") 深度解讀!?VSLAM與VIO的3D建圖,重定位與世界觀綜述
深度解讀!?VSLAM與VIO的3D建圖,重定位與世界觀綜述
本文重點(diǎn)描述VSLAM與VIO的3D建圖,重定位,回環(huán)與世界觀,從小伙伴們最關(guān)心的工程和商用搞錢(qián)的角度進(jìn)行詳細(xì)分析,并從技術(shù)和實(shí)現(xiàn)部分詳細(xì)描述各種類(lèi)型SLAM在這塊的差異。
首先來(lái)4個(gè)基礎(chǔ)邏輯:
SLAM本質(zhì)是數(shù)學(xué)問(wèn)題,是一個(gè)科學(xué)家與工程師可以控制的數(shù)學(xué)問(wèn)題,本質(zhì)不是玄學(xué),實(shí)現(xiàn)需要大量的數(shù)學(xué)知識(shí)與工具,需要極強(qiáng)的代碼功底與硬軟件開(kāi)發(fā)能力。
無(wú)論對(duì)SLAM系統(tǒng)如何分割,建圖仍是位姿估計(jì)的副產(chǎn)品。
當(dāng)下SLAM主流落地就兩類(lèi):二維三維導(dǎo)航建圖與具體操作(如抓取)
無(wú)論任何SLAM系統(tǒng),精度無(wú)論多高,本質(zhì)都是求解非線性?xún)?yōu)化的最優(yōu)解,勢(shì)必存在誤差,且隨時(shí)長(zhǎng)與探索距離遞增。
三相性:開(kāi)銷(xiāo)/魯棒性/精度已經(jīng)反復(fù)提過(guò)了,這個(gè)部分我們也實(shí)現(xiàn)了,本文的重點(diǎn)在于描述VIO/VSLAM的世界觀。
01
主流SLAM相關(guān)工作分類(lèi)
首先,稀疏點(diǎn)云不是世界觀,即使稀疏點(diǎn)云有完整而正確的深度,也是難以被直觀理解的機(jī)器語(yǔ)言,這塊在學(xué)界和業(yè)界都得到了反復(fù)的驗(yàn)證,目前先對(duì)所有SLAM系統(tǒng)做一個(gè)基本的分類(lèi),(二維單點(diǎn)激光SLAM與矢量重定位不放在里面,是原點(diǎn)和古早的系統(tǒng)類(lèi)別):
(1) 以VINS,ORB3為代表的間接法(或特征點(diǎn)法)構(gòu)建的系統(tǒng),或LSD-SLAM與SD-VIS這一類(lèi)并不直接的直接法
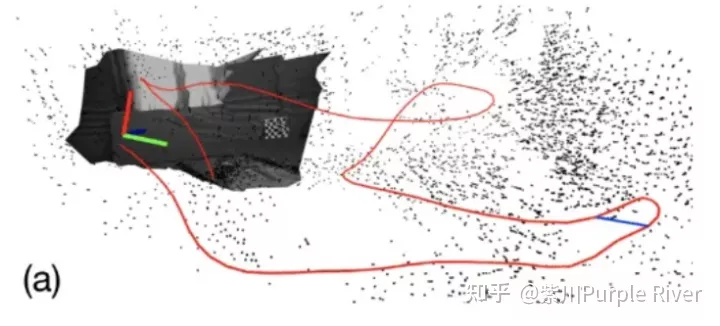
如上圖所示,從非常直觀的感受就能感覺(jué)到,這種稀疏的點(diǎn)云,即使構(gòu)建了完整和正確的深度,也是不容易被直觀理解的機(jī)器語(yǔ)言,相對(duì)的商業(yè)價(jià)值貌似較低。其實(shí)這種認(rèn)知是不完善的,后續(xù)會(huì)進(jìn)行詳述。
(2)線掃/固態(tài)激光SLAM
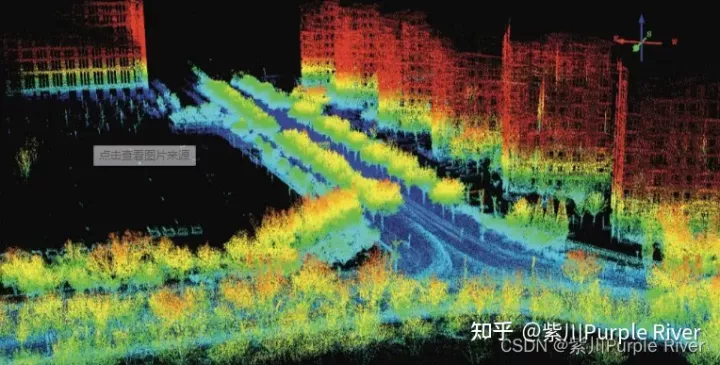
