 縮短積分時間提高航位推算導航系統的精度
縮短積分時間提高航位推算導航系統的精度
汽車航位推算 (DR) 導航系統使用陀螺儀(陀螺儀)來估計車輛的瞬時航向。這些信息與行駛距離相結合,使導航系統能夠正確確定車輛的位置,即使在擁擠的市區或隧道中衛星信號被阻擋時也是如此。在DR導航中使用陀螺儀的一個主要挑戰是衛星信號可能會長時間丟失,導致累積的角度誤差變得太大而無法準確定位車輛。本文提供了一種解決此問題的簡單方法。
災難恢復導航的工作原理
DR導航的基本操作如圖1所示。陀螺儀以度/秒為單位測量車輛的旋轉速率。代表車輛瞬時航向的角度是通過對隨時間變化的旋轉速率進行積分來計算的。結合航向和行駛距離可以確定車輛的位置,如紅線所示。

圖1.災難恢復導航的工作原理。
使用數字陀螺儀,積分速率可以表示為速率樣本的總和乘以采樣間隔:
其中ri 是陀螺儀感應的速率,n 是樣本數,τ 是采樣間隔。
隨時間累積的角度誤差可以表示為:
其中ei是每個樣本的速率誤差,n 是樣本數,τ 是采樣間隔。
根據公式,隨著所需積分時間的延長,累積誤差也越大,如圖2所示。這些速率樣本使用帶有高性能角速率傳感器ADXRS810的評估板進行測量,模擬DR導航系統,記錄了3300個總速率樣本。藍線顯示陀螺儀速率樣本;紅線顯示累積的角度誤差。很明顯,累積的角度誤差隨著時間的推移而增加。

圖2.使用ADXRS810評估板測量的速率。(注意:角度誤差不是按比例計算的。
使用低通濾波器 (LPF) 縮短積分時間
減少角度誤差的傳統方法側重于最小化en,但今天的數字陀螺儀已經具有非常低的速率誤差規格。例如,ADXRS810具有80 LSB/°/sec的靈敏度、±2°/sec的偏移和0.03°/sec/g的抗沖擊性,改進空間有限。此外,該算法補償en很復雜。例如,與電子穩定控制(ESC)等其他應用相比,DR導航系統中的陀螺儀可以長時間運行,例如當車輛通過長隧道時GPS信號丟失時。在DR導航應用中,運行時間越長,累積的角度誤差越大。
如果積分時間可以減少,它將顯著減少累積的角度誤差。當陀螺儀不旋轉時,由于陀螺儀噪聲,速率輸出很小,但非零。ADXRS810實現了極低的陀螺儀噪聲和極高的靈敏度,只需設置適當的閾值即可輕松濾除數字域中的噪聲。這個過程等效于低通濾波,因為陀螺儀速率噪聲與旋轉引起的速率輸出相比處于高頻。
圖3顯示了圖2的LPF版本,其中所有小于1°/s的速率樣本都歸零,因此在進行速率積分時被忽略。剩余的積分時間,被認為是有效的積分時間,僅占總積分時間的16%左右。這大大減少了集成時間。因此,累積的角度誤差也顯著降低,如紅線所示。

圖3.使用ADXRS810評估板和數字LPF測量速率。(注意:角度誤差不是按比例計算的。
在實際應用中,車輛方向盤通常定位為零度。因此,陀螺儀速率的有效積分時間可以通過忽略它來減少,就像在圖3中描述的實驗中所做的那樣。圖4顯示了實際車載測試的陀螺儀速率樣本。通過隧道大約 180 秒,需要 180 秒才能進行速率積分。如果沒有LPF過程,超過180秒的累積誤差可能高達4°,這太大了,無法正確確定車輛在隧道中的位置。通過實施閾值為0.5°/秒的LPF工藝,有效積分時間縮短至僅84秒,減少了約53%。累積誤差降至約0.5°,如圖5所示。可以設置 LPF 閾值以達到特定應用所需的精度。

圖4.未經過濾的車載陀螺儀速率樣本。(注意:角度誤差不是按比例計算的。

圖5.LPF后的車載陀螺儀速率樣本。(注意:角度誤差不是按比例計算的。
結論
當今的數字陀螺儀具有出色的規格,因此提高性能的空間非常有限。在車輛DR導航系統和其他需要較長積分時間的應用中,設置LPF閾值以減少積分時間是提高精度的簡單但有效的方法。
ADXRS810高性能、低成本數字陀螺儀采用ADI公司創新的MEMS技術,是車輛DR導航應用的理想選擇。該器件采用非常小的封裝,提供低失調、低噪聲和高速率靈敏度。片內溫度補償,無需外部溫度傳感器,簡化了溫度補償算法。其對沖擊和振動的高抗擾度在汽車應用中非常重要。
-
傳感器
+關注
關注
2552文章
51366瀏覽量
755730 -
濾波器
+關注
關注
161文章
7858瀏覽量
178668 -
陀螺儀
+關注
關注
44文章
791瀏覽量
98876
發布評論請先 登錄
相關推薦
航位推算,實現高精度車載導航定位
縮短積分時間可以提高航位推算導航系統的精度
縮短積分時間可以提高航位推算導航系統的精度
導航定位技術分類
捷聯慣導_航位推算組合導航算法研究
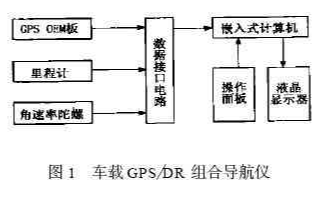
車載GPS/DR組合導航系統硬件設計

DSP與FPGA結合的車載GPS/DR組合導航系統硬件系統設計分析


提高航位推算導航系統的精度可以用低通濾波器(LPF)縮短積分時間

解析CEVA高精度航位推算軟件MotionEngine? Scout,簡化設計步驟
CEVA發布室內機器人導航系統高精度航位推算軟件解決方案
基于GPS和航位推算技術實現組合導航系統的應用方案





 工商網監
工商網監
評論