") YOLOv5全面解析教程:train.py逐代碼解析
YOLOv5全面解析教程:train.py逐代碼解析
前言
代碼倉庫地址:https://github.com/Oneflow-Inc/one-yolov5歡迎star one-yolov5項目 獲取最新的動態(tài)。如果您有問題,歡迎在倉庫給我們提出寶貴的意見。如果對您有幫助,歡迎來給我Star呀~
源碼解讀: train.py 本文涉及到了大量的超鏈接,但是在微信文章里面外鏈接會被吃掉 ,所以歡迎大家到這里查看本篇文章的完整版本。
這個文件是yolov5的訓(xùn)練腳本。總體代碼流程:
準(zhǔn)備工作: 數(shù)據(jù) + 模型 + 學(xué)習(xí)率 + 優(yōu)化器
訓(xùn)練過程:
一個訓(xùn)練過程(不包括數(shù)據(jù)準(zhǔn)備),會輪詢多次訓(xùn)練集,每次稱為一個epoch,每個epoch又分為多個batch來訓(xùn)練。流程先后拆解成:
開始訓(xùn)練
訓(xùn)練一個epoch前
訓(xùn)練一個batch前
訓(xùn)練一個batch后
訓(xùn)練一個epoch后。
評估驗證集
結(jié)束訓(xùn)練
1. 導(dǎo)入需要的包和基本配置
importargparse#解析命令行參數(shù)模塊 importmath#數(shù)學(xué)公式模塊 importos#與操作系統(tǒng)進(jìn)行交互的模塊包含文件路徑操作和解析 importrandom#生成隨機數(shù)的模塊 importsys#sys系統(tǒng)模塊包含了與Python解釋器和它的環(huán)境有關(guān)的函數(shù) importtime#時間模塊更底層 fromcopyimportdeepcopy#深拷貝模塊 fromdatetimeimportdatetime#基本日期和時間類型模塊 frompathlibimportPath#Path模塊將str轉(zhuǎn)換為Path對象使字符串路徑易于操作 importnumpyasnp#numpy數(shù)組操作模塊 importoneflowasflow#OneFlow深度學(xué)習(xí)框架 importoneflow.distributedasdist#分布式訓(xùn)練模塊 importoneflow.nnasnn#對oneflow.nn.functional的類的封裝有很多和oneflow.nn.functional相同的函數(shù) importyaml#操作yaml文件模塊 fromoneflow.optimimportlr_scheduler#學(xué)習(xí)率模塊 fromtqdmimporttqdm#進(jìn)度條模塊 importval#導(dǎo)入val.py,forend-of-epochmAP frommodels.experimentalimportattempt_load#導(dǎo)入在線下載模塊 frommodels.yoloimportModel#導(dǎo)入YOLOv5的模型定義 fromutils.autoanchorimportcheck_anchors#導(dǎo)入檢查anchors合法性的函數(shù) #Callbackshttps://start.oneflow.org/oneflow-yolo-doc/source_code_interpretation/callbacks_py.html fromutils.callbacksimportCallbacks#和日志相關(guān)的回調(diào)函數(shù) #dataloadershttps://github.com/Oneflow-Inc/oneflow-yolo-doc/blob/master/docs/source_code_interpretation/utils/dataladers_py.md fromutils.dataloadersimportcreate_dataloader#加載數(shù)據(jù)集的函數(shù) #downloadshttps://github.com/Oneflow-Inc/oneflow-yolo-doc/blob/master/docs/source_code_interpretation/utils/downloads_py.md fromutils.downloadsimportis_url#判斷當(dāng)前字符串是否是鏈接 #generalhttps://github.com/Oneflow-Inc/oneflow-yolo-doc/blob/master/docs/source_code_interpretation/utils/general_py.md fromutils.generalimportcheck_img_size#check_suffix, fromutils.generalimport( LOGGER, check_dataset, check_file, check_git_status, check_requirements, check_yaml, colorstr, get_latest_run, increment_path, init_seeds, intersect_dicts, labels_to_class_weights, labels_to_image_weights, methods, one_cycle, print_args, print_mutation, strip_optimizer, yaml_save, model_save, ) fromutils.loggersimportLoggers#導(dǎo)入日志管理模塊 fromutils.loggers.wandb.wandb_utilsimportcheck_wandb_resume fromutils.lossimportComputeLoss#導(dǎo)入計算Loss的模塊 #在YOLOv5中,fitness函數(shù)實現(xiàn)對[P,R,mAP@.5,mAP@.5-.95]指標(biāo)進(jìn)行加權(quán) fromutils.metricsimportfitness fromutils.oneflow_utilsimportEarlyStopping,ModelEMA,de_parallel,select_device,smart_DDP,smart_optimizer,smart_resume#導(dǎo)入早停機制模塊,模型滑動平均更新模塊,解分布式模塊,智能選擇設(shè)備,智能優(yōu)化器以及智能斷點續(xù)訓(xùn)模塊等 fromutils.plotsimportplot_evolve,plot_labels #LOCAL_RANK:當(dāng)前進(jìn)程對應(yīng)的GPU號。 