線掃或者固態(tài)激光生成的點(diǎn)云相對(duì)稠密,距離和范圍較大,而且可以建立世界觀相對(duì)本端的誤差較小的深度,也是最容易理解的,廣泛應(yīng)用于汽車(chē)與自動(dòng)駕駛行業(yè),還有一定的缺陷是沒(méi)有更加稠密和豐富的紋理(類(lèi)似真實(shí)世界)。
這一類(lèi)激光SLAM大多數(shù)由多種(4-5種)傳感器的融合卡爾曼濾波構(gòu)成:IEKF或MSCKF,然后對(duì)點(diǎn)云進(jìn)行如ICP類(lèi)型的暴力匹配,目前并行化的工作也做得相當(dāng)好了,從業(yè)人員很多。問(wèn)題在于當(dāng)下最主流的L4級(jí)自動(dòng)駕駛本身是一個(gè)非常卷的領(lǐng)域,并慢慢開(kāi)始走向了2個(gè)路徑:1是本端基礎(chǔ)感知+AI目標(biāo)分類(lèi)結(jié)合HD高精地圖(HD地圖目前也是一個(gè)很卷的東西(類(lèi)似以前網(wǎng)吧接AI公司的單做標(biāo)注),2是具有極強(qiáng)感知能力的本地多傳感器融合融態(tài)結(jié)合簡(jiǎn)單的地圖,但是路徑2雖然厲害但是當(dāng)前無(wú)論是芯片各種U上的算力還是算法本身,都離真正的商用有距離(同時(shí)路徑1和2都有非常麻煩的法律法規(guī)問(wèn)題)。接下來(lái)幾年這塊正在走向L2變?yōu)橹鳈C(jī)廠的系統(tǒng)支撐方,也許只有等到未來(lái)的某一天某篇真正劃時(shí)代的論文之后,才能迎來(lái)真正的大批量落地。
(3)緊耦合同步優(yōu)化直接法-DSO系,注意此處的緊耦合并不意指不同傳感器間的緊耦合,任何信息,包括同類(lèi)傳感器間的信息同樣是可以被耦合的,整個(gè)處理流和pipeline也是可以被緊耦合的。
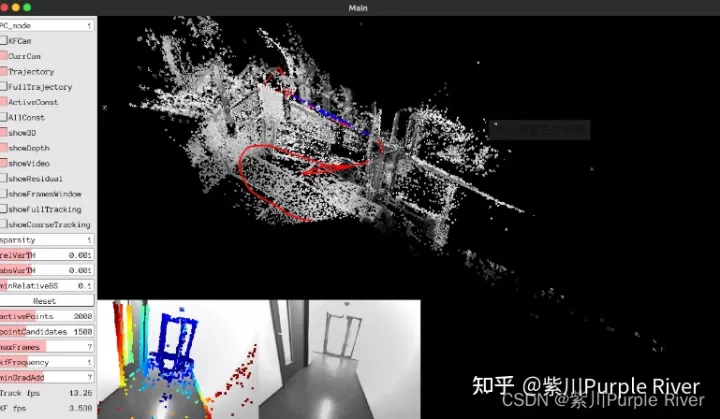
效果如上圖所示
這塊學(xué)術(shù)上帶頭的是我很喜歡和尊敬的Daniel Cremer教授(TUM),他的思維是用純視覺(jué)完成整個(gè)世界觀的構(gòu)建,甚至在未來(lái)大面積的去替換雷達(dá)。
這條路徑的基礎(chǔ)特點(diǎn)是用視覺(jué)構(gòu)建了半稀疏的世界觀,而且隨著算力的提升,點(diǎn)云的密度可以進(jìn)一步的增加以形成實(shí)際的半稠密世界觀,是一條非常棒的路徑。但是這條路徑問(wèn)題也非常多,最核心的一點(diǎn)是三相性中的開(kāi)銷(xiāo)度,其次是視覺(jué)世界觀相當(dāng)于雷達(dá)的深度信息仍有一些明顯的缺陷,再次是和IMU等運(yùn)動(dòng)類(lèi)傳感器緊耦合難以實(shí)施,后續(xù)進(jìn)行詳述。
