") 介紹一種模塊化多模式架構(gòu)DeepFusion
介紹一種模塊化多模式架構(gòu)DeepFusion
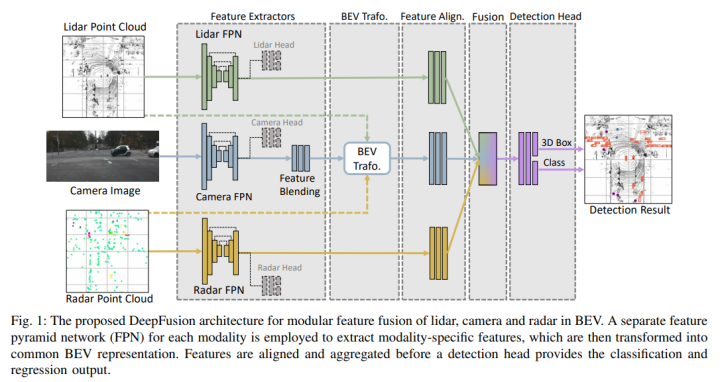
作者提出了DeepFusion,這是一種模塊化多模式架構(gòu),可將激光雷達、相機和radar以不同的組合融合在一起,用于3D目標(biāo)檢測。專有的特征提取器利用了每種模式,并且可以輕松地交換,使得方法簡單靈活,提取的特征被轉(zhuǎn)換為鳥瞰圖,作為融合的通用表示,并在特征空間中融合模態(tài)之前執(zhí)行空間和語義對齊。
最后,檢測頭利用豐富的多模態(tài)特征來提高3D檢測性能。激光雷達相機、激光雷達相機雷達和相機雷達融合的實驗結(jié)果表明了該融合方法的靈活性和有效性,在這個過程中,作者還研究了遠至225米遠的車輛檢測這一基本上未被探索的任務(wù),展示了本文的激光雷達聚變的好處。此外還研究了3D目標(biāo)檢測所需的激光雷達點密度,并舉例說明了對不利天氣條件的魯棒性,對相機雷達融合的消融研究突出了精確深度估計的重要性。
領(lǐng)域背景
安全準確的3D目標(biāo)檢測是自主駕駛的核心技術(shù),所有后續(xù)組件(如跟蹤、預(yù)測和規(guī)劃)在很大程度上取決于檢測性能,其它交通參與者的感知錯誤可能會通過系統(tǒng)傳播,導(dǎo)致自動駕駛車輛嚴重故障。為了防止這種錯誤,感知系統(tǒng)需要仔細設(shè)計,這仍然是一個具有挑戰(zhàn)性的研究問題。多個傳感器和不同的模態(tài),主要是激光雷達、RGB相機和雷達,通常用于應(yīng)對這一目標(biāo)檢測挑戰(zhàn)。
多個傳感器提高了系統(tǒng)冗余度,但不同的模態(tài)提高了檢測魯棒性,因為它們的互補物理特性可用于克服單一模態(tài)失效的不同駕駛場景。例如,激光雷達和相機在多霧天氣條件下會嚴重退化,而雷達則相對不受影響。另一方面,雷達和單目相機存在稀疏或不精確的深度估計,這可以通過密集和精確的激光雷達點云進行補償。
在過去的幾年中,利用激光雷達、camera、雷達進行3D目標(biāo)檢測的任務(wù)取得了巨大進展,這一趨勢由公共大規(guī)模多模態(tài)數(shù)據(jù)集推動,如nuScenes和Waymo開放數(shù)據(jù)集。然而,研究界主要關(guān)注距離達75米的近距離3D物體檢測,本問主要強調(diào)遠距離物體檢測的重要性,因為對其他交通參與者及其行為的早期檢測可以實現(xiàn)更安全、更快、更平穩(wěn)的整體系統(tǒng)反應(yīng),尤其是在高速公路場景中。
因此,本文的目標(biāo)是一種可擴展到200米范圍以上的目標(biāo)檢測器設(shè)計,使用多個傳感器和模態(tài)的主要挑戰(zhàn)是融合大量冗余和互補的傳感器數(shù)據(jù),在多個傳感器與感知輸出的接口處,融合對整個系統(tǒng)的性能有著重要的影響。大多數(shù)現(xiàn)有的工作集中在融合激光雷達和RGB相機傳感器用于3D目標(biāo)檢測[8]、[17]–[24]。
較少探索的是相機雷達融合[25]–[27]和激光雷達雷達融合[28]、[29],后者分別用于語義熱圖預(yù)測和2D目標(biāo)檢測。作者認為有必要為3D目標(biāo)檢測開發(fā)一個簡單而靈活的激光雷達-camera-radar融合網(wǎng)絡(luò),因為雷達傳感器在測量原理上與激光雷達和camera互補,雷達技術(shù)隨著市場需求的增長而迅速發(fā)展。
