 中斷的基本概念及應用
中斷的基本概念及應用
1. 概述
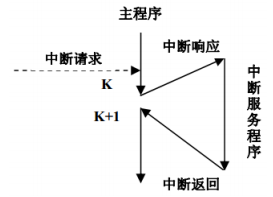
中斷是指MCU在運行過程中,出現某些意外情況需處理時,MCU能自動停止正在運行的程序并轉入處理新情況的程序,處理完畢后又返回原被暫停的程序繼續運行。中斷提供了應用程序與現實世界中發生的事情之間的接口。例如,我們可以使用中斷來捕獲觸發的按鈕、看門狗喂狗操作或計算發生的時間等。
當中斷發生時,處理器通常查看內存中的一個預先定義好的位置,稱為中斷向量。向量通常包含相關中斷處理程序的地址,而包含應用程序中所有向量的內存塊稱為中斷向量表。
2. 基本概念
2.1 中斷的分類
中斷可按優先級劃分為單級中斷與多級中斷,也可按OS是否參與處理將中斷分為一類與二類中斷:
2.1.1 單級與多級中斷
單級:即所有的中斷處于同一優先級,這也就意味著當一個中斷正在執行時,其他中斷必須排隊等待直到當前中斷處理完成。
多級:類似于Task中斷也區分不同的優先級,低優先級的中斷可以被高優先級的中斷搶占。
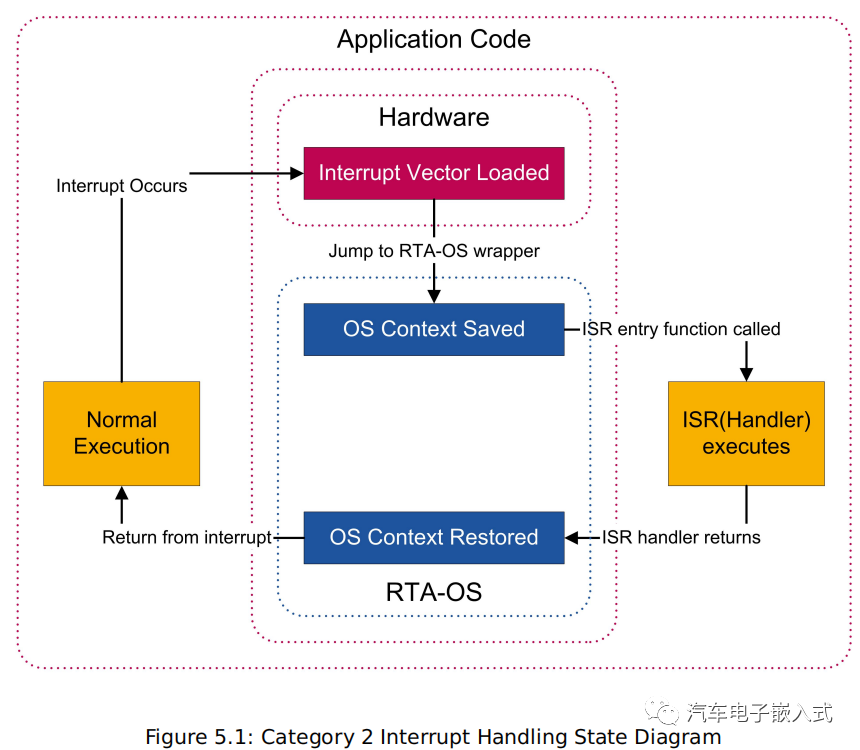
2.1.2 一類與二類中斷
一類中斷:不與OS進行交互,是優先級最高的中斷,需要用戶正確的配置硬件、編寫處理程序并從中斷中返回,用不好的話出錯概率高,一般應用較少。
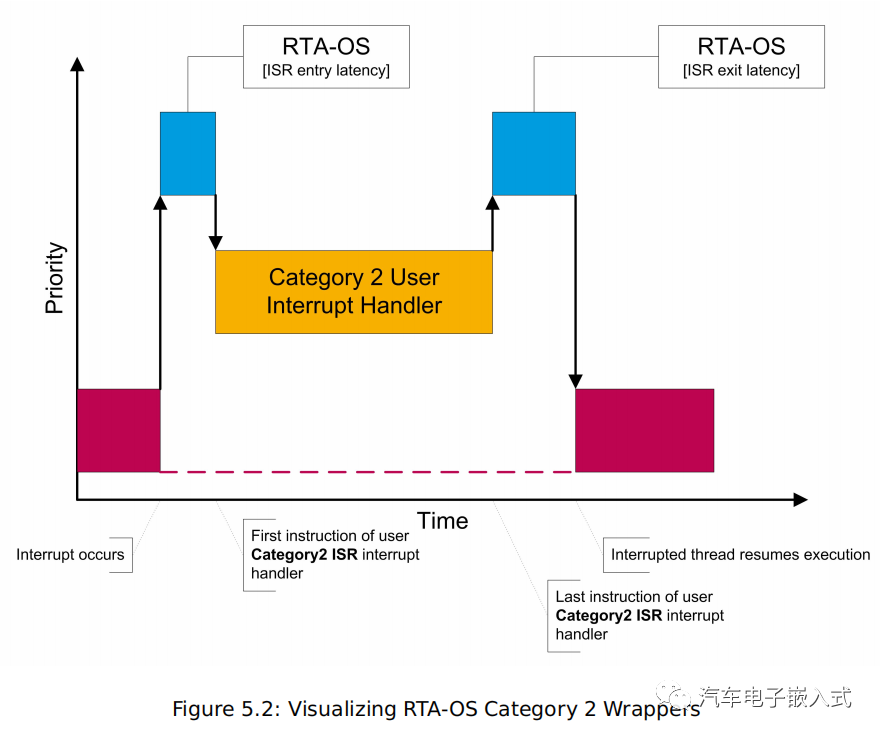
二類中斷:一般項目中使用的都是此類中斷,中斷發生時,RTA-OS執行內部代碼,然后調用用戶提供的ISR。中斷執行從ISR的指定入口點開始,一直持續到入口函數返回。
2.2 中斷優先級
在中斷的一般應用中,中斷以多級中斷應用為主,按中斷優先級(IPL-Interrupt Priority Level)執行,RTA-OS對IPL進行了標準化,其中IPL 0表示用戶級別,其中所有任務都執行,IPL為1或更多表示中斷級別。
在單級平臺上有兩個IPL,0和1。IPL 0表示目標不被中斷,任務按優先級順序運行。IPL 1表示目標正在為中斷提供服務。由于只有一個非零IPL,所有中斷(類別1和類別2)都以相同的優先級運行。這意味著所有中斷都是序列化的,如下圖(a)。
在多級平臺上,高優先級中斷可以搶占低優先級中斷,因此ISRs處理程序可以嵌套,但ISR不能被低優先級任務搶占,如下圖(b)。
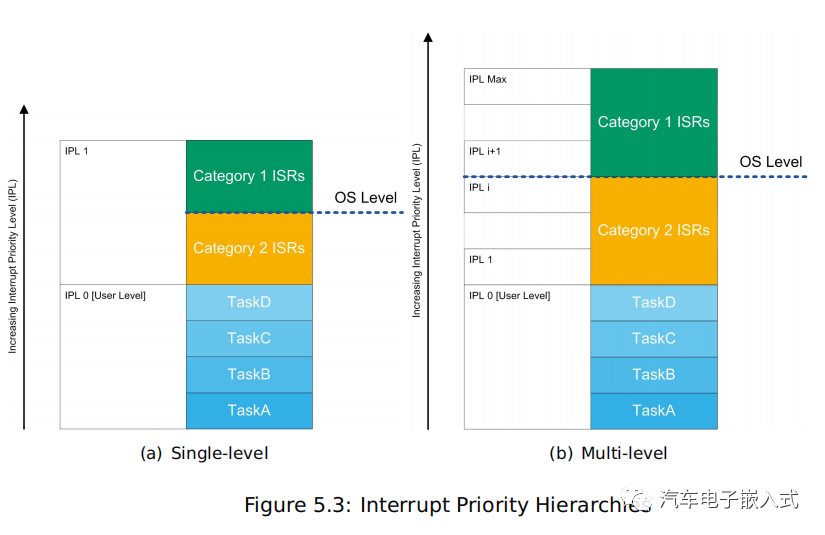
根據優先級順序,一類中斷優先級更高,其不能被二類中斷搶占,所有的2類中斷都比最低級的一類中斷低。
也可進一步對中斷的優先級按Task及OS級別繼續劃分為User Level和OS Level,此兩種中斷劃分也是宏觀級別的劃分,具體如下:
2.2.1 User Level
所謂User level,即是用戶可以控制的級別,即Task級別,用戶級別是允許處理所有中斷的最低中斷優先級。所有任務都從其入口點開始在用戶級別執行。