02
相關(guān)工作與評(píng)估 (不懂可跳):
(1) 三相性VIO系統(tǒng)研究與試驗(yàn)發(fā)展:
2021年至2022年中, 紫川組主要針對(duì)(1)完成了三相性相關(guān)工作,實(shí)現(xiàn)了viobot完整的軟硬件閉環(huán),實(shí)現(xiàn)了獨(dú)立編解碼與OSD疊點(diǎn),開(kāi)發(fā)了獨(dú)立的UI與三維空間規(guī)劃底,通過(guò)CPU+GPU+DSP完成了整個(gè)系統(tǒng)前端/后端與回環(huán)的并行化(其實(shí)回環(huán)并沒(méi)有真正并行化只是做了SIMD),完成了完整SDK,并針對(duì)在各種真實(shí)環(huán)境中的極端情況設(shè)計(jì)了對(duì)應(yīng)的ZUPT策略,輸出了VIO/VINS工程問(wèn)題定位的思路與流程。以上各項(xiàng)工作在前文中都已經(jīng)詳述。最近一些收尾工作是雙目初始化的升級(jí)和環(huán)點(diǎn)SDK。2022年中至2023年6月重點(diǎn)完成VIO系統(tǒng)的世界觀,主要難點(diǎn)在數(shù)據(jù)結(jié)構(gòu),每天不是整WARP原語(yǔ)就是各種亂七八糟的CELL和樹(shù)結(jié)構(gòu)。在之前這一系列工作中,首先感謝港科VINS組,尤其是基于四元數(shù)的預(yù)積分的編寫(xiě)工作,后續(xù)大家的一些工作可以用GTSAM,但是用這個(gè)去處理預(yù)積分其實(shí)在工程側(cè)是不友好的,還是重了。
針對(duì)(1),目前其實(shí)可用性是很高的,這個(gè)和大家對(duì)于稀疏點(diǎn)云的通常直觀理解還是會(huì)有一些差異。相關(guān)工作先重點(diǎn)描述這個(gè):詞袋看起來(lái)貌似是一門(mén)玄學(xué),其實(shí)它存儲(chǔ)了優(yōu)化之后在空間中的相機(jī)位置與姿態(tài),以及它在當(dāng)時(shí)所對(duì)應(yīng)的點(diǎn)的x,y坐標(biāo)與深度信息(但是數(shù)量很少很稀疏比如200個(gè),多了算不過(guò)來(lái))。最終你存的那張圖其實(shí)是沒(méi)啥用的,形成的數(shù)據(jù)結(jié)構(gòu)是一整個(gè)用二進(jìn)制表述的關(guān)鍵字和描述符,同時(shí)詞袋字典是用很基本的k-d樹(shù)形式訓(xùn)練與存儲(chǔ),所以它其實(shí)一點(diǎn)都不玄學(xué),而是一門(mén)真正的顯學(xué)。在機(jī)器語(yǔ)言中系統(tǒng)是很容易完成這個(gè)工作流的,同時(shí)對(duì)準(zhǔn)確率及召回率來(lái)說(shuō),所有的VSLAM系統(tǒng)和VIO系統(tǒng)在商用時(shí)一定要有更高的準(zhǔn)確率!這塊照做即可。
