 電機和電機驅動基礎 -總結-
電機和電機驅動基礎 -總結-
歷經大約兩年半的時間,共發布47篇文章的Tech Web Motor基礎知識“電機驅動基礎篇”將在本文告一段落。作為整體的總結,本文匯總了每篇文章的鏈接及其關鍵要點,供大家參考。
電機和電機驅動概述
電機驅動器所要求的四大要點
關鍵要點
全世界對電機的需求呈現強勁增長趨勢。
高效率的電機驅動和控制方法對于解決世界能源問題來說非常重要。
電機驅動器要求的四大要點:“高可靠性”、“低功耗、高效率”、“靜音、低振動”、“控制、便利性”
電機的種類與分類
關鍵要點
關于電機的種類,分類方法有很多種。
從使用電機的角度看,可根據能量轉換介質、電源、結構、特性等進行分類。
小型電機的結構
關鍵要點
電機的基本組成部件主要為線圈、永久磁鐵和轉子。
根據電機種類,又分為線圈固定型和磁鐵固定型電機。
各領域的電機驅動系統概述
關鍵要點
電機驅動系統因領域和應用產品而異。
應用產品和要求內容不同,所適合的電機和驅動/控制方法也各不相同。
電機的旋轉原理和發電原理
電機的旋轉原理
關鍵要點
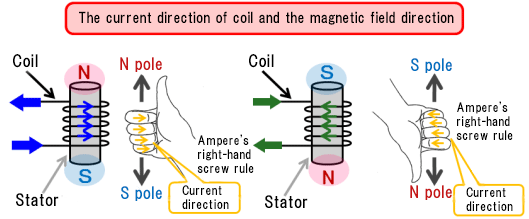
電機的旋轉原理遵循電流、磁場和力相關的定律(法則)。
電機的發電原理
關鍵要點
電機的發電作用與旋轉動作一樣,遵循電流、磁場和力的定律(法則)。
有刷DC電機
有刷電機的結構
關鍵要點
顧名思義,有刷電機中存在被稱為“電刷”的電極。
電機由定子和轉子組成,定子包括磁體,轉子包括線圈和換向器。
旋轉原理
關鍵要點
有刷電機是線圈由于電刷和換向器的連接狀態、電流和磁場的產生、以及固定磁體和線圈外側的極性關系而沿相同方向持續運動,從而使轉子旋轉的。
發電原理
關鍵要點
通過線圈在磁場中旋轉來發電,并在電機引腳中產生直流電壓。
短路制動
關鍵要點
通過使電機引腳短路,可以產生相反方向的旋轉力,并且可以獲得使旋轉停止的制動效果。
有刷直流電機的特性
關鍵要點
當施加轉矩時,轉速會以恒定值下降。
當提高電源電壓時,轉速會上升。
當施加轉矩時,電機電流會以恒定值增加。
最大轉矩時=轉速為零時=電機電流最大。
使用H橋電路驅動有刷直流電機:原理
關鍵要點
H橋電路是用來改變電機連接狀態的電路。
使用4個開關(晶體管)進行4種連接狀態的切換。
有刷直流電機的實際驅動電路由H橋電路和電壓控制電路組合構成。
通過H橋電路驅動有刷直流電機:輸出狀態的切換
關鍵要點
可以通過2位邏輯來實現H橋四種連接狀態的切換。
除H橋和控制邏輯電路外,許多實際的有刷直流電機驅動IC還具有電平轉換和同時導通防止功能。
通過H橋電路驅動有刷直流電機:高邊電壓線性控制
關鍵要點
可以線性控制H橋電路高邊電壓的電路結構。
通過控制輸出引腳的H電壓,可以線性控制電機轉速和轉矩。
使用BTL放大器電路驅動有刷直流電機:線性電壓驅動
關鍵要點
將BTL放大器應用于電機驅動的有刷直流電機線性電壓驅動示例。
使用了BTL放大器的有刷直流電機驅動分為電壓驅動和電流驅動兩種。
使用BTL放大器電路驅動有刷直流電機:線性電流驅動
關鍵要點
將BTL放大器應用于電機驅動的有刷直流電機線性電流驅動示例。
使用了BTL放大器的有刷直流電機驅動分為電壓驅動和電流驅動兩種。
使用PWM輸出方式驅動有刷直流電機:PWM驅動的原理
關鍵要點
有刷直流電機的PWM驅動會反復施加電壓和電流再生動作。
有多種使用H橋進行電流再生的方法。
使用PWM輸出方式驅動有刷直流電機:PWM驅動時的電流再生方法
關鍵要點
有刷直流電機的PWM驅動會反復施加電壓和電流再生動作。