LOCAL_RANK=int(os.getenv("LOCAL_RANK",-1))#https://pytorch.org/docs/stable/elastic/run.html #RANK:當(dāng)前進(jìn)程的序號,用于進(jìn)程間通訊,rank=0的主機為master節(jié)點。 RANK=int(os.getenv("RANK",-1)) #WORLD_SIZE:總的進(jìn)程數(shù)量(原則上第一個process占用一個GPU是較優(yōu)的)。 WORLD_SIZE=int(os.getenv("WORLD_SIZE",1)) #Linux下: #FILE='path/to/one-yolov5/train.py' #將'path/to/one-yolov5'加入系統(tǒng)的環(huán)境變量該腳本結(jié)束后失效。 FILE=Path(__file__).resolve() ROOT=FILE.parents[0]#YOLOv5rootdirectory ifstr(ROOT)notinsys.path: sys.path.append(str(ROOT))#addROOTtoPATH ROOT=Path(os.path.relpath(ROOT,Path.cwd()))#relative
2. parse_opt 函數(shù)
這個函數(shù)用于設(shè)置opt參數(shù)
weights:權(quán)重文件 cfg:模型配置文件包括nc、depth_multiple、width_multiple、anchors、backbone、head等 data:數(shù)據(jù)集配置文件包括path、train、val、test、nc、names、download等 hyp:初始超參文件 epochs:訓(xùn)練輪次 batch-size:訓(xùn)練批次大小 img-size:輸入網(wǎng)絡(luò)的圖片分辨率大小 resume:斷點續(xù)訓(xùn),從上次打斷的訓(xùn)練結(jié)果處接著訓(xùn)練默認(rèn)False nosave:不保存模型默認(rèn)False(保存)True:onlytestfinalepoch notest:是否只測試最后一輪默認(rèn)FalseTrue:只測試最后一輪False:每輪訓(xùn)練完都測試mAP workers:dataloader中的最大work數(shù)(線程個數(shù)) device:訓(xùn)練的設(shè)備 single-cls:數(shù)據(jù)集是否只有一個類別默認(rèn)False rect:訓(xùn)練集是否采用矩形訓(xùn)練默認(rèn)False可以參考:https://start.oneflow.org/oneflow-yolo-doc/tutorials/05_chapter/rectangular_reasoning.html noautoanchor:不自動調(diào)整anchor默認(rèn)False(自動調(diào)整anchor) evolve:是否進(jìn)行超參進(jìn)化默認(rèn)False multi-scale:是否使用多尺度訓(xùn)練默認(rèn)False label-smoothing:標(biāo)簽平滑增強默認(rèn)0.0不增強要增強一般就設(shè)為0.1 adam:是否使用adam優(yōu)化器默認(rèn)False(使用SGD) sync-bn:是否使用跨卡同步BN操作,在DDP中使用默認(rèn)False linear-lr:是否使用linearlr線性學(xué)習(xí)率默認(rèn)False使用cosinelr cache-image:是否提前緩存圖片到內(nèi)存cache,以加速訓(xùn)練默認(rèn)False image-weights:是否使用圖片加權(quán)選擇策略(selectionimgtotrainingbyclassweights)默認(rèn)False不使用 bucket:谷歌云盤bucket一般用不到 project:訓(xùn)練結(jié)果保存的根目錄默認(rèn)是runs/train name:訓(xùn)練結(jié)果保存的目錄默認(rèn)是exp最終:runs/train/exp exist-ok:如果文件存在就ok不存在就新建或incrementname默認(rèn)False(默認(rèn)文件都是不存在的) quad:dataloader取數(shù)據(jù)時,是否使用collate_fn4代替collate_fn默認(rèn)False save_period:Logmodelafterevery"save_period"epoch,默認(rèn)-1不需要logmodel信息 artifact_alias:whichversionofdatasetartifacttobestripped默認(rèn)lastest貌似沒用到這個參數(shù)? local_rank:當(dāng)前進(jìn)程對應(yīng)的GPU號。-1且gpu=1時不進(jìn)行分布式 entity:wandbentity默認(rèn)None upload_dataset:是否上傳dataset到wandbtabel(將數(shù)據(jù)集作為交互式dsviz表在瀏覽器中查看、查詢、篩選和分析數(shù)據(jù)集)默認(rèn)False bbox_interval:設(shè)置帶邊界框圖像記錄間隔Setbounding-boximageloggingintervalforW&B默認(rèn)-1opt.epochs//10 bbox_iou_optim:這個參數(shù)代表啟用oneflow針對bbox_iou部分的優(yōu)化,使得訓(xùn)練速度更快
更多細(xì)節(jié)請點這
3 main函數(shù)
3.1 Checks
defmain(opt,callbacks=Callbacks()):
#Checks
ifRANKin{-1,0}:
#輸出所有訓(xùn)練opt參數(shù)train:...
print_args(vars(opt))
#檢查代碼版本是否是最新的github:...
check_git_status()
#檢查requirements.txt所需包是否都滿足requirements:...