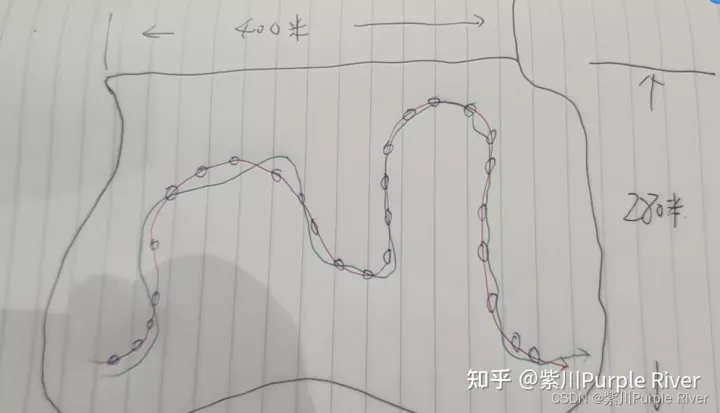
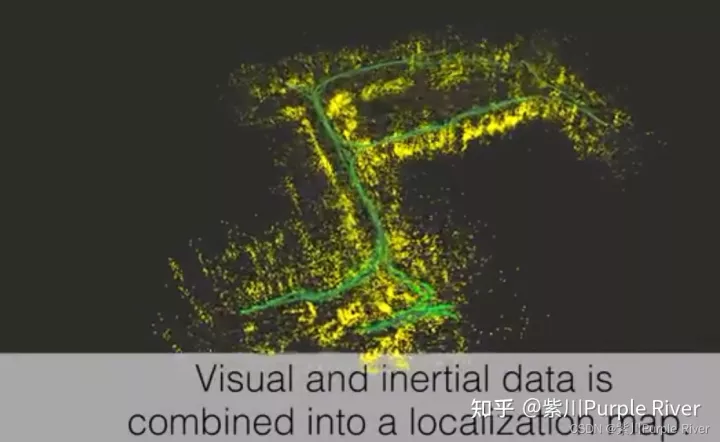
首先你把這玩意當(dāng)成三維空間,紅色代表地面真實(shí)GT(也不要糾結(jié)哪來(lái)的,你當(dāng)我外感信標(biāo)或者RTK大概標(biāo)的),藍(lán)色的各種不確定小橢球你就可以當(dāng)成詞袋回環(huán)每一次定位的范圍了。綠色的線代表重復(fù)作業(yè)軌跡,在這個(gè)二次和多次機(jī)器人作業(yè)的過(guò)程中,所復(fù)用的位置姿態(tài),即藍(lán)色不確定橢球給予的引導(dǎo)。同時(shí)這是一個(gè)標(biāo)準(zhǔn)3D-2D的PNP過(guò)程,進(jìn)入回算之后給出的位姿也是相對(duì)世界坐標(biāo)系原點(diǎn)的位姿。
缺點(diǎn)是雖然詞袋重定位及回環(huán)是一門(mén)顯學(xué),但是畢竟它是一個(gè)二進(jìn)制的綜合描述,也來(lái)源于二維圖像中的特征點(diǎn)與描述子(如ORB),它給人整體的感覺(jué)肯定是遠(yuǎn)遠(yuǎn)不如三維點(diǎn)云的,而且對(duì)作業(yè)重定位觀測(cè)方向也會(huì)有要求。也不像真正的二維重定位如Catagrapher這類(lèi)系統(tǒng)中開(kāi)發(fā)的二維邊界矢量重定位清晰。但是實(shí)際它是好用的,即使環(huán)境中出現(xiàn)了一些小的移動(dòng)目標(biāo)物,也不會(huì)對(duì)整個(gè)詞袋的特性造成太大的破壞,仍然可以友好的重定位與回環(huán)。但當(dāng)然當(dāng)所取用的環(huán)點(diǎn)中如果有30-40%以上都改變了,肯定也是難以回環(huán)的(這種難以回環(huán)和重定位反而是正確的結(jié)果)
回到摘要中的基礎(chǔ)邏輯4,任何SLAM的優(yōu)化,勢(shì)必產(chǎn)生誤差,VIO只是提供了更好的魯棒性也是目前世界上性?xún)r(jià)比最好的傳感器組合(前提是解決三相性,否則算力平臺(tái)成本驚人),而這種誤差,必須通過(guò)重定位手段解決,才能更新更準(zhǔn)確的位姿和世界觀(建圖)
實(shí)現(xiàn)的效果就是類(lèi)似TANGO的這個(gè)簡(jiǎn)單清晰的小視頻了【Visual-inertial teach and repeat powered by Google Tango】