使用H橋的電流再生方法有多種,再生電流路徑不同損耗也不同。
使用PWM輸出方式驅動有刷直流電機:損耗和注意事項
關鍵要點
關于有刷直流電機的PWM驅動損耗,可以從施加電壓時、電流再生時和轉換時三個狀態來考慮。
如果提高開關速度(轉換速率),效率會提高,但噪聲會增加。
當提高PWM頻率時,可以減少電流紋波,但效率會降低。
使用PWM輸出方式驅動有刷直流電機:H橋電路PWM驅動
關鍵要點
支持PWM驅動的H橋有刷直流電機驅動器IC有幾種類型。
可以直接將PWM信號輸入至IN1/IN2的類型。
配有由Vref引腳、三角波發生器及比較器組成的PWM信號生成電路的類型。
使用PWM輸出方式驅動有刷直流電機:H橋恒流驅動
關鍵要點
H橋PWM恒流驅動的一種方法是使用電流檢測電阻檢測電機電流,并通過比較器將其與基準電壓進行比較的PWM控制方法。
由于電流檢測電阻中會產生較大的電流變化,因此可能會產生噪聲電壓并引發誤動作。
有一種通過設置消隱時間來抑制誤動作的方法。
使用PWM輸出方式驅動有刷直流電機:BTL放大器輸入形式驅動
關鍵要點
使用BTL放大器輸入形式的H橋PWM驅動中,利用VIN的電壓差來控制占空比。
如果有防止同時導通的電路,當占空比為0%或100%左右時,可能無法保持線性控制。
另外還應注意,第一級放大器、三角波振蕩器和比較器均具有偏移量變化,因此占空比相對于輸入電壓存在偏差。
單開關電路驅動、半橋電路驅動
關鍵要點
單開關電路驅動通過一個開關控制旋轉和空轉兩種狀態。
在單開關電路驅動中將功率晶體管用作開關時,由于晶體管可能會因反電動勢而受損,故需要使用鉗位二極管。
半橋電路可以控制旋轉、空轉和制動三種狀態。
當使用MOSFET作為開關時,半橋電路可以通過MOSFET的寄生二極管實現制動動作。單開關電路和半橋電路均適用PWM驅動和電流驅動。
有刷直流電機的驅動電路總結
步進電機的結構
關鍵要點
步進電機是一種可以與脈沖信號同步準確地控制旋轉角度和轉速的電機,也稱為“脈沖電機”。
步進電機的基本結構是線圈固定、永磁體可以旋轉的結構。
步進電機的基本工作原理
關鍵要點
在兩相雙極步進電機中,按順序逐相進行線圈勵磁會使電機旋轉。
按相反的順序勵磁可以使電機反向旋轉。
步進電機:微步驅動原理
關鍵要點
步進電機可以通過微步驅動來實現更精細的步距角控制。
微步驅動的優點是可以進行微小角度的位置控制,并且可以減少低速范圍的振動和噪聲。
步進電機的基本特性
關鍵要點
“牽入轉矩特性”也稱為“啟動轉矩特性”,表示可以使停止狀態的電機啟動的頻率(脈沖頻率)與負載轉矩之間的關系。
牽入轉矩曲線內的區域稱為“自啟動區域”,是可以啟動、停止和反轉的區域。
將負載轉矩為零的頻率=可以啟動電機的極限頻率稱為“最大自啟動頻率”。
“失步轉矩特性”也稱為“連續特性”或“牽出轉矩特性”,表示在自啟動后增加負載轉矩時可以繼續旋轉的頻率,其值高于牽入轉矩特性的值。
電機可以連續運行的極限稱為“最大連續運行頻率”。
牽入轉矩特性和失步轉矩特性都是負載轉矩會隨著脈沖頻率的增加而降低。
保持轉矩是在通電狀態下在電機停止時即使施加外力,電機也試圖保持停止位置的力。
步進電機的牽入轉矩特性和失步轉矩特性會因勵磁方法和驅動電路而異。
混合式步進電機的結構和工作原理
關鍵要點
混合式步進電機是兼具VR型和PM型電機優點的步進電機。
混合式步進電機使用VR型結構來實現精細的步距角,并且可以通過與永磁體相結合來增加轉矩。
步進電機通過切換兩對線圈的通電狀態(4步),可以使轉子旋轉一個齒距。
步進電機的驅動:雙極連接和單極連接
