序和子程序。
同BRAKE語(yǔ)句,RESUME僅允許在中斷程序中使用。
當(dāng)激活RESUME語(yǔ)句時(shí),提前運(yùn)行指針千萬(wàn)不要在中斷被聲明的級(jí)別,至少應(yīng)低一個(gè)級(jí)別。
因?yàn)镽ESUME會(huì)取消搜索軌跡,所以在子程序中一定要編程搜索軌跡。在下面的例子中,
使用MOVEP()完成該操作;調(diào)用的中斷子程序是IR_PROG()。
在子程序的最后一行前使用RESUME語(yǔ)句停止提前運(yùn)行是重要的。只有這樣才可能確保當(dāng)RESUME語(yǔ)句被激活時(shí),提前運(yùn)行指針不在中斷被聲明的級(jí)別。在MOVEP()中,使用$ADVANCE=0分配提前運(yùn)行指針。
在中斷程序中,一旦輸入1的傳感器發(fā)現(xiàn)4個(gè)零件,使用BRAKE語(yǔ)句停止搜索軌跡,然后通過(guò)RESUME語(yǔ)句取消搜索(因?yàn)镸OVEP()也和IR_PROG()一起被結(jié)束)。不使用BRAKE 語(yǔ)句,在提前運(yùn)行中仍然執(zhí)行搜索運(yùn)動(dòng)。
RESUME語(yǔ)句后,主程序在子程序調(diào)用的指令后重新開(kāi)始。也就是說(shuō)$ADVANCE=3(復(fù)位提前運(yùn)行)。
DEF SEARCH()
;---------聲明部分---------
EXT BAS(BAS_COMMAND:IN,REAL:IN)
DECL AXIS HOME
;----------初始化----------
INTERRUPT DECL 3 WHEN $STOPMESS==TRUE DO IR_STOPM()
INTERRUPT ON3 ;標(biāo)準(zhǔn)缺省服務(wù)函數(shù)
BAS(#INITMOV,0) ;初始化速度;
;加速度,$BASE,$TOOL,等
HOME={AXIS:A1 0,A2 -90,A3 90,A4 0,A5 30,A6 0}
INTERRUPT DECL 11 WHEN $IN[1] DO IR_PROG()
I[1]=0 ;設(shè)置預(yù)定的計(jì)數(shù)器為0;
------------主程序部分 ----------
PTP HOME ;BCO運(yùn)行
INTERRUPT ON1 1
MOVEP() ;沿著搜索軌跡運(yùn)動(dòng)
$ADVANCE=3 ;復(fù)位提前運(yùn)行
INTERRUPT OFF 11
GRIP()
PTP HOME
END;
--------子程序-----------
DEF MOVEP() ;搜索軌跡運(yùn)動(dòng)的子程序
PTP{X 1232,Y -263,Z 1000,A 0,B 67,C -90}
LIN{X 1232,Y 608,Z 1000,A 0,B 67,C -90}
$ADVANCE=0 ;停止提前運(yùn)行
END ;
;------中斷程序--------
DEF IR_PROG() ;存儲(chǔ)零件的位置
;INTERRUPT OFF 11
I[1]=I[1]+1
POSITION[I[1]]=$POS_INT ;位置被存儲(chǔ)
IFI [1]==4 THEN ;4個(gè)零件被認(rèn)出
BRAKE ;運(yùn)動(dòng)被停止
RESUME ;IR_PROG&MOVE被取消
ENDIF
;INTERRUPT ON 11
END;
--------子程序------------
DEF GRIP() ;捉住被發(fā)現(xiàn)的零件
INTPOS_NO ;計(jì)數(shù)器變量
FOR POS_NR=I[1] TO 1 STEP-1 POSITION[POS_NR].Z=POSITION[POS_NR] .Z+200
LIN POSITION[POS_NR];移動(dòng)到零件以上200mm處
LIN_REL{Z-200} ;移動(dòng)到零件的垂直位置;拾起零件
LIN POSITION[POS_NR];移動(dòng)返回
LIN{X 634,Y 1085,Z 1147,A 49,B 67,C -90}
;設(shè)置零件向下
ENDFOR
END
如果由于傳感器的原因(“觸電跳動(dòng)”),會(huì)產(chǎn)生一個(gè)中斷被不正確地觸發(fā)兩次的危險(xiǎn),您可以通過(guò)在中斷程序的第一行關(guān)閉中斷的方法避免發(fā)生該危險(xiǎn)。但是這樣做,在中斷執(zhí)行期間發(fā)生的真正的中斷現(xiàn)在也不能被識(shí)別了。如果要保持中斷有效,必須在返回主程序前重新開(kāi)啟中斷。
如果使用RESUME語(yǔ)句取消了一個(gè)運(yùn)動(dòng),就像上面的例子一樣,那么后面的運(yùn)動(dòng)不要是CIRC運(yùn)動(dòng),因?yàn)槠瘘c(diǎn)每次都會(huì)不同(產(chǎn)生不同的圓)。
在例8.2編程的搜索動(dòng)作中,插補(bǔ)循環(huán)速率(當(dāng)前為12ms)輸入被削了頂,最大誤差約為軌跡速度的12ms倍數(shù)。
“快速測(cè)量”
如果要消除該誤差,您千萬(wàn)不要在用戶輸入上連接接近開(kāi)關(guān);而是應(yīng)該使用外圍設(shè)備插頭X11中的4個(gè)專門的輸入。這些輸入可以通過(guò)系統(tǒng)變量
$MEAS_PULSE[1]。..MEAS_PULSE[4]來(lái)尋址(響應(yīng)時(shí)間為125Us)。 當(dāng)中斷被打開(kāi)時(shí),千萬(wàn)不要使用測(cè)量脈沖,否則會(huì)產(chǎn)生相應(yīng)的錯(cuò)誤信息。
審核編輯 :李倩
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28618瀏覽量
207925 -
KUKA
+關(guān)注
關(guān)注
3文章
217瀏覽量
16582
原文標(biāo)題:KUKA機(jī)器人 RESUME 取消中斷事務(wù) V4.25
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
KUKA重型機(jī)器人
求KUKA機(jī)器人控制柜三維模型
KUKA機(jī)器人問(wèn)題解答
庫(kù)卡KUKA機(jī)器人四種啟動(dòng)方式介紹
KUKA庫(kù)卡機(jī)器人伺服驅(qū)動(dòng)器相關(guān)型號(hào)舉例
KUKA焊接機(jī)器人伺服電機(jī)常見(jiàn)故障及維修處理
工業(yè)機(jī)器人組成結(jié)構(gòu)相關(guān)資料分享
庫(kù)卡機(jī)器人MGV電源模塊維修
機(jī)器人系統(tǒng)與控制需求簡(jiǎn)介
KUKA機(jī)器人伺服驅(qū)動(dòng)模塊維修
沒(méi)有有前輩用LabVIEW控制kuka機(jī)器人c2的經(jīng)驗(yàn)?通訊是怎么做到的?
KUKA機(jī)器人相關(guān)分類及型號(hào)一覽
KUKA機(jī)器人 RESUME:中止中斷程序解讀
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無(wú)線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 社區(qū)
- 小組
- 論壇
- 問(wèn)答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開(kāi)發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論