https://www.bilibili.com/video/BV1tP4y1d7AX/share_source=copy_web&vd_source=3cba44a8cb771560d536cc3085033dfe,但是要注意,無(wú)論如何,(1)這種系統(tǒng)的世界觀都是相當(dāng)糟糕的!

TANGO完成位姿計(jì)算并記錄工作點(diǎn)(重定位環(huán)點(diǎn))
稀疏的MAPPING

UAV完成作業(yè)及重定位拍攝。
其實(shí)(1)還有一個(gè)很大的問(wèn)題,雖然它是一套很好的導(dǎo)航與重定位系統(tǒng),但是它仍然難以用來(lái)實(shí)現(xiàn)SLAM基礎(chǔ)邏輯3中的具體操作行為,比如抓取一個(gè)水杯,打開(kāi)一扇門(mén)等,因?yàn)槭紫人氖澜缬^是稀疏的。當(dāng)然到這里有同學(xué)會(huì)問(wèn)了,那我再加上一個(gè)面陣i-tof相機(jī)呢?其實(shí)我想說(shuō)這個(gè)也是難以實(shí)現(xiàn)的,因?yàn)槟壳白詈糜玫腣IO(如我們組的系統(tǒng),哈哈)其實(shí)誤差大約也是在0.5-0.8%,而很多具體操作要求的精度是cm級(jí)別的。實(shí)現(xiàn)這種耦合的最好設(shè)計(jì)是:先使用VIO導(dǎo)航定位到附近,如數(shù)十cm內(nèi),再啟動(dòng)另外一套工作邏輯(如AI的類(lèi)識(shí)別結(jié)合i-TOF相機(jī))結(jié)合機(jī)械臂完成接下來(lái)的工作。目前導(dǎo)航+操作類(lèi)的大量行為還是更多的依賴(lài)外感信標(biāo)。
(2) 激光雷達(dá)SLAM系統(tǒng)簡(jiǎn)述:
激光雷達(dá)最大的優(yōu)點(diǎn)就是有完全可控的深度,用非常弱智的方式算回來(lái),線束越多,建圖越清晰。
真的是簡(jiǎn)述,幾個(gè)問(wèn)題,首先雷達(dá)太貴了。
其次雷達(dá)在非常近距離的具體操作實(shí)施上一樣是有問(wèn)題的,誤差并不小,特別近和特別遠(yuǎn)都有問(wèn)題。
最后一個(gè)問(wèn)題是先算位姿再進(jìn)行ICP等暴力匹配的方式太浪費(fèi)開(kāi)銷(xiāo),無(wú)論怎么優(yōu)化數(shù)據(jù)結(jié)構(gòu),八叉樹(shù)/K-D/BBST,結(jié)果都類(lèi)似,除非降幀降頻或者大量降低最后模型的精度(比如八叉樹(shù)最后搞成一坨坨的),那這不就走回頭路了嗎。。。當(dāng)然現(xiàn)在也有很多更好的方式提高雷達(dá)的工作效率和開(kāi)銷(xiāo)比,但是很多都需要基于GPU和NPU等矩陣乘法器,極大的提升了門(mén)檻,幾乎完全就是給車(chē)載平臺(tái)弄的,仍然不利于行業(yè)的進(jìn)步和業(yè)務(wù)的普及!