check_requirements(exclude=["thop"])
3.2 Resume
判斷是否使用斷點續(xù)訓(xùn)resume, 讀取參數(shù)
使用斷點續(xù)訓(xùn) 就從path/to/last模型文件夾中讀取相關(guān)參數(shù);不使用斷點續(xù)訓(xùn) 就從文件中讀取相關(guān)參數(shù)
#2、判斷是否使用斷點續(xù)訓(xùn)resume,讀取參數(shù) ifopt.resumeandnot(check_wandb_resume(opt)oropt.evolve):#resumefromspecifiedormostrecentlast #使用斷點續(xù)訓(xùn)就從last模型文件夾中讀取相關(guān)參數(shù) #如果resume是str,則表示傳入的是模型的路徑地址 #如果resume是True,則通過get_lastest_run()函數(shù)找到runs文件夾中最近的權(quán)重文件last last=Path(check_file(opt.resume)ifisinstance(opt.resume,str)elseget_latest_run()) opt_yaml=last.parent.parent/"opt.yaml"#trainoptionsyaml opt_data=opt.data#originaldataset ifopt_yaml.is_file(): #相關(guān)的opt參數(shù)也要替換成last中的opt參數(shù) withopen(opt_yaml,errors="ignore")asf: d=yaml.safe_load(f) else: d=flow.load(last,map_location="cpu")["opt"] opt=argparse.Namespace(**d)#replace opt.cfg,opt.weights,opt.resume="",str(last),True#reinstate ifis_url(opt_data): opt.data=check_file(opt_data)#avoidHUBresumeauthtimeout else: #不使用斷點續(xù)訓(xùn)就從文件中讀取相關(guān)參數(shù) #opt.hyp=opt.hypor('hyp.finetune.yaml'ifopt.weightselse'hyp.scratch.yaml') opt.data,opt.cfg,opt.hyp,opt.weights,opt.project=( check_file(opt.data), check_yaml(opt.cfg), check_yaml(opt.hyp), str(opt.weights), str(opt.project), )#checks assertlen(opt.cfg)orlen(opt.weights),"either--cfgor--weightsmustbespecified" ifopt.evolve: ifopt.project==str(ROOT/"runs/train"):#ifdefaultprojectname,renametoruns/evolve opt.project=str(ROOT/"runs/evolve") opt.exist_ok,opt.resume=( opt.resume, False, )#passresumetoexist_okanddisableresume ifopt.name=="cfg": opt.name=Path(opt.cfg).stem#usemodel.yamlasname #根據(jù)opt.project生成目錄如:runs/train/exp18 opt.save_dir=str(increment_path(Path(opt.project)/opt.name,exist_ok=opt.exist_ok))
3.3 DDP mode
DDP mode設(shè)置
#3、DDP模式的設(shè)置
"""select_device
select_device函數(shù):設(shè)置當(dāng)前腳本的device:cpu或者cuda。
并且當(dāng)且僅當(dāng)使用cuda時并且有多塊gpu時可以使用ddp模式,否則拋出報錯信息。batch_size需要整除總的進(jìn)程數(shù)量。
另外DDP模式不支持AutoBatch功能,使用DDP模式必須手動指定batchsize。
"""
device=select_device(opt.device,batch_size=opt.batch_size)
ifLOCAL_RANK!=-1:
msg="isnotcompatiblewithYOLOv5Multi-GPUDDPtraining"
assertnotopt.image_weights,f"--image-weights{msg}"
assertnotopt.evolve,f"--evolve{msg}"
assertopt.batch_size!=-1,f"AutoBatchwith--batch-size-1{msg},pleasepassavalid--batch-size"
assertopt.batch_size%WORLD_SIZE==0,f"--batch-size{opt.batch_size}mustbemultipleofWORLD_SIZE"
assertflow.cuda.device_count()>LOCAL_RANK,"insufficientCUDAdevicesforDDPcommand"
flow.cuda.set_device(LOCAL_RANK)
device=flow.device("cuda",LOCAL_RANK)
3.4Train
不使用進(jìn)化算法 正常Train
