

本文提出了一種新方法,通過使用點(diǎn)到平面匹配將VIO/VSLAM系統(tǒng)生成的稀疏3D點(diǎn)云與數(shù)字孿生體進(jìn)行對(duì)齊,從而實(shí)現(xiàn)精確且全球一致的定位,無需視覺數(shù)據(jù)關(guān)聯(lián)。所提方法為VIO/VSLAM系統(tǒng)提供了緊密集成的6自由度全局測(cè)量。在高保真GPS模擬器上進(jìn)行的實(shí)驗(yàn)以及從無人機(jī)收集的真實(shí)世界數(shù)據(jù)表明,我們的方法優(yōu)于最先進(jìn)的VIO-GPS系統(tǒng),并且與最先進(jìn)的視覺SLAM系統(tǒng)相比,在應(yīng)對(duì)視點(diǎn)變化方面具有更出色的魯棒性。
01 本文核心內(nèi)容
在復(fù)雜環(huán)境中實(shí)現(xiàn)精確且全球一致的位姿估計(jì)對(duì)于諸如自動(dòng)駕駛車輛和無人機(jī)之類的自主系統(tǒng),以及視障人士的輔助技術(shù)而言,是一項(xiàng)關(guān)鍵需求。相機(jī)和慣性測(cè)量單元(IMU)通常被用于解決位姿估計(jì)問題,這得益于它們成本低、設(shè)計(jì)輕巧以及具有互補(bǔ)的測(cè)量能力——相機(jī)能提供豐富但數(shù)據(jù)率低且依賴于環(huán)境的數(shù)據(jù),而IMU可提供高數(shù)據(jù)率、低維度且不受環(huán)境影響的數(shù)據(jù)。視覺慣性里程計(jì)(VIO)和視覺SLAM算法融合相機(jī)和IMU的測(cè)量結(jié)果,并在局部坐標(biāo)系中輸出位姿估計(jì)值。局部坐標(biāo)系通常在算法初始化時(shí)被設(shè)定為單位位姿。由于相機(jī)和IMU提供的是局部測(cè)量,加之存在噪聲和建模簡(jiǎn)化,這些算法會(huì)隨時(shí)間累積漂移。
為了在全局固定坐標(biāo)系(例如,東-北-上(ENU)參考坐標(biāo)系)中獲取位姿估計(jì)值并減少漂移,會(huì)在位姿估計(jì)過程中納入全局測(cè)量。最常使用的全局測(cè)量是GPS。然而,GPS測(cè)量在室內(nèi)無法獲取,在城市峽谷等區(qū)域通常存在噪聲且不可靠,因?yàn)樵谶@些地方信號(hào)反射和阻塞現(xiàn)象很常見。結(jié)果,GPS測(cè)量有時(shí)可能比VIO/VSLAM系統(tǒng)自身生成的位姿估計(jì)更不確定。
VSLAM系統(tǒng)通過使用視覺測(cè)量結(jié)果將自身定位到預(yù)先構(gòu)建的地圖來補(bǔ)償漂移。定位問題通過匹配當(dāng)前相機(jī)視圖和地圖之間的視覺特征來解決。標(biāo)準(zhǔn)技術(shù)會(huì)匹配特征描述符。而較新的研究工作則用神經(jīng)網(wǎng)絡(luò)替代了特征描述符。無論采用何種匹配技術(shù),所有基于視覺的定位方法都依賴于當(dāng)前相機(jī)視圖與參考地圖中視圖的相似性,這在許多情況下限制了它們的有效性,例如將無人機(jī)拍攝的航拍圖像定位到白天和夜間由地面車輛記錄的地圖上,或者將基于其他光譜相機(jī)(例如紅外相機(jī))的VIO/VSLAM系統(tǒng)定位到由標(biāo)準(zhǔn)相機(jī)記錄的地圖上。