作者提出了一種模塊化網(wǎng)絡(luò)架構(gòu),用于融合激光雷達、相機和雷達,以實現(xiàn)精確、穩(wěn)健和遠距離的3D物體檢測。該方法采用可交換的特征提取器,以產(chǎn)生單模態(tài)檢測器的良好優(yōu)化架構(gòu)。提取出的每種模態(tài)的豐富特征然后被轉(zhuǎn)換為一個共同的鳥瞰圖表示,以便在共享的潛在空間中進行方便的融合。這種網(wǎng)絡(luò)設(shè)計使我們能夠輕松地研究不同模態(tài)組合的融合,重點是激光雷達相機、激光雷達相機雷達和相機雷達融合。
多模態(tài)融合的方法
RGB相機圖像捕捉物體的詳細紋理信息,廣泛應(yīng)用于物體分類,然而,camera不能直接提供深度信息,這使得3D視覺任務(wù)具有挑戰(zhàn)性,尤其是在單攝像機設(shè)置下。雷達點提供方位角速度和徑向距離,這有助于定位動態(tài)目標(biāo)。雷達對各種照明和天氣條件也具有魯棒性,然而,使用雷達的3D目標(biāo)檢測受到低分辨率和錯誤的高程估計的限制。
激光雷達點提供了周圍環(huán)境的準確深度信息,與分別具有錯誤深度估計或稀疏度的相機圖像或雷達點相比,激光雷達點在3D空間中具有更高的目標(biāo)細節(jié)分辨率。因此,許多3D目標(biāo)檢測benchmark(如KITTI或nuScenes)都由基于激光雷達的解決方案。
RGB相機和激光雷達是文獻中最常見的融合傳感器,此外,[35]將RGB圖像與熱圖像相結(jié)合,[36]將激光雷達點云與高清地圖相結(jié)合,最近越來越多的作品將RGB相機圖像與雷達相結(jié)合[25]–[27],只有[28]提出了融合激光雷達、雷達和RGB圖像的通用框架。最先進的融合網(wǎng)絡(luò)遵循兩級([8],[17]–[19],[21],[24],[36])或一級目標(biāo)檢測pipeline([20],[22],[25],[37])。
例如,MV3D提出了一種具有RGB圖像和激光雷達點的兩級目標(biāo)檢測器,在第一階段,相機圖像和激光雷達點由傳感器專用網(wǎng)絡(luò)處理,以提取高級特征。激光雷達分支還生成region proposal,以便裁剪激光雷達和相機特征圖。在第二階段,通過一個小檢測頭融合裁剪的特征。AVOD通過融合第一和第二階段的特征來擴展MV3D,3DCVF[23]應(yīng)用選通機制來學(xué)習(xí)每個模態(tài)的權(quán)重,MMF[36]向融合管道添加了額外的任務(wù),例如圖像深度補全和地面估計。
Frustum PointNet使用預(yù)先訓(xùn)練的圖像檢測器在3D空間中生成2D目標(biāo)proposal和截頭體,并應(yīng)用PointNet使用截頭體內(nèi)的激光雷達點進行目標(biāo)檢測。在一級pipelines中,傳感器可以在一個特定層[22]、[25]或多個層[20]、[37]處融合。例如,PointPainting[22]應(yīng)用預(yù)先訓(xùn)練的語義分割網(wǎng)絡(luò)來預(yù)測逐像素圖像語義,并將語義得分附加到相應(yīng)的激光雷達點,以進一步進行3D目標(biāo)檢測。ContFuse[20]通過連續(xù)的融合層逐漸融合相機和激光雷達分支的特征圖!