#Train ifnotopt.evolve: #如果不進(jìn)行超參進(jìn)化那么就直接調(diào)用train()函數(shù),開始訓(xùn)練 train(opt.hyp,opt,device,callbacks)
3.5 Evolve hyperparameters (optional)
遺傳進(jìn)化算法,先進(jìn)化出最佳超參后訓(xùn)練
#否則使用超參進(jìn)化算法(遺傳算法)求出最佳超參再進(jìn)行訓(xùn)練
else:
#Hyperparameterevolutionmetadata(mutationscale0-1,lower_limit,upper_limit)
#超參進(jìn)化列表(突變規(guī)模,最小值,最大值)
meta={
"lr0":(1,1e-5,1e-1),#initiallearningrate(SGD=1E-2,Adam=1E-3)
"lrf":(1,0.01,1.0),#finalOneCycleLRlearningrate(lr0*lrf)
"momentum":(0.3,0.6,0.98),#SGDmomentum/Adambeta1
"weight_decay":(1,0.0,0.001),#optimizerweightdecay
"warmup_epochs":(1,0.0,5.0),#warmupepochs(fractionsok)
"warmup_momentum":(1,0.0,0.95),#warmupinitialmomentum
"warmup_bias_lr":(1,0.0,0.2),#warmupinitialbiaslr
"box":(1,0.02,0.2),#boxlossgain
"cls":(1,0.2,4.0),#clslossgain
"cls_pw":(1,0.5,2.0),#clsBCELosspositive_weight
"obj":(1,0.2,4.0),#objlossgain(scalewithpixels)
"obj_pw":(1,0.5,2.0),#objBCELosspositive_weight
"iou_t":(0,0.1,0.7),#IoUtrainingthreshold
"anchor_t":(1,2.0,8.0),#anchor-multiplethreshold
"anchors":(2,2.0,10.0),#anchorsperoutputgrid(0toignore)
"fl_gamma":(0,0.0,2.0),#focallossgamma(efficientDetdefaultgamma=1.5)
"hsv_h":(1,0.0,0.1),#imageHSV-Hueaugmentation(fraction)
"hsv_s":(1,0.0,0.9),#imageHSV-Saturationaugmentation(fraction)
"hsv_v":(1,0.0,0.9),#imageHSV-Valueaugmentation(fraction)
"degrees":(1,0.0,45.0),#imagerotation(+/-deg)
"translate":(1,0.0,0.9),#imagetranslation(+/-fraction)
"scale":(1,0.0,0.9),#imagescale(+/-gain)
"shear":(1,0.0,10.0),#imageshear(+/-deg)
"perspective":(0,0.0,0.001),#imageperspective(+/-fraction),range0-0.001
"flipud":(1,0.0,1.0),#imageflipup-down(probability)
"fliplr":(0,0.0,1.0),#imageflipleft-right(probability)
"mosaic":(1,0.0,1.0),#imagemixup(probability)
"mixup":(1,0.0,1.0),#imagemixup(probability)
"copy_paste":(1,0.0,1.0),
}#segmentcopy-paste(probability)
withopen(opt.hyp,errors="ignore")asf:#載入初始超參
hyp=yaml.safe_load(f)#loadhypsdict
if"anchors"notinhyp:#anchorscommentedinhyp.yaml
hyp["anchors"]=3
opt.noval,opt.nosave,save_dir=(
True,
True,
Path(opt.save_dir),
)#onlyval/savefinalepoch
#ei=[isinstance(x,(int,float))forxinhyp.values()]#evolvableindices
#evolve_yaml超參進(jìn)化后文件保存地址
evolve_yaml,evolve_csv=save_dir/"hyp_evolve.yaml",save_dir/"evolve.csv"
ifopt.bucket:
os.system(f"gsutilcpgs://{opt.bucket}/evolve.csv{evolve_csv}")#downloadevolve.csvifexists
"""
使用遺傳算法進(jìn)行參數(shù)進(jìn)化默認(rèn)是進(jìn)化300代
這里的進(jìn)化算法原理為:根據(jù)之前訓(xùn)練時的hyp來確定一個basehyp再進(jìn)行突變,具體是通過之前每次進(jìn)化得到的results來確定之前每個hyp的權(quán)重,有了每個hyp和每個hyp的權(quán)重之后有兩種進(jìn)化方式;
1.根據(jù)每個hyp的權(quán)重隨機選擇一個之前的hyp作為basehyp,random.choices(range(n),weights=w)