(3) 緊耦合連貫優(yōu)化的直接法/ DSO-直接稀疏里程計(jì)
這個(gè)部分后續(xù)我準(zhǔn)備專(zhuān)門(mén)針對(duì)性的寫(xiě)個(gè)純技術(shù)的課題,春節(jié)后應(yīng)該還要發(fā)布DM-VIO的全解和pipeline。因此這篇文章還是寫(xiě)粗一些。但是要注意,這個(gè)部分即使寫(xiě)粗,對(duì)于一些基礎(chǔ)稍微弱一些的朋友,還是非常吃力的。
其實(shí)首先我一直對(duì)Daniel老師這個(gè)命名感覺(jué)到奇怪。。。為啥叫這個(gè),其實(shí)明明挺稠密的或者說(shuō)可以做到很稠密,嘿嘿。
TUM的這套方法和路徑是目前能實(shí)現(xiàn)視覺(jué)世界觀的主流方法,但是有一系列非常麻煩的先決條件,首先就是對(duì)光度標(biāo)定的要求非常高,另外對(duì)卷簾快門(mén)非常不友好(雖然已經(jīng)提供了優(yōu)化方法),另外也沒(méi)有過(guò)多考慮自動(dòng)增益等現(xiàn)代相機(jī)帶來(lái)的影響,但是瑕不掩瑜,這套方法在我的心目中,還是非常重要的,雖然它真的非常地難。。。
DSO的靈魂是:光度不變假設(shè)
他的學(xué)生Jacob Engel在2016-2017年就整個(gè)完成了DSO這套系統(tǒng)并開(kāi)源,寫(xiě)得。。。怎么說(shuō)呢,一言難盡,其實(shí)就是寫(xiě)得非常好,但是對(duì)普通工程師過(guò)于不友好,導(dǎo)致了后續(xù)這個(gè)方向一直沒(méi)有得到太多的發(fā)展,但是本身也是因?yàn)樗倪@一整套理論實(shí)施落地的難度。。。
DSO詳解高翔博士在知乎做過(guò),另外東北大學(xué)的高手龔亦群同學(xué)做了整個(gè)代碼的詳解,我們?cè)谒@個(gè)海量工作的基礎(chǔ)上重新梳理了一下因子圖。所以我在這里就不多貼式子了,講核心重點(diǎn)!