關鍵要點
雙極連接
采用電流在一個繞組中雙向流動的驅動方式(雙極驅動)。
結構簡單,但驅動電路復雜。
繞組利用率好,且可以進行精細的控制,因此能夠獲得很高的輸出轉矩。
可以減小在線圈中產生的反電動勢,因此可以使用耐壓低的電機驅動器。
單極連接
具有中心抽頭,采用電流在一個繞組中始終沿固定方向流動的驅動方式(單極驅動)。
結構復雜,但驅動電路簡單。
繞組利用率差,與雙極連接相比,只能獲得約一半的輸出轉矩。
由于會在線圈中產生較高的反電動勢,因此需要使用高耐壓的電機驅動器。
兩相雙極步進電機的驅動其1
關鍵要點
可使用雙通道的H橋驅動電路來驅動兩相雙極步進電機。
兩相雙極步進電機驅動的電流再生模式包括Slow Decay、Fast Decay及Mix Decay。
兩相雙極步進電機的驅動其2
關鍵要點
在兩相雙極步進電機的驅動中,與Fast Decay相比,Slow Decay的電流紋波更小,因此噪聲更小,平均電流更大,故可以獲得更大的轉矩。但是,在高脈沖頻率情況下表現不佳。
在兩相雙極步進電機的驅動中,與Slow Decay相反,Fast Decay在噪聲和轉矩方面雖然表現遜色,但在高脈沖頻率方面則更具優勢。
在兩相雙極步進電機的驅動中,Mix Decay可以結合Slow Decay和Fast Decay的優點來優化波形。
兩相單極步進電機的驅動
關鍵要點
與兩相雙極步進電機的驅動電路相比,兩相單極步進電機的驅動電路在輸入段配置、內部邏輯及控制電路和驅動電路使用雙通道方面基本相同,但是輸出段的配置不同。
兩相雙極步進電機使用雙通道H橋來驅動,而兩相單極步進電機則使用雙通道的2個開關(MOSFET)來驅動。
在輸出關斷的瞬間,會產生瞬態電壓,并且由于結構上的原因,變壓器耦合會產生(2×VM)以上的電壓,因此需要注意驅動器的耐壓。
步進電機總結
三相無刷電機
三相全波無刷電機的結構
關鍵要點
三相無刷電機的線圈被固定在電路板上,并纏繞在鐵芯上。
線圈固定,永磁體(轉子)旋轉。
可使用霍爾元件來檢測轉子(磁體)的位置。
三相全波無刷電機的旋轉原理
關鍵要點
通過三個線圈的電流流入和流出使磁場發生變化,從而使轉子旋轉。
三相全波無刷電機的位置檢測
關鍵要點
三相全波無刷電機的位置檢測方法有兩種:使用霍爾元件的方法和不使用霍爾元件而使用電機線圈的感應電壓的方法。
三相全波無刷電機的驅動:有傳感器、120度激勵線性電流驅動
關鍵要點
120度激勵驅動是各相位差120度、并反復進行“120度導通(H)、60度關斷、120度導通(L)、60度關斷”的循環來實現驅動的。
三相全波無刷電機的驅動:有傳感器、正弦波PWM驅動
關鍵要點
正弦波激勵驅動是各相位差為120度的正弦波驅動。
正弦波驅動由于不會像120度激勵驅動那樣產生尖峰噪聲而在噪聲方面更具優勢。
通過PWM驅動實現高效率。
三相全波無刷電機的驅動:超前角控制
關鍵要點
當磁鐵磁場的相位比繞組磁場的相位滯后90 度時,可以獲得電機的最大轉矩。
當相感應電壓的相位與相電流的相位相同時,即滿足上述條件,從而可獲得最大轉矩。
然而,如果在與相感應電壓相同的相位施加電壓,則相電流會出現相位滯后并產生負轉矩。
超前控制是一種通過使相施加電壓的相位超前以使相電流的相位與相感應電壓的相位匹配的方法。
三相全波無刷電機的驅動:如何使施加于電機的電壓更大
關鍵要點
在三相全波無刷電機的正弦波驅動中,如果只是單純的正弦波驅動,那么施加于電機的電壓只有電源電壓的0.87倍。
可以使施加于電機的電壓更大的手法有兩種:
將正弦波下方圓弧的一半分別加到其他兩相上方進行驅動。