2.根據(jù)每個hyp的權(quán)重對之前所有的hyp進(jìn)行融合獲得一個basehyp,(x*w.reshape(n,1)).sum(0)/w.sum()
evolve.txt會記錄每次進(jìn)化之后的results+hyp
每次進(jìn)化時,hyp會根據(jù)之前的results進(jìn)行從大到小的排序;
再根據(jù)fitness函數(shù)計算之前每次進(jìn)化得到的hyp的權(quán)重
(其中fitness是我們尋求最大化的值。在YOLOv5中,fitness函數(shù)實現(xiàn)對[P,R,mAP@.5,mAP@.5-.95]指標(biāo)進(jìn)行加權(quán)。)
再確定哪一種進(jìn)化方式,從而進(jìn)行進(jìn)化。
這部分代碼其實不是很重要并且也比較難理解,大家如果沒有特殊必要的話可以忽略,因為正常訓(xùn)練也不會用到超參數(shù)進(jìn)化。
"""
for_inrange(opt.evolve):#generationstoevolve
ifevolve_csv.exists():#ifevolve.csvexists:selectbesthypsandmutate
#Selectparent(s)
parent="single"#parentselectionmethod:'single'or'weighted'
x=np.loadtxt(evolve_csv,ndmin=2,delimiter=",",skiprows=1)
n=min(5,len(x))#numberofpreviousresultstoconsider
#fitness是我們尋求最大化的值。在YOLOv5中,fitness函數(shù)實現(xiàn)對[P,R,mAP@.5,mAP@.5-.95]指標(biāo)進(jìn)行加權(quán)
x=x[np.argsort(-fitness(x))][:n]#topnmutations
w=fitness(x)-fitness(x).min()+1e-6#weights(sum>0)
ifparent=="single"orlen(x)==1:
#x=x[random.randint(0,n-1)]#randomselection
x=x[random.choices(range(n),weights=w)[0]]#weightedselection
elifparent=="weighted":
x=(x*w.reshape(n,1)).sum(0)/w.sum()#weightedcombination
#Mutate
mp,s=0.8,0.2#mutationprobability,sigma
npr=np.random
npr.seed(int(time.time()))
g=np.array([meta[k][0]forkinhyp.keys()])#gains0-1
ng=len(meta)
v=np.ones(ng)
whileall(v==1):#mutateuntilachangeoccurs(preventduplicates)
v=(g*(npr.random(ng)
4 def train(hyp, opt, device, callbacks):
4.1 載入?yún)?shù)
"""
:paramshyp:data/hyps/hyp.scratch.yamlhypdictionary
:paramsopt:main中opt參數(shù)
:paramsdevice:當(dāng)前設(shè)備
:paramscallbacks:和日志相關(guān)的回調(diào)函數(shù)https://start.oneflow.org/oneflow-yolo-doc/source_code_interpretation/callbacks_py.html
"""
deftrain(hyp,opt,device,callbacks):#hypispath/to/hyp.yamlorhypdictionary
(save_dir,epochs,batch_size,weights,single_cls,evolve,data,cfg,resume,noval,nosave,workers,freeze,bbox_iou_optim)=(
Path(opt.save_dir),
opt.epochs,
opt.batch_size,
opt.weights,
opt.single_cls,
opt.evolve,
opt.data,
opt.cfg,
opt.resume,
opt.noval,
opt.nosave,
opt.workers,
opt.freeze,
opt.bbox_iou_optim,
)
4.2 初始化參數(shù)和配置信息
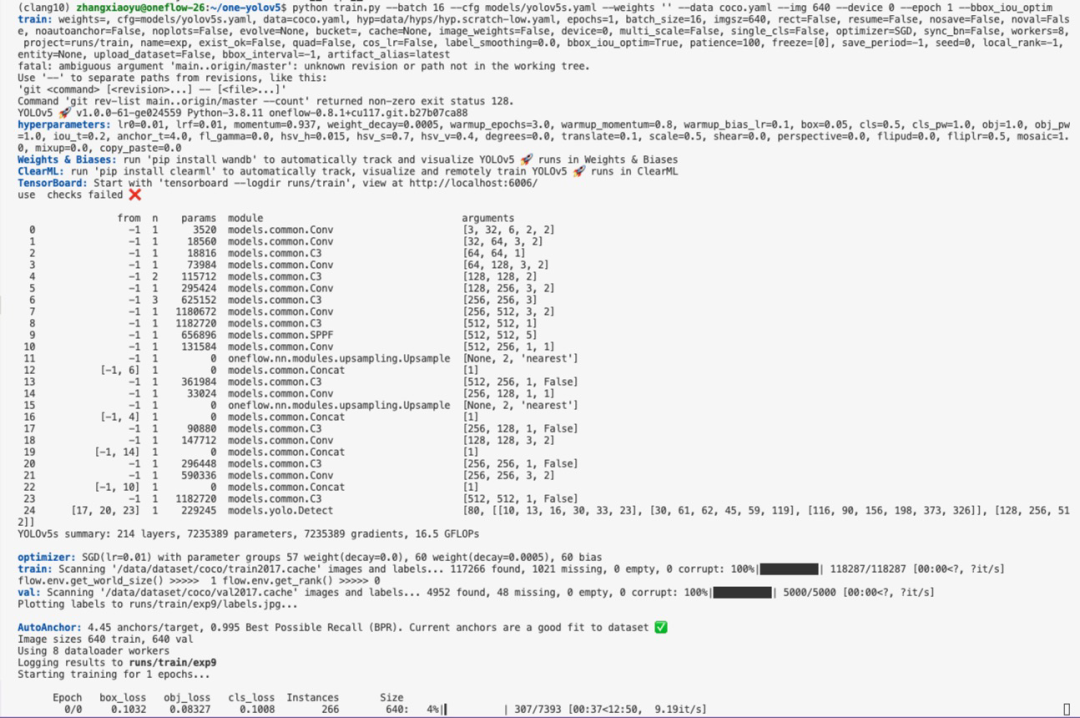
下面輸出超參數(shù)的時候截圖如下:

#和日志相關(guān)的回調(diào)函數(shù),記錄當(dāng)前代碼執(zhí)行的階段
callbacks.run("on_pretrain_routine_start")
#保存權(quán)重路徑如runs/train/exp18/weights
w=save_dir/"weights"#weightsdir
(w.parentifevolveelsew).mkdir(parents=True,exist_ok=True)#makedir
last,best=w/"last",w/"best"
#Hyperparameters超參
ifisinstance(hyp,str):
withopen(hyp,errors="ignore")asf:
#loadhypsdict加載超參信息
hyp=yaml.safe_load(f)#loadhypsdict
#日志輸出超參信息hyperparameters:...