盡管在VIO-GPS算法和視覺定位技術(shù)方面有了不少進(jìn)展,但現(xiàn)有的方法仍難以完全應(yīng)對(duì)在城市環(huán)境中實(shí)現(xiàn)全球一致、低漂移位姿估計(jì)的挑戰(zhàn),這是由于它們所依賴的全局測(cè)量存在固有的噪聲、稀疏性或視點(diǎn)依賴性。
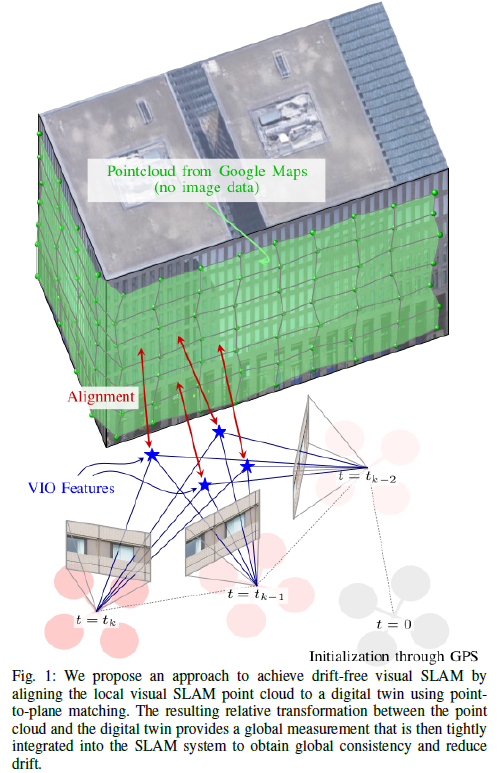
為應(yīng)對(duì)這些挑戰(zhàn),我們提議使用幾何信息(例如3D點(diǎn)云、網(wǎng)格)來定位數(shù)字孿生體。特別地,我們引入了一種新穎的方法,將VIO/VSLAM系統(tǒng)生成的局部地圖(稀疏3D點(diǎn)云)定位到幾何數(shù)字孿生體上。我們的方法使用局部VIO/VSLAM點(diǎn)云與數(shù)字孿生體的網(wǎng)格表示進(jìn)行點(diǎn)到平面的匹配,提供了一個(gè)緊密融合到VIO/VSLAM系統(tǒng)中的新的全局測(cè)量。
我們的實(shí)驗(yàn)在我們?cè)谠擁?xiàng)目背景下開發(fā)的高保真GPS模擬器以及使用在城市中飛行的無人機(jī)進(jìn)行的真實(shí)世界測(cè)試中,均證明了所提出方法優(yōu)于當(dāng)前最先進(jìn)的VIO-GPS方法。結(jié)果表明,與基于特征描述符匹配的傳統(tǒng)視覺定位技術(shù)相比,我們的方法不僅能更有效地減少漂移,而且在視點(diǎn)變化時(shí)具有更強(qiáng)的魯棒性。
02 主要貢獻(xiàn)
本工作的主要貢獻(xiàn)為:
? 一種新穎的算法,其通過點(diǎn)到平面匹配將局部且稀疏的VSLAM3D點(diǎn)云定位到數(shù)字孿生體,因而獨(dú)立于視覺匹配。
? 在VSLAM系統(tǒng)中緊密融合此類定位測(cè)量,以在城市環(huán)境中達(dá)成全球一致、低漂移的位姿估計(jì)。
? 在使用新型高保真GPS模擬器和在城市中飛行的無人機(jī)所采集的真實(shí)世界數(shù)據(jù)的模擬實(shí)驗(yàn)中,我們展示了我們的方法相對(duì)于最先進(jìn)的VIO-GPS系統(tǒng)的優(yōu)勢(shì)。
?我們表明,所提出的局部-全局地圖定位比基于圖像特征描述符匹配的最先進(jìn)視覺定位技術(shù)更穩(wěn)健。
03 方法架構(gòu)
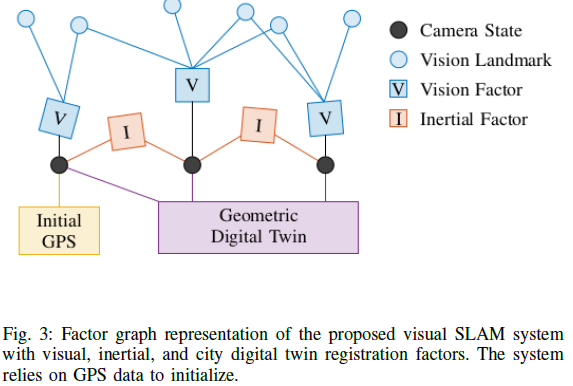
我們提出了一種VSLAM系統(tǒng),其借助場(chǎng)景幾何結(jié)構(gòu)將自身定位于數(shù)字孿生體,從而在城市環(huán)境中達(dá)成低漂移且全局一致的姿態(tài)估計(jì)。此定位問題被構(gòu)建為點(diǎn)云配準(zhǔn)問題,可通過點(diǎn)到平面的ICP算法高效解決。具體而言,我們通過將VSLAM系統(tǒng)生成的局部稀疏3D點(diǎn)云與城市數(shù)字孿生體進(jìn)行配準(zhǔn),獲取全局測(cè)量值。接著,在VSLAM姿態(tài)估計(jì)過程中,此全局測(cè)量值與當(dāng)前相機(jī)和IMU測(cè)量值緊密耦合。另外,我們提出一種算法,能自適應(yīng)地找出用于在VSLAM中融合全局測(cè)量值的權(quán)重。這種自適應(yīng)加權(quán)解決方案使我們能夠考慮到配準(zhǔn)問題的不確定解,這些解源自退化情況且取決于場(chǎng)景幾何結(jié)構(gòu)。