DSO是基于優(yōu)化的,H矩陣形態(tài)很好理解,每個(gè)位姿8維,在6個(gè)自由度上增加了2個(gè)關(guān)鍵的光度參數(shù)a,b。最核心的3個(gè)殘差同時(shí)包含了:幾何/光度與圖像梯度,對(duì)應(yīng)3個(gè)Jacobian。
這3個(gè)殘差的優(yōu)化就是絕大部分同學(xué)難以上手的核心原因,另一個(gè)核心原因是其極其麻煩的初始化。整個(gè)DSO絕對(duì)不是大家簡(jiǎn)單認(rèn)為的順序操作:比如先前端提取,然后跟蹤,然后匹配,然后RANSAC,然后BA或者卡爾曼優(yōu)化這類(lèi),而是整個(gè)工作流都在不斷地重復(fù)交叉優(yōu)化這3種殘差同時(shí)不斷地更新整個(gè)Hession矩陣的過(guò)程。
FRAME/POINT與Residual與對(duì)應(yīng)的能量EF全部互持指針,整個(gè)工作流耦合度極高,但注意因果關(guān)系!正是這種非常精美的模型,才能實(shí)現(xiàn)最終DSO所實(shí)現(xiàn)的真正相對(duì)稠密的視覺(jué)世界觀。
DSO系統(tǒng)解耦的難度極大,最好的方法就是重寫(xiě),另外后續(xù)地平線的工作組和涂大神也手寫(xiě)了2個(gè)雙目的立體S-DSO, 問(wèn)題仍然有不少但是已經(jīng)收斂了很多。后人也在不斷地推進(jìn)相關(guān)工作。
DSO系最大的問(wèn)題就是如果要建立更好的視覺(jué)世界觀,其開(kāi)銷(xiāo)會(huì)幾何級(jí)數(shù)增長(zhǎng),同時(shí)因?yàn)檫\(yùn)算涉及到太多的交叉優(yōu)化與迭代(矩陣的處理和常規(guī)差不多),很難ASIC化。同時(shí)因?yàn)轳詈隙群芨撸\(yùn)動(dòng)傳感器也很難并入,如VI-DSO和DM-VIO并入了IMU,代碼也是很難的。同時(shí)DM-VIO雖然運(yùn)行效果很好,但是開(kāi)銷(xiāo)更高了(直接2個(gè)BA+延遲邊緣化在跑,視覺(jué)緊耦,運(yùn)動(dòng)傳感器接近松耦,雖然也不是很松)。
視覺(jué)世界觀如果真正建立,我們的重定位便不再依賴(lài)詞袋這類(lèi)東西,同時(shí)回環(huán)也會(huì)變得沒(méi)那么重點(diǎn),我們將有更多方法匹配慣性系與世界系,因?yàn)槲覀兊玫降膮⒄諗?shù)據(jù)將變得更加直觀。
但是事情也不要太理想化,視覺(jué)世界觀畢竟還是來(lái)自于雙眼,和雷達(dá)世界觀比仍然有不少的缺陷:如大樹(shù)在陽(yáng)光下的影子,一面墻它只是個(gè)矩形但到底是否可以通過(guò)呢?這一系列的問(wèn)題。
審核編輯 :李倩
-
SLAM
+關(guān)注
關(guān)注
23文章
426瀏覽量
31900 -
VIO
+關(guān)注
關(guān)注
0文章
11瀏覽量
10174 -
VSLAM
+關(guān)注
關(guān)注
0文章
23瀏覽量
4334
原文標(biāo)題:深度解讀!?VSLAM與VIO的3D建圖,重定位與世界觀綜述
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
解讀3D打印 打造科技生活新世界
肇觀電子發(fā)布世界領(lǐng)先AI視覺(jué)處理芯片N171
3D TOF深度剖析
全球3D芯片及模組引領(lǐng)者,強(qiáng)勢(shì)登陸中國(guó)市場(chǎng)
MASTERIMAGE 3D公司向世界展示強(qiáng)大的3D立體技術(shù)
3D電視顯示技術(shù)綜述
解讀裸眼3D技術(shù)
微軟眼中的AI世界觀 AI指引未來(lái)世界將走向何方
曠視科技聯(lián)合業(yè)內(nèi)企業(yè)共研3D視覺(jué) 探索世界的深度
NVIDIATITANXPascal評(píng)測(cè) 重新刷新我們對(duì)TITANX的世界觀
關(guān)于3D視覺(jué)定位技術(shù)詳細(xì)解析

深度剖析3D視覺(jué)定位技術(shù)

一種降低VIO/VSLAM系統(tǒng)漂移的新方法

3D深度感測(cè)的原理和使用二極管激光來(lái)實(shí)現(xiàn)深度感測(cè)的優(yōu)勢(shì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論