LOGGER.info(colorstr("hyperparameters:")+",".join(f"{k}={v}"fork,vinhyp.items()))
opt.hyp=hyp.copy()#forsavinghypstocheckpoints
#保存運行時的參數(shù)配置
ifnotevolve:
yaml_save(save_dir/"hyp.yaml",hyp)
yaml_save(save_dir/"opt.yaml",vars(opt))
#Loggers
data_dict=None
ifRANKin{-1,0}:
#初始化Loggers對象
#def__init__(self,save_dir=None,weights=None,opt=None,hyp=None,logger=None,include=LOGGERS):
loggers=Loggers(save_dir,weights,opt,hyp,LOGGER)#loggersinstance
#Registeractions
forkinmethods(loggers):#注冊鉤子https://github.com/Oneflow-Inc/one-yolov5/blob/main/utils/callbacks.py
callbacks.register_action(k,callback=getattr(loggers,k))
#Config
#是否需要畫圖:所有的labels信息、迭代的epochs、訓(xùn)練結(jié)果等
plots=notevolveandnotopt.noplots#createplots
cuda=device.type!="cpu"
#初始化隨機數(shù)種子
init_seeds(opt.seed+1+RANK,deterministic=True)
data_dict=data_dictorcheck_dataset(data)#checkifNone
train_path,val_path=data_dict["train"],data_dict["val"]
#nc:numberofclasses數(shù)據(jù)集有多少種類別
nc=1ifsingle_clselseint(data_dict["nc"])#numberofclasses
#如果只有一個類別并且data_dict里沒有names這個key的話,我們將names設(shè)置為["item"]代表目標(biāo)
names=["item"]ifsingle_clsandlen(data_dict["names"])!=1elsedata_dict["names"]#classnames
assertlen(names)==nc,f"{len(names)}namesfoundfornc={nc}datasetin{data}"#check
#當(dāng)前數(shù)據(jù)集是否是coco數(shù)據(jù)集(80個類別)
is_coco=isinstance(val_path,str)andval_path.endswith("coco/val2017.txt")#COCOdataset
4.3 model
#檢查權(quán)重命名合法性:
#合法:pretrained=True;
#不合法:pretrained=False;
pretrained=check_wights(weights)
#載入模型
ifpretrained:
#使用預(yù)訓(xùn)練
#---------------------------------------------------------#
#加載模型及參數(shù)
ckpt=flow.load(weights,map_location="cpu")#loadcheckpointtoCPUtoavoidCUDAmemoryleak
#這里加載模型有兩種方式,一種是通過opt.cfg另一種是通過ckpt['model'].yaml
#區(qū)別在于是否使用resume如果使用resume會將opt.cfg設(shè)為空,按照ckpt['model'].yaml來創(chuàng)建模型
#這也影響了下面是否除去anchor的key(也就是不加載anchor),如果resume則不加載anchor
#原因:保存的模型會保存anchors,有時候用戶自定義了anchor之后,再resume,則原來基于coco數(shù)據(jù)集的anchor會自己覆蓋自己設(shè)定的anchor
#詳情參考:https://github.com/ultralytics/yolov5/issues/459
#所以下面設(shè)置intersect_dicts()就是忽略exclude
model=Model(cfgorckpt["model"].yaml,ch=3,nc=nc,anchors=hyp.get("anchors")).to(device)#create
exclude=["anchor"]if(cfgorhyp.get("anchors"))andnotresumeelse[]#excludekeys
csd=ckpt["model"].float().state_dict()#checkpointstate_dictasFP32
#篩選字典中的鍵值對把exclude刪除
csd=intersect_dicts(csd,model.state_dict(),exclude=exclude)#intersect
#載入模型權(quán)重
model.load_state_dict(csd,strict=False)#load
LOGGER.info(f"Transferred{len(csd)}/{len(model.state_dict())}itemsfrom{weights}")#report
else:
#不使用預(yù)訓(xùn)練
model=Model(cfg,ch=3,nc=nc,anchors=hyp.get("anchors")).to(device)#create
#注意一下:one-yolov5的amp訓(xùn)練還在開發(fā)調(diào)試中,暫時關(guān)閉,后續(xù)支持后打開。但half的推理目前我們是支持的
#amp=check_amp(model)#checkAMP
amp=False
#Freeze
#凍結(jié)權(quán)重層
#這里只是給了凍結(jié)權(quán)重層的一個例子,但是作者并不建議凍結(jié)權(quán)重層,訓(xùn)練全部層參數(shù),可以得到更好的性能,不過也會更慢
freeze=[f"model.{x}."forxin(freezeiflen(freeze)>1elserange(freeze[0]))]#layerstofreeze
fork,vinmodel.named_parameters():
v.requires_grad=True#trainalllayers
#NaNto0(commentedforerratictrainingresults)
#v.register_hook(lambdax:torch.nan_to_num(x))
ifany(xinkforxinfreeze):
LOGGER.info(f"freezing{k}")
v.requires_grad=False
4.4 Optimizer
選擇優(yōu)化器
#Optimizer
nbs=64#nominalbatchsize
accumulate=max(round(nbs/batch_size),1)#accumulatelossbeforeoptimizing
hyp["weight_decay"]*=batch_size*accumulate/nbs#scaleweight_decay
optimizer=smart_optimizer(model,opt.optimizer,hyp["lr0"],hyp["momentum"],hyp["weight_decay"])
4.5 學(xué)習(xí)率
#Scheduler
ifopt.cos_lr:
#使用onecycle學(xué)習(xí)率https://arxiv.org/pdf/1803.09820.pdf
lf=one_cycle(1,hyp["lrf"],epochs)#cosine1->hyp['lrf']
else:
#使用線性學(xué)習(xí)率
deff(x):
return(1-x/epochs)*(1.0-hyp["lrf"])+hyp["lrf"]
lf=f#linear
#實例化scheduler
scheduler=lr_scheduler.LambdaLR(optimizer,lr_lambda=lf)#plot_lr_scheduler(optimizer,scheduler,epochs)
4.6 EMA
單卡訓(xùn)練: 使用EMA(指數(shù)移動平均)對模型的參數(shù)做平均, 一種給予近期數(shù)據(jù)更高權(quán)重的平均方法, 以求提高測試指標(biāo)并增加模型魯棒。
#EMA
ema=ModelEMA(model)ifRANKin{-1,0}elseNone
4.7 Resume
斷點續(xù)訓(xùn)
#Resume
best_fitness,start_epoch=0.0,0
ifpretrained:
ifresume:
best_fitness,start_epoch,epochs=smart_resume(ckpt,optimizer,ema,weights,epochs,resume)
delckpt,csd
4.8 SyncBatchNorm
SyncBatchNorm可以提高多gpu訓(xùn)練的準(zhǔn)確性,但會顯著降低訓(xùn)練速度。它僅適用于多GPU DistributedDataParallel 訓(xùn)練。
#SyncBatchNorm
ifopt.sync_bnandcudaandRANK!=-1:
model=flow.nn.SyncBatchNorm.convert_sync_batchnorm(model).to(device)
LOGGER.info("UsingSyncBatchNorm()")
4.9 數(shù)據(jù)加載
#Trainloaderhttps://start.oneflow.org/oneflow-yolo-doc/source_code_interpretation/utils/dataladers_py.html
train_loader,dataset=create_dataloader(
train_path,
imgsz,
batch_size//WORLD_SIZE,
gs,
single_cls,
hyp=hyp,
augment=True,
cache=Noneifopt.cache=="val"elseopt.cache,
rect=opt.rect,
rank=LOCAL_RANK,
workers=workers,
image_weights=opt.image_weights,
quad=opt.quad,
prefix=colorstr("train:"),
shuffle=True,
)
labels=np.concatenate(dataset.labels,0)
#獲取標(biāo)簽中最大類別值,與類別數(shù)作比較,如果大于等于類別數(shù)則表示有問題
mlc=int(labels[:,0].max())#maxlabelclass
assertmlc
4.10 DDP mode
#DDPmode
ifcudaandRANK!=-1:
model=smart_DDP(model)
4.11 附加model attributes
#Modelattributes
nl=de_parallel(model).model[-1].nl#numberofdetectionlayers(toscalehyps)
hyp["box"]*=3/nl#scaletolayers
hyp["cls"]*=nc/80*3/nl#scaletoclassesandlayers
hyp["obj"]*=(imgsz/640)**2*3/nl#scaletoimagesizeandlayers
hyp["label_smoothing"]=opt.label_smoothing
model.nc=nc#attachnumberofclassestomodel
model.hyp=hyp#attachhyperparameterstomodel
#從訓(xùn)練樣本標(biāo)簽得到類別權(quán)重(和類別中的目標(biāo)數(shù)即類別頻率成反比)
model.class_weights=labels_to_class_weights(dataset.labels,nc).to(device)*nc#attachclassweights
model.names=names#獲取類別名
4.12 Start training
#Starttraining
t0=time.time()
nb=len(train_loader)#numberofbatches
#獲取預(yù)熱迭代的次數(shù)iterations#numberofwarmupiterations,max(3epochs,1kiterations)
nw=max(round(hyp["warmup_epochs"]*nb),100)#numberofwarmupiterations,max(3epochs,100iterations)
#nw=min(nw,(epochs-start_epoch)/2*nb)#limitwarmupto=accumulate:
#optimizer.step參數(shù)更新
optimizer.step()
#梯度清零
optimizer.zero_grad()
ifema:
#當(dāng)前epoch訓(xùn)練結(jié)束更新ema
ema.update(model)
last_opt_step=ni
#Log
#打印Print一些信息包括當(dāng)前epoch、顯存、損失(box、obj、cls、total)、當(dāng)前batch的target的數(shù)量和圖片的size等信息
ifRANKin{-1,0}:
mloss=(mloss*i+loss_items)/(i+1)#updatemeanlosses
pbar.set_description(("%11s"+"%11.4g"*5)%(f"{epoch}/{epochs-1}",*mloss,targets.shape[0],imgs.shape[-1]))
#endbatch----------------------------------------------------------------
#Scheduler
lr=[x["lr"]forxinoptimizer.param_groups]#forloggers
scheduler.step()
ifRANKin{-1,0}:
#mAP
callbacks.run("on_train_epoch_end",epoch=epoch)
ema.update_attr(model,include=["yaml","nc","hyp","names","stride","class_weights"])
final_epoch=(epoch+1==epochs)orstopper.possible_stop
ifnotnovalorfinal_epoch:#CalculatemAP
#測試使用的是ema(指數(shù)移動平均對模型的參數(shù)做平均)的模型
#results:[1]Precision所有類別的平均precision(最大f1時)
#[1]Recall所有類別的平均recall
#[1]map@0.5所有類別的平均mAP@0.5
#[1]map@0.5:0.95所有類別的平均mAP@0.5:0.95
#[1]box_loss驗證集回歸損失,obj_loss驗證集置信度損失,cls_loss驗證集分類損失
#maps:[80]記錄每一個類別的ap值
results,maps,_=val.run(
data_dict,
batch_size=batch_size//WORLD_SIZE*2,
imgsz=imgsz,
half=amp,