04 實(shí)驗(yàn)
為了評(píng)估我們方法的有效性,我們?cè)谀M環(huán)境和真實(shí)世界環(huán)境中均開展了實(shí)驗(yàn)。我們將我們的方法與四個(gè)基準(zhǔn)方法進(jìn)行了對(duì)比。為了將我們的方法與整合GPS數(shù)據(jù)的VIO系統(tǒng)作比較,我們選取VINS-Fusion和SVO-GPS作為基準(zhǔn)。VINS-Fusion將VIO與GPS測(cè)量值松散耦合。相反,SVO-GPS在VIO滑動(dòng)窗口優(yōu)化中緊密耦合GPS測(cè)量值。為了將我們的方法與基于視覺特征匹配來實(shí)現(xiàn)閉環(huán)的SLAM系統(tǒng)進(jìn)行對(duì)比,我們選擇SVO-LoopClosure和ORB-SLAM3。SVO-LoopClosure與我們的系統(tǒng)采用相同的VIO管道。ORB-SLAM3是一個(gè)通過匹配ORB特征來執(zhí)行閉環(huán)的視覺SLAM系統(tǒng)。
A.模擬結(jié)果
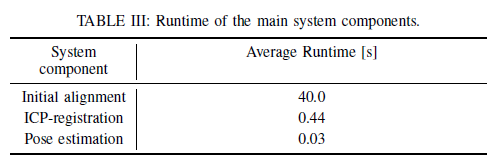
我們的系統(tǒng)SVO-DigitalTwin以及基線所實(shí)現(xiàn)的絕對(duì)軌跡誤差在表I中報(bào)告。估計(jì)的軌跡與真實(shí)軌跡一起繪制在圖4中。SVO-DigitalTwin在位置和旋轉(zhuǎn)方面實(shí)現(xiàn)了最佳的絕對(duì)軌跡誤差,優(yōu)勢(shì)顯著。具體而言,相對(duì)于表現(xiàn)最佳的基線,ATEp和ATER分別提高了31%和27%。
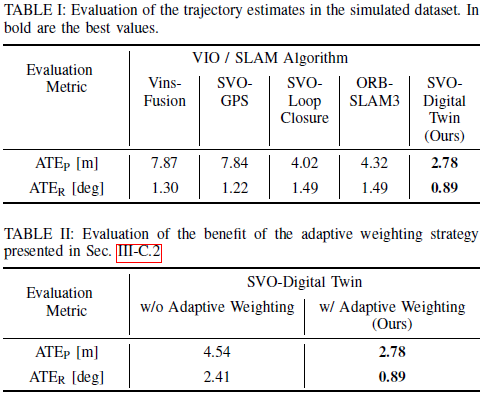
我們?cè)诒鞩I中納入了一項(xiàng)消融研究,以驗(yàn)證我們的自適應(yīng)加權(quán)策略。改進(jìn)后的ATE誤差驗(yàn)證了所提出的自適應(yīng)加權(quán)策略的益處。
我們?cè)诒鞩II中列出了主要系統(tǒng)組件的運(yùn)行時(shí)間。我們?yōu)槌跏紝?duì)齊步驟設(shè)定了一個(gè)時(shí)間長(zhǎng)度。在這段時(shí)間過后,我們檢查是否滿足收斂標(biāo)準(zhǔn)(見第III-D節(jié))。如果滿足,則認(rèn)為對(duì)齊成功。如果不滿足,我們會(huì)積累更多的GPS測(cè)量值,直到滿足該標(biāo)準(zhǔn)。姿態(tài)估計(jì)的運(yùn)行時(shí)間是從圖像捕獲到估計(jì)出該圖像的相機(jī)姿態(tài)所經(jīng)過的時(shí)間。
B.真實(shí)世界實(shí)驗(yàn)
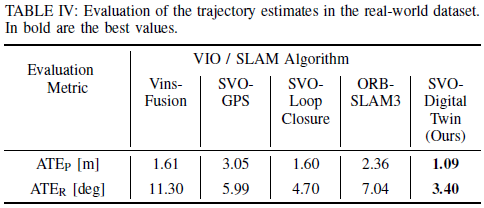
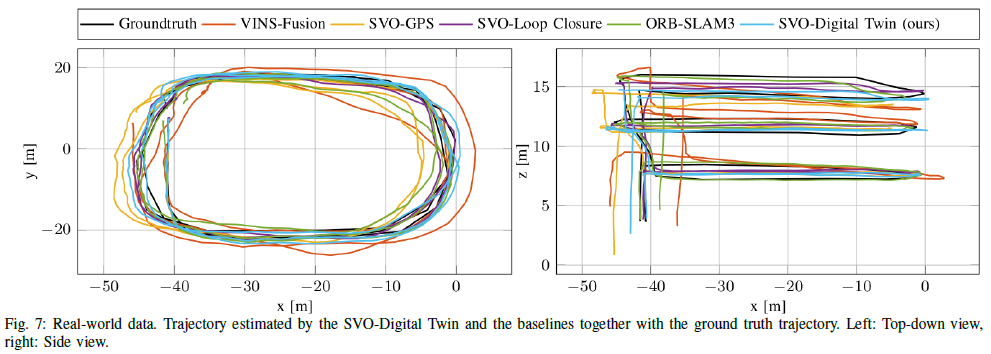