任務有時需要在用戶級別以上運行,例如,它可能需要訪問與ISR共享的數據。當數據被訪問時,必須防止中斷被調用。實現這一點的最簡單方法是,可以在任務在訪問數據時禁用中斷。另一種方法是使用Resource機制,即當Task或2類中斷已經獲得資源后,其他任務或ISR無法獲得該資源,防止任何其他任務或ISR同時進入同一關鍵部分,如修改同一處變量導致程序出錯。
2.2.2 OS Level
由于二類中斷是需要OS參與,這樣2類ISR的最高優先級定義了OS級別。如果執行發生在OS級別或更高級別(一類中斷),則不會發生其他類別2中斷。RTA-OS使用OS Level來防止并發訪問內部操作系統數據結構。
3. 中斷的應用
3.1 中斷常用API
對于RTA-OS,在StartOS()后默認所有中斷都打開,實際使用中,一般常用API為使能或禁用中斷,掛起、恢復中斷,可以調用如下API來啟用或禁用中斷:
DisableAllInterrupts():禁用所有中斷
EnableAllInterrupts():使能所有中斷
SuspendAllInterrupts() :掛起所有中斷
ResumeAllInterrupts():恢復所有中斷
SuspendOSInterrupts() :掛起OS級別中斷
ResumeOSInterrupts():恢復OS級別中斷
以上API在實際使用中,需注意:
1) DisableAllInterrupts() and EnableAllInterrupts()在硬件層面啟用或禁用中斷,這兩個API不能嵌套;
在DisableAllInterrupts()后必須再調用EnableAllInterrupts();
2) SuspendAllInterrupts() and ResumeAllInterrupts(),掛起及恢復所有中斷,可以被嵌套;
3) SuspendOSInterrupts() and ResumeOSInterrupts(),可以嵌套使用;
4)Suspend與Resume需要成對出現,Resume不要比Suspend多;
5) 一類中斷在關閉期間,不可以調用OS的API;
6) 如果2類ISR將中斷級別提高到OS級別以上,并調用DisableAllInterrupts( ),則它可能不會進行任何其他RTA-OS API調用,但用于恢復中斷優先級的EnableAllInterrupts( )調用除外。執行ISR時,不允許將中斷優先級降低到初始級別以下。
3.2 一/二類中斷的處理
3.2.1一類中斷的處理
用戶必須確保一類ISR輸入功能的名稱與用戶在配置期間為ISR指定的名稱相同。
對于一類ISR,在定義輸入函數時,通常必須使用編譯器特定的關鍵字,RTA-OS提供了一個名為CAT1_ISR的宏,該宏可擴展為編譯器工具鏈的正確指令,用戶應使用該指令將函數標記為一類ISR。
3.2.2 二類中斷的處理
二類中斷在RTA-OS控制下執行,但不得在2類ISR中放置“中斷返回”命令,中斷返回由RTA-OS處理。當二類中斷需要執行時,由RTA-OS調用中斷的入口函數,二類中斷的入口函數如下:
#includeISR(isr_identifier){ /* Handler body. */ }
3.3 中斷解除
當硬件檢測到中斷時,它通常會設置一個掛起位,告訴中斷控制器中斷已經發生。然后,中斷控制器將通過中斷向量表跳轉到處理程序,掛起位的處理取決于目標,但有兩個基本方式:
1)中斷處理后(即中斷處理程序的分支發生時),掛起位自動清除。當處理程序退出時,如果在處理當前中斷時中斷變為掛起狀態,它將自動重新觸發。
2)掛起位必須由中斷處理程序中的用戶代碼手動清除。中斷處理程序的主體,無論是一類還是二類都需要包含清除掛起位的代碼,并向硬件發送中斷已被處理的信號。
3.4 中斷實際配置
RTA-OS使用的是靜態配置,項目實際開發中,需要OS開發人員在OS模塊開始配置前對各模塊(Adc、Pwm、Gpt等)的中斷需求進行分析,如一類/二類中斷?中斷優先級?回調函數名稱?等,OS開發人員還需要對中斷優先級進行評估,是否會影響系統中其他模塊工作。
此外,RTA-OS使用指定的向量為中斷生成向量表條目。與中斷優先級一樣,中斷向量配置也是MCU特有(不同MCU,對應的向量表不同)的,因此在配置中斷向量之前需要特別注意MCU選擇。
3.5 更高效的中斷處理方式
每個中斷處理程序將在代碼執行期間阻止所有優先級相同或較低的中斷。在編寫中斷處理程序時,最好將處理程序盡可能短。長時間運行的處理程序會為低優先級中斷的服務增加額外的延遲。
使用中如果需要在中斷中處理較多的代碼,可以采用:將代碼寫到Task中,再通過中斷來激活Task,這樣低優先級的任務可以打斷該Task從而減少延遲,示例代碼如下:
#includeISR(EfficientHandler){ ActivateTask(Task1); } TASK(Task1){ /*Longhandlercode.*/ TerminateTask(); }
審核編輯:湯梓紅
-
處理器
+關注
關注
68文章
19395瀏覽量
230696 -
mcu
+關注
關注
146文章
17303瀏覽量
352148 -
看門狗
+關注
關注
10文章
566瀏覽量
70893 -
中斷
+關注
關注
5文章
900瀏覽量
41634
原文標題:RTA OS系列介紹02-中斷
文章出處:【微信號:汽車電子嵌入式,微信公眾號:汽車電子嵌入式】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
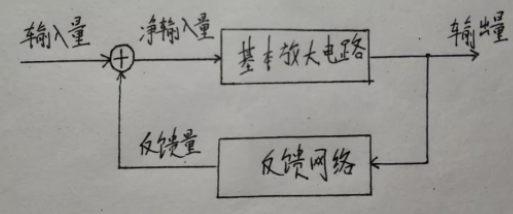
放大電路中反饋的基本概念及判斷方法
USB基本概念及從機編程方法介紹
中斷基本概念總結
電路的基本概念及定律 英語中文對照表

STM32的基本概念及中斷應用
單片機中斷的基本概念及中斷系統有什么優點
數字地、模擬地、信號地、交流地、直流地、屏蔽地、浮地基本概念及PCB地線分割的方法






 工商網監
工商網監
評論