") PID算法三個(gè)參數(shù)的控制作用
PID算法三個(gè)參數(shù)的控制作用
看起來PID高大尚,先被別人唬住,后被公式唬住,由于大多數(shù)人高數(shù)一點(diǎn)都不會(huì)或者遺忘,所以再一看公式,簡(jiǎn)直嚇?biāo)馈?/p>
直接從網(wǎng)上找了PID相關(guān)公式截圖如下。
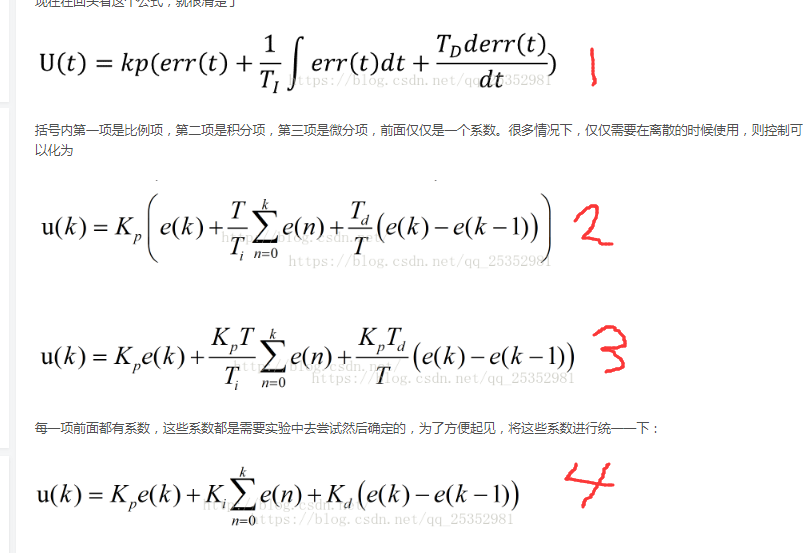
了解了很淺的原理后,結(jié)果公式看不懂,不懂含義,所以最終沒有透徹。我這里先對(duì)公式進(jìn)行剖析,公式理解明白了,結(jié)合網(wǎng)上的一些PID講述的例子,就明白了。
先對(duì)PID這三個(gè)系數(shù)的含義進(jìn)行簡(jiǎn)單掃盲。同時(shí)也防止自己遺忘。P是比例系數(shù),I是積分系數(shù)、D是微分系數(shù)。
下面對(duì)PID這三個(gè)系數(shù)進(jìn)行詳細(xì)說明:演示PID三個(gè)參數(shù)的控制作用。
▎比例系數(shù)P
比例系數(shù)P是干什么用,其實(shí)如果現(xiàn)在你是初中生的話,你一下子就懂了,比例系數(shù)就是用在穿過(0,0)這個(gè)坐標(biāo)點(diǎn)直線的放大倍數(shù)k,k越大,直線的斜率越大,所以是用在y = k * x中的,其中的k就是比例系數(shù)p,大家都簡(jiǎn)稱為kp,所以就變成了y = Kp * x。
x就是當(dāng)前值currentValue和目標(biāo)值totalValue的差值,簡(jiǎn)稱誤差err,則err = currentValue - totalValue。y就是執(zhí)行器對(duì)應(yīng)的輸出值U,所以執(zhí)行器對(duì)應(yīng)的輸出值U = Kp * ( currentValue - totalValue ) 。
所以,如果說是使用比例進(jìn)行調(diào)節(jié)。
則當(dāng)前第1次調(diào)節(jié)時(shí)執(zhí)行器對(duì)應(yīng)的輸出值為:
U1 = Kp * ( curentValue1 - totalValue1 )
第2次調(diào)節(jié)時(shí)執(zhí)行器對(duì)應(yīng)的輸出值為:
U2 = Kp * ( currentValue2 - totalValue2 )
這就是比例系數(shù)P的應(yīng)用,也就是大家說的比例調(diào)節(jié)。比例調(diào)節(jié)就是根據(jù)當(dāng)前的值與目標(biāo)值的差值,乘以了一個(gè)Kp的系數(shù),來得到一個(gè)輸出值,這輸出值直接影響了下次當(dāng)前值的變化。如果只有比例調(diào)節(jié)的話,系統(tǒng)會(huì)震蕩的比較厲害。比如你的汽車現(xiàn)在運(yùn)行的速度是60km/h,現(xiàn)在你想通過你的執(zhí)行器去控制這個(gè)汽車達(dá)到恒定的50km/h,如果你只用kp進(jìn)行比例調(diào)節(jié)話。U = Kp * ( 60 - 50 ),假設(shè)Kp取值為1,此時(shí)得到U執(zhí)行器的輸出值是10,結(jié)果當(dāng)你執(zhí)行器輸出后,發(fā)現(xiàn)汽車一下變成了35Km/h,此時(shí)U2 = Kp * (35 - 50),此時(shí)得到U執(zhí)行器的輸出值是-15,結(jié)果當(dāng)你執(zhí)行器輸出后,發(fā)現(xiàn)汽車變成了55Km/h,由于慣性和不可預(yù)知的誤差因素,你的汽車始終無法達(dá)到恒定的50km/h。始終在晃動(dòng),相信如果你在車上,你一定吐的很厲害。所以光有比例系數(shù)進(jìn)行調(diào)節(jié),在有些場(chǎng)合是沒有辦法將系統(tǒng)調(diào)穩(wěn)定的。所以可以為了減緩震蕩的厲害,則會(huì)結(jié)合使用比例P和微分D。