Deepfusion框架
圖1所示的模塊化和靈活的架構(gòu)設(shè)計基于強大的特征提取器,用于對單模態(tài)輸入數(shù)據(jù)進行豐富的編碼。鳥瞰圖(BEV)轉(zhuǎn)換模塊將這些特征映射到公共表示空間中。在BEV表示中,目標(biāo)的大小被很好地保留,具有較小的方差和遮擋,因此非常適合3D目標(biāo)檢測。接下來,特征對齊模塊在融合模塊聚集之前,對齊模態(tài)之間的潛在表示。最后,基于融合特征的檢測頭為3D目標(biāo)檢測提供分類和回歸輸出。
1) Feature Extractors
對于每種模態(tài)(激光雷達、相機和雷達),都有一個單獨的目標(biāo)檢測器可用于從各自的輸入數(shù)據(jù)中提取特征。為此,使用了經(jīng)過充分研究的2D-CNN架構(gòu),因為它們的密集2D輸出具有豐富的細節(jié)。目標(biāo)檢測器由提取多尺度特征圖的特征金字塔網(wǎng)絡(luò)(FPN)和用于分類和box回歸輸出的檢測頭組成。FPN用作融合的特征提取器,而檢測頭用于預(yù)訓(xùn)練和端到端訓(xùn)練設(shè)置中的 axillary loss。
2)Camera FPN
camera傳感器向camera FPN提供具有高度H和寬度W的形狀(H、W、3)的RGB圖像I作為輸入。首先,F(xiàn)PN提取多尺度特征圖,之后,這些特征圖是線性的 被放大到公共尺度Z、被級聯(lián)并由多個卷積層處理以用于多尺度特征混合。輸出為形狀(ZH、ZW、K)的高質(zhì)量特征FC,其中K為通道數(shù)。
3)Lidar/Radar FPN
根據(jù)PIXOR[9],激光雷達和雷達點云由鳥瞰圖(BEV)平面上的占用網(wǎng)格圖表示,用于特征提取,網(wǎng)格大小為高度X和寬度Y。FPN通過向下縮放和隨后向上縮放該表示來利用2D卷積處理輸入網(wǎng)格以提取特征。這些BEV特征圖用作各個分支的潛在表示,稍后在特征對齊模塊中進行處理。
4)BEV Transformation
來自特征提取器的潛在表示被轉(zhuǎn)換為通用空間表示的鳥瞰圖,激光雷達和雷達特征已經(jīng)在BEV空間中表示,而相機特征需要圖像到BEV的轉(zhuǎn)換。對于這種轉(zhuǎn)換,文獻中有不同的方法,可以根據(jù)輸入表示進行分類。像OFT[41]和[42]這樣的僅使用相機的方法通過估計深度,將垂直pillar合并到BEV表示中,將圖像投射到3D中。
結(jié)果是密集的深度,但由于單相機的深度估計不準確,空間不精確。點云方法[20]、[22]、[36]、[43]需要3D點云(最好是來自激光雷達傳感器)來指導(dǎo)變換,利用已知的激光雷達和攝像機之間的傳感器標(biāo)定,將每個點投影到相機圖像和BEV網(wǎng)格上,在圖像像素和BEV單元之間建立特征關(guān)聯(lián)。由于點云的稀疏性,其結(jié)果是稀疏的表示,但由于激光雷達測量的深度精度,其空間精確。
DeepFusion使用了[43]中的點云驅(qū)動方法,因為空間精度對于3D目標(biāo)檢測非常重要。此外,任何傳感器模態(tài)都可以用于為圖像變換提供點云:激光雷達或者直接使用雷達點進行變換,并且對于相機圖像,使用來自圖像檢測器的目標(biāo)中心預(yù)測作為稀疏偽點。
在融合過程中,來自激光雷達、雷達和攝像機的點云可以被聚合,使得融合對于一種傳感器的故障具有魯棒性。如果將多個相機特征投影到同一BEV網(wǎng)格單元上,可以使用均值池來合并它們。結(jié)果,形狀的圖像特征圖被轉(zhuǎn)換為BEV平面,從而展開具有形狀的特征圖。
5)Feature Alignment
特征對齊模塊的輸入是來自激光雷達和雷達FPN的密集占用BEV特征圖和,以及來自相機的稀疏占用的變換特征圖,因此這些是不同的空間表示。此外,這些特征圖來自不同的模態(tài)和FPN主干,并編碼不同的語義表示。在這方面,由幾個卷積層組成的特征對齊模塊分別應(yīng)用于,以便在空間和語義上對齊各個表示。輸出為特征圖具有相同形狀()。
6)Fusion
融合模塊接收作為分別來自激光雷達、相機和雷達分支的對準特征圖,融合模塊的任務(wù)是在潛在空間中組合這些不同的模態(tài)。為了得到融合特征圖,融合應(yīng)用操作ρ,它可以是固定操作,如池化或加權(quán)平均,也可以是可學(xué)習(xí)操作,如注意力。模塊的輸出是形狀()和比例S的融合特征圖F。
7)檢測頭
檢測頭接收融合特征圖F以生成3D邊界框的分類和回歸輸出。由于特征圖F中編碼了豐富的多模態(tài)特征,作者發(fā)現(xiàn)一個帶有幾個卷積層的小頭部就足以生成比單模態(tài)檢測器更精確、更健壯的3D目標(biāo)。
實驗
作者進行了詳細的實驗來研究每個傳感器模態(tài)的特性,并驗證所提出的融合架構(gòu)。第V-B節(jié)比較了傳感器特定檢測器和不同融合組合之間的檢測性能,隨后是第V-C節(jié)中的一些定性結(jié)果。第V-D節(jié)顯示了主要針對LC、LCR和CR融合方案的消融研究,包括天氣條件好/壞、點的數(shù)量、探測距離以及225米遠目標(biāo)的探測性能。最后,第V-E節(jié)在具有挑戰(zhàn)性的nuScenes數(shù)據(jù)集上對本文的融合網(wǎng)絡(luò)進行了基準測試。
1)實驗設(shè)置
實驗主要是在作者內(nèi)部的多模態(tài)博世數(shù)據(jù)集上進行的,這些數(shù)據(jù)集包括來自多個激光雷達、相機和雷達的記錄。數(shù)據(jù)記錄在歐洲幾個國家(主要城市、農(nóng)村地區(qū)和高速公路)和不同天氣條件(晴天、雨天、多云)。目標(biāo)被分為17類,并用3D邊界框標(biāo)記,這項工作使用了博世數(shù)據(jù)集的一個子集,包括大約10k個訓(xùn)練幀(訓(xùn)練集)和3k個驗證幀(驗證集)。
此外還使用公共nuScenes數(shù)據(jù)集[3]對本文的該方法與其他最先進的目標(biāo)檢測器相結(jié)合。該數(shù)據(jù)集是在波士頓和新加坡用激光雷達、攝像機和雷達的讀數(shù)采集的。遵循nuScenes目標(biāo)檢測基準,使用標(biāo)準平均精度(AP)度量來評估3D檢測。AP得分在[0%,100%]范圍內(nèi),值越大表示檢測性能越好。
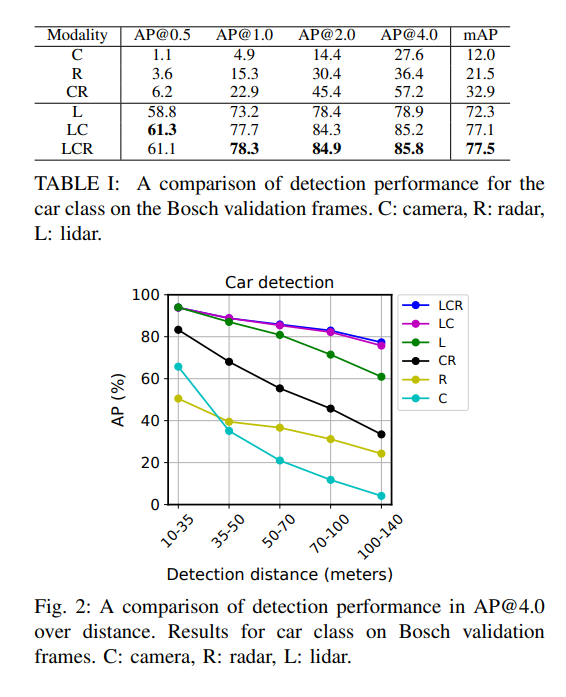
論文報告了具有不同定位閾值的AP及其在所有閾值上的平均值(mAP),定位閾值由檢測與其gt(0.5、1.0、2.0、4.0米)之間的邊界框質(zhì)心的歐氏距離定義。所有檢測均在140米范圍內(nèi)進行評估,作者分析了汽車或行人對象的檢測性能,這是自動駕駛研究中的兩個主要目標(biāo)類別。對于消融研究,使用寬松的定位閾值(4.0米),以便補償不同傳感器中的時間偏差的影響,特別是在遠距離和動態(tài)對象中。
2)檢測性能的一般比較
作者比較了幾種傳感器特定檢測器(C、R、L)和具有不同傳感器組合(CR、LC、LCR)的融合網(wǎng)絡(luò)的性能。表I顯示了不同位置閾值下車輛等級的AP得分及其平均得分(mAP)。該表顯示了與傳感器專用網(wǎng)絡(luò)相比,傳感器融合明顯改善了AP。CR分別比C和R提高了20%和10%以上的mAP,LC提高了5%的mAP。LCR融合了所有傳感器模態(tài),實現(xiàn)了最佳的檢測性能,這些實驗結(jié)果驗證了提出的融合架構(gòu)的有效性。
為了研究每個傳感器模態(tài)的特性,圖2顯示了4.0米定位閾值下AP得分相對于檢測范圍的演變。帶有激光雷達點(L、LC、LCR)的檢測器性能優(yōu)于沒有激光雷達點的檢測器(C、R、CR),且有較大的余量。例如,L在距離100~140米時超過CR 20%AP,顯示了使用激光雷達點進行遠程探測的重要性。
此外,LC在更大的距離上提高了L,接近20%的AP。作者假設(shè)這是因為相機圖像提供的目標(biāo)紋理特征有助于檢測,特別是當(dāng)激光雷達點在遠距離變得稀疏時。最后,當(dāng)比較LCR和LC時,作者觀察到1%的AP略微改善,這表明雷達編碼的某些目標(biāo)特征與相機和激光雷達的目標(biāo)特征互補,例如速度。
3)定性結(jié)果
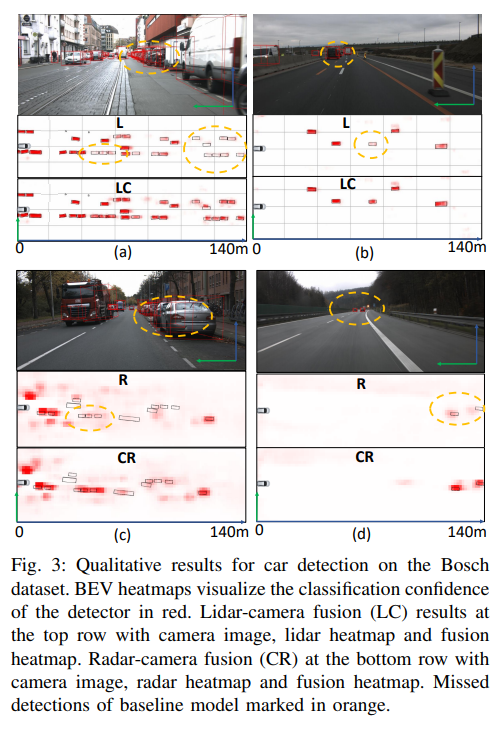
圖3顯示了論文在Bosch數(shù)據(jù)集上用于車輛檢測的LC和CR融合模型的定性結(jié)果,通過可視化非最大抑制前的目標(biāo)熱圖,比較了融合和相應(yīng)的單峰基線模型。紅色表示車輛目標(biāo)的高度可信度。融合模型能夠可靠地檢測到橙色突出顯示的基線模型遺漏對象。圖3(a)和圖3(b)顯示了帶有相機圖像的LC結(jié)果、基線L的熱圖和LC的熱圖。
在(a)中,LC能夠檢測到具有高遮擋水平的停放車輛,這是L模型所缺少的。在(b)中,LC在高速公路上檢測到一輛高度閉塞的汽車,這在僅使用激光雷達的模型中顯示出較低的得分。圖3(c)和圖3(d)顯示了相機圖像的CR融合結(jié)果、基線R的熱圖和CR模型的熱圖。在(c)中,沒有檢測到停放的車輛,因為部分遮擋的靜態(tài)物體對雷達來說特別困難,而與攝像機融合則能夠檢測到它們,在(d)雷達對遠距離目標(biāo)的斗爭中,CR融合可靠地檢測到這些目標(biāo)。
4)詳細分析和消融研究
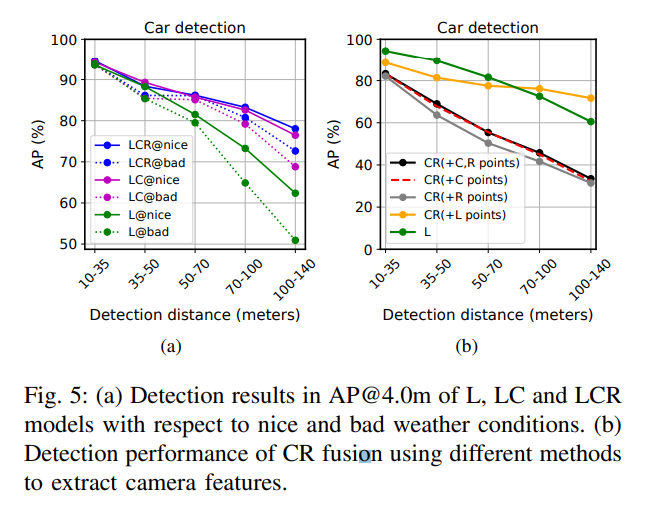
1) LCR融合:作者研究了天氣條件對LCR融合的影響。為此,博世數(shù)據(jù)集的驗證集被分為晴天集(晴天或陰天,道路干燥)和惡劣天氣集(雨天,道路潮濕)。基于激光雷達的模型L、LC和LCR根據(jù)這些分割進行評估。圖5(a)顯示了具有4.0米閾值的汽車等級的AP得分。
在惡劣的天氣條件下,每種型號的性能都會隨著距離的增加。模型L的性能差距最大,AP下降11%(范圍為100?140米)。為了進一步量化這種nicebad gap,論文使用mRAPD metric作為對壞天氣條件的魯棒性度量。它通過壞天氣相對于好天氣中的差A(yù)P平均值在D距離區(qū)間上平均計算得出:
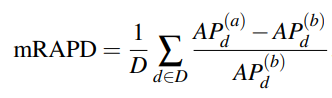
使用mRAPD度量,作者發(fā)現(xiàn)僅使用激光雷達的模型L在壞天氣下減少7.1%mRAPD。這是因為雨天會降低點云質(zhì)量,減少每個目標(biāo)的點數(shù),從而導(dǎo)致“缺失點問題”。由于沒有互補傳感器,模型L無法補償減少激光雷達點的信息損失。在這種情況下,與相機圖像的融合彌補了“缺失點問題”,只減少了4.0%mRAPD、
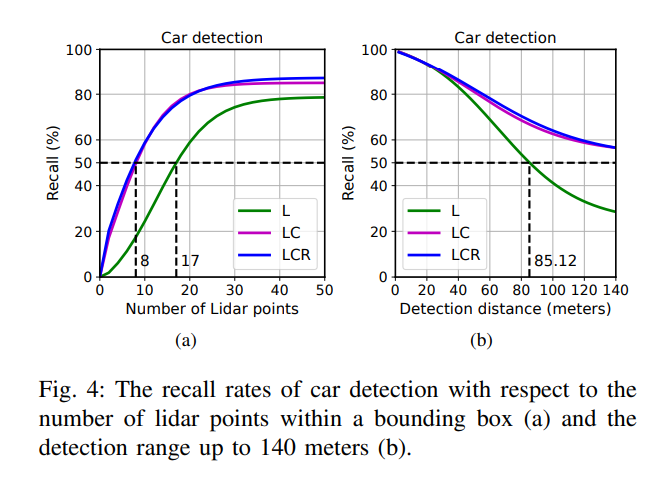
對于LC模型。LCR模型對天氣條件最為穩(wěn)健減少2.7%mRAPD,因為雷達比激光雷達或相機受雨天影響小,論文進一步研究了LCR融合在激光雷達點密度和檢測距離方面的性能,對L、LC和LCR模型進行了比較,圖4(a)和圖4(b)分別顯示了汽車檢測的召回率與邊界框內(nèi)激光雷達點的數(shù)量和140米內(nèi)的檢測范圍有關(guān)。
與僅使用激光雷達的網(wǎng)絡(luò)相比,將激光雷達點與相機圖像融合顯著提高了召回率。盡管L型激光雷達使用17次以上的激光雷達觀測且85米探測范圍內(nèi)的召回率達到50%以上,但LC型激光雷達只需要8個激光雷達點,即使在140米處,召回率也保持在近60%。在相同的激光雷達密度或探測距離下,LCR略微提高了1%的召回率。
2) CR融合:當(dāng)執(zhí)行相機-雷達融合(CR)時,使用雷達觀測(R點)的3D位置和相機分支網(wǎng)絡(luò)(C點)預(yù)測的3D物體質(zhì)心來提取相機特征。那些camera特征被重新投影到BEV平面上,以便與雷達特征進行融合,因此,融合性能高度依賴于3D點的“質(zhì)量”。
本消融研究評估了用于CR融合的3D點的原點的影響,在推理過程中,根據(jù)用R點和C點(C,R點)訓(xùn)練的CR模型,交替使用點類型將相機特征投影到BEV網(wǎng)格上。作者將使用C和R點“CR(+C,R點)”的推理與使用C點“CR”(+C點)或R點“CR+R點”的推理進行比較。
此外還測試了使用激光雷達點位置(L點)提取相機特征時CR融合的性能,稱為“CR(+L點)”,它作為CR融合的上限,假設(shè)C和R點可以匹配L點的密度和精度。最后使用激光雷達專用探測器“L”作為基準,結(jié)果如圖5(b)所示。從圖中可以看出C點在CR融合中的重要性:“CR(+C點)”比“CR(+R點)”高出5%的AP,并且在C點之外加上R點并不能改善融合,正如“CR(+2點)”和“CR(+3點,R點))”之間的類似性能所示。一個原因可能是C點可以用有用的相機特征捕捉更多的物體位置,而R點的位置不準確或由于測量誤差和遮擋而丟失。
此外,將“CR(+L點)”與其他CR模型進行比較,論文觀察到高達40%AP的顯著性能提升。“CR(+L點)”甚至在距離大于70米的情況下優(yōu)于僅使用激光雷達的檢測器,盡管它是在沒有任何激光雷達點的情況下訓(xùn)練的。結(jié)果表明,在提取相機特征時,準確和密集的3D位置非常重要。
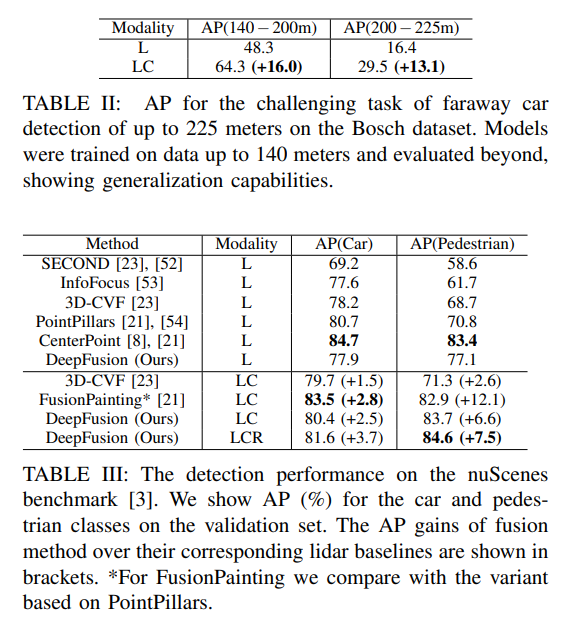
3) 遠距離物體檢測:表II比較了用于遠距離汽車檢測的L和LC模型。盡管這兩個模型的訓(xùn)練距離都只有140米,但所提出的融合架構(gòu)不斷改進訓(xùn)練范圍之外的僅使用激光雷達的檢測器,并在200米以上達到近30%的AP,結(jié)果驗證了該模型的長期可擴展性。
4)nuScenes數(shù