model=ema.ema,
single_cls=single_cls,
dataloader=val_loader,
save_dir=save_dir,
plots=False,
callbacks=callbacks,
compute_loss=compute_loss,
)
#UpdatebestmAP
#fi是我們尋求最大化的值。在YOLOv5中,fitness函數(shù)實現(xiàn)對[P,R,mAP@.5,mAP@.5-.95]指標(biāo)進(jìn)行加權(quán)。
fi=fitness(np.array(results).reshape(1,-1))#weightedcombinationof[P,R,mAP@.5,mAP@.5-.95]
#stop=stopper(epoch=epoch,fitness=fi)#earlystopcheck
iffi>best_fitness:
best_fitness=fi
log_vals=list(mloss)+list(results)+lr
callbacks.run("on_fit_epoch_end",log_vals,epoch,best_fitness,fi)
#Savemodel
if(notnosave)or(final_epochandnotevolve):#ifsave
ckpt={
"epoch":epoch,
"best_fitness":best_fitness,
"model":deepcopy(de_parallel(model)).half(),
"ema":deepcopy(ema.ema).half(),
"updates":ema.updates,
"optimizer":optimizer.state_dict(),
"wandb_id":loggers.wandb.wandb_run.idifloggers.wandbelseNone,
"opt":vars(opt),
"date":datetime.now().isoformat(),
}
#Savelast,bestanddelete
model_save(ckpt,last)#flow.save(ckpt,last)
ifbest_fitness==fi:
model_save(ckpt,best)#flow.save(ckpt,best)
ifopt.save_period>0andepoch%opt.save_period==0:
print("isok")
model_save(ckpt,w/f"epoch{epoch}")#flow.save(ckpt,w/f"epoch{epoch}")
delckpt
#Write將測試結(jié)果寫入result.txt中
callbacks.run("on_model_save",last,epoch,final_epoch,best_fitness,fi)
#endepoch--------------------------------------------------------------------------
#endtraining---------------------------------------------------------------------------
4.13 End
打印一些信息
日志: 打印訓(xùn)練時間、plots可視化訓(xùn)練結(jié)果results1.png、confusion_matrix.png 以及(‘F1’, ‘PR’, ‘P’, ‘R’)曲線變化 、日志信息
通過調(diào)用val.run() 方法驗證在 coco數(shù)據(jù)集上 模型準(zhǔn)確性 + 釋放顯存
Validate a model's accuracy on COCO val or test-dev datasets. Note that pycocotools metrics may be ~1% better than the equivalent repo metrics, as is visible below, due to slight differences in mAP computation.
ifRANKin{-1,0}:
LOGGER.info(f"
{epoch-start_epoch+1}epochscompletedin{(time.time()-t0)/3600:.3f}hours")
forfinlast,best:
iff.exists():
strip_optimizer(f)#stripoptimizers
iffisbest:
LOGGER.info(f"
Validating{f}...")
results,_,_=val.run(
data_dict,
batch_size=batch_size//WORLD_SIZE*2,
imgsz=imgsz,
model=attempt_load(f,device).half(),
iou_thres=0.65ifis_cocoelse0.60,#bestpycocotoolsresultsat0.65
single_cls=single_cls,
dataloader=val_loader,
save_dir=save_dir,
save_json=is_coco,
verbose=True,
plots=plots,
callbacks=callbacks,
compute_loss=compute_loss,
)#valbestmodelwithplots
callbacks.run("on_train_end",last,best,plots,epoch,results)
flow.cuda.empty_cache()
return
5 run函數(shù)
封裝train接口 支持函數(shù)調(diào)用執(zhí)行這個train.py腳本
defrun(**kwargs):
#Usage:importtrain;train.run(data='coco128.yaml',imgsz=320,weights='yolov5m')
opt=parse_opt(True)
fork,vinkwargs.items():
setattr(opt,k,v)#給opt添加屬性
main(opt)
returnopt
6 啟動訓(xùn)練時效果展示
審核編輯:湯梓紅
-
代碼
+關(guān)注
關(guān)注
30文章
4819瀏覽量
68878 -
Batch
+關(guān)注
關(guān)注
0文章
6瀏覽量
7168 -
腳本
+關(guān)注
關(guān)注
1文章
391瀏覽量
14916
原文標(biāo)題:《YOLOv5全面解析教程》九,train.py 逐代碼解析
文章出處:【微信號:GiantPandaCV,微信公眾號:GiantPandaCV】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
【YOLOv5】LabVIEW+YOLOv5快速實現(xiàn)實時物體識別(Object Detection)含源碼
Yolov5算法解讀
龍哥手把手教你學(xué)視覺-深度學(xué)習(xí)YOLOV5篇
怎樣使用PyTorch Hub去加載YOLOv5模型
YOLOv5網(wǎng)絡(luò)結(jié)構(gòu)解析
YOLOv5全面解析教程之目標(biāo)檢測模型精確度評估
使用Yolov5 - i.MX8MP進(jìn)行NPU錯誤檢測是什么原因?
如何YOLOv5測試代碼?
yolov5模型onnx轉(zhuǎn)bmodel無法識別出結(jié)果如何解決?
基于YOLOv5的目標(biāo)檢測文檔進(jìn)行的時候出錯如何解決?
YOLOv5全面解析教程:計算mAP用到的numpy函數(shù)詳解
YOLOv5解析之downloads.py 代碼示例
使用旭日X3派的BPU部署Yolov5

YOLOv8+OpenCV實現(xiàn)DM碼定位檢測與解析
yolov5和YOLOX正負(fù)樣本分配策略






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論