▎微分系數(shù)D
微分,實(shí)際上是對(duì)誤差進(jìn)行微分。加入誤差1是err(1)。誤差2是err(2)。則誤差err的微分是 (err2 - err1)。乘上微分系數(shù)D,大家叫做KD,則當(dāng)執(zhí)行器第1次調(diào)節(jié)后有了第1次的誤差,第2次調(diào)節(jié)后有了第2次的誤差,則結(jié)合P系數(shù)。就有了PD結(jié)合,根據(jù)每次調(diào)節(jié)時(shí),誤差的值的經(jīng)驗(yàn)推算,你就能選取出D的系數(shù)。假如誤差是越來越小的,那么微分后肯定是一個(gè)負(fù)值。負(fù)值在乘以了一個(gè)D系數(shù) 加上了比例調(diào)節(jié)的值后肯定值要比單純使用比例調(diào)節(jié)的值要小,所以就啟到了阻尼的作用。有了阻尼的作用就會(huì)使得系統(tǒng)區(qū)域穩(wěn)定。
PD結(jié)合的公式經(jīng)過上面的分析后為:
U(t) = Kp * err(t) + Kd * derr(t)/dt
▎積分系數(shù)I
積分,實(shí)際上是對(duì)誤差的積分,也就是誤差的無限和。如何理解積分系數(shù)I,這里引用網(wǎng)上的例子
以熱水為例。假如有個(gè)人把我們的加熱裝置帶到了非常冷的地方,開始燒水了。需要燒到50℃。
在P的作用下,水溫慢慢升高。直到升高到45℃時(shí),他發(fā)現(xiàn)了一個(gè)不好的事情:天氣太冷,水散熱的速度,和P控制的加熱的速度相等了。
這可怎么辦?
P兄這樣想:我和目標(biāo)已經(jīng)很近了,只需要輕輕加熱就可以了。
D兄這樣想:加熱和散熱相等,溫度沒有波動(dòng),我好像不用調(diào)整什么。
于是,水溫永遠(yuǎn)地停留在45℃,永遠(yuǎn)到不了50℃。
根據(jù)常識(shí),我們知道,應(yīng)該進(jìn)一步增加加熱的功率。可是增加多少該如何計(jì)算呢?
前輩科學(xué)家們想到的方法是真的巧妙。
設(shè)置一個(gè)積分量。只要偏差存在,就不斷地對(duì)偏差進(jìn)行積分(累加),并反應(yīng)在調(diào)節(jié)力度上。
這樣一來,即使45℃和50℃相差不太大,但是隨著時(shí)間的推移,只要沒達(dá)到目標(biāo)溫度,這個(gè)積分量就不斷增加。系統(tǒng)就會(huì)慢慢意識(shí)到:還沒有到達(dá)目標(biāo)溫度,該增加功率啦!
到了目標(biāo)溫度后,假設(shè)溫度沒有波動(dòng),積分值就不會(huì)再變動(dòng)。這時(shí),加熱功率仍然等于散熱功率。但是,溫度是穩(wěn)穩(wěn)的50℃。
kI的值越大,積分時(shí)乘的系數(shù)就越大,積分效果越明顯。
所以,I的作用就是,減小靜態(tài)情況下的誤差,讓受控物理量盡可能接近目標(biāo)值。
I在使用時(shí)還有個(gè)問題:需要設(shè)定積分限制。防止在剛開始加熱時(shí),就把積分量積得太大,難以控制。
編輯:黃飛
-
PID
+關(guān)注
關(guān)注
35文章
1473瀏覽量
85705 -
執(zhí)行器
+關(guān)注
關(guān)注
5文章
378瀏覽量
19390
原文標(biāo)題:這才是理解PID算法的正確姿勢(shì)!
文章出處:【微信號(hào):mcu168,微信公眾號(hào):硬件攻城獅】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
pid控制中三個(gè)參數(shù)的作用







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論