我們的系統(tǒng)SVO-DigitalTwin以及基線所產(chǎn)生的絕對(duì)軌跡誤差在表IV中報(bào)告。估計(jì)軌跡與真實(shí)軌跡一同繪制在圖7中。SVO-DigitalTwin在位置和旋轉(zhuǎn)方面大幅實(shí)現(xiàn)了最佳的絕對(duì)軌跡誤差。具體而言,相對(duì)于表現(xiàn)最佳的基線,ATEp和ATER分別提高了32%和28%。由于SVO-GPS將GPS與視覺和慣性數(shù)據(jù)緊密耦合,GPS測(cè)量的高度不確定性,其性能有所下降。
此外,我們針對(duì)提出的幀對(duì)齊策略,評(píng)估了其與將VSLAM姿態(tài)估計(jì)與基于世界坐標(biāo)系的參考地面真值姿態(tài)進(jìn)行對(duì)齊的效果。我們的對(duì)齊策略實(shí)現(xiàn)了0.50米的平移誤差和0.79度的航向誤差。否則,在我們的對(duì)齊策略中僅使用GPS測(cè)量將導(dǎo)致8.11米的平移誤差和6.77度的航向誤差。
05 總結(jié)
綜上所述,本文提出了一種通過利用數(shù)字孿生體的幾何信息來降低VIO/VSLAM系統(tǒng)漂移的新方法。通過引入一種通過點(diǎn)到平面匹配將VIO/VSLAM生成的點(diǎn)云定位到城市數(shù)字孿生體的方法,我們解決了依賴GPS或視覺定位技術(shù)的方法所存在的局限性。我們?cè)诟弑U鍳PS模擬器和真實(shí)世界的無人機(jī)飛行進(jìn)行的實(shí)驗(yàn)中,均展示了該方法相較于現(xiàn)有系統(tǒng)的優(yōu)越性,特別是在減少漂移和處理視點(diǎn)變化方面。(想要了解更多文章細(xì)節(jié)的讀者,可以閱讀一下論文原文~)
-
SLAM
+關(guān)注
關(guān)注
23文章
430瀏覽量
32155 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14066瀏覽量
168314 -
數(shù)字孿生
+關(guān)注
關(guān)注
4文章
1398瀏覽量
12611
原文標(biāo)題:超越VIO–GPS!應(yīng)對(duì)復(fù)雜環(huán)境的Digital Twins無漂移視覺SLAM
文章出處:【微信號(hào):gh_c87a2bc99401,微信公眾號(hào):INDEMIND】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
矢量混頻器表征和混頻器測(cè)試系統(tǒng)矢量誤差修正的新方法 白皮書
一種求解非線性約束優(yōu)化全局最優(yōu)的新方法
一種估計(jì)小電流系統(tǒng)線路對(duì)地電容的新方法

一種改善三相不平衡下逆變器并網(wǎng)系統(tǒng)電能質(zhì)量的新方法
一種級(jí)數(shù)混合運(yùn)算產(chǎn)生SPWM波新方法
一種求解動(dòng)態(tài)及不確定性優(yōu)化問題的新方法

一種復(fù)制和粘貼URL的新方法
一種改善微波模塊增益指標(biāo)溫度特性的新方法

一種產(chǎn)生激光脈沖的新方法
一種產(chǎn)生激光脈沖新方法
一種無透鏡成像的新方法





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論