將三次諧波加到基波(正弦波)上。
三相全波無刷電機的驅動:無傳感器120度驅動
關鍵要點
在無傳感器驅動中,有一種使用線圈的感應電壓代替霍爾元件來檢測電機位置的方法。
該方法利用了三個線圈中點處的信號CT。
通過捕獲該CT信號和A1、A2、A3信號并輸入驅動電路,并由比較器進行比較,來生成各輸出。
這種無傳感器驅動方式與有傳感器驅動基本相同,不同之處在于該方式使用感應電壓。
無傳感器120度驅動的啟動方法一:通過檢測同步運行時的感應電壓來啟動
關鍵要點
要啟動三相全波無刷電機無傳感器120度驅動時,由于停止時的永磁體位置未知而需要采用以下方法:
①通過檢測同步運行時的感應電壓來啟動
②通過檢測永磁體停止位置來啟動
方法①是無論永磁體的位置如何,都在旋轉方向上形成合成磁場,通過在一定時間內進行切換,使永磁體開始旋轉,從而產生的感應電壓,檢測到該感應電壓并將其應用到正常控制中。
這種啟動方法存在以下問題:
由于生成合成磁場時不考慮永磁體的位置,因此在某些狀態下,可能會施加反向轉矩,在某些永磁體停止位置,啟動時需要時間。
本來,產生足夠轉矩的永磁體與合成磁場的位置關系是90度,但由于生產合成磁場時不考慮永磁體的位置,所以會從比如70度或60度等角度開始,所以無法獲得固定的較大啟動轉矩。
作為對策,可以采取方法②。
無傳感器120度驅動的啟動方法二:通過檢測永磁體停止位置來啟動
關鍵要點
“通過檢測永磁體停止位置來啟動的方法”可以避免“通過檢測同步運行時的感應電壓來啟動的方法”所存在的課題——反轉和低轉矩啟動,并改善了啟動時間較長的問題。
要檢測永磁體的停止位置,需要在電機不旋轉的短時間內進行6種模式的通電,并確認最大(或最小)電源電流的模式。
總結:三相全波無刷電機的特征與用途
關鍵要點
三相全波無刷電機最大的優點是沒有電刷,因此電氣噪聲和機械噪聲很小,可靠性高,壽命長。
三相全波無刷電機的缺點是整流功能需要復雜的電子電路和傳感器,成本更高。
小型電機的選型方法
小型電機的特點、性能、特性比較
關鍵要點
可以將小型電機的特點、性能、特性比較結果用作電機選型時的參考。
同一類別的電機中又包括多種規格,因此小型電機的特點、性能、特性比較結果僅用作參考。
最終還是需要通過各電機的技術規格書來確認詳細信息。
電機驅動器IC的絕對最大額定值
電機規格與電機驅動器IC絕對最大額定值之間的關系
關鍵要點
半導體元器件的絕對最大額定值的術語定義,遵循“JIS C 7032 晶體管通則”中的術語定義。
絕對最大額定值的定義是“即使一瞬間也不可超過的極限值,是不允許任何兩個項目同時達到的極限值”。
進行電機驅動器IC選型時,基本上要根據電機規格和使用條件來選擇滿足要求的驅動器IC。
如果超過絕對最大額定值,可能會導致驅動器IC的特性惡化、壽命縮短、甚至會損壞IC。
即使在絕對最大額定值范圍內,使用環境條件越嚴苛,驅動器IC的可靠性越低。
審核編輯黃宇
-
驅動器
+關注
關注
53文章
8267瀏覽量
146800 -
電機
+關注
關注
142文章
9072瀏覽量
146080 -
電機驅動
+關注
關注
60文章
1223瀏覽量
86858
發布評論請先 登錄
相關推薦
FOC電機驅動技術解析 FOC電機使用注意事項
如何選擇合適的電機驅動芯片

電機驅動電路工作應用原理是什么?簡單介紹
小驅動帶大電機會有什么問題
PWM驅動電機發熱的原因
無刷電機的驅動原理 直流有刷電機和無刷電機的差異
為什么步進電機要加驅動器
國產電機驅動芯片助力智能門鎖電機驅動領域






 工商網監
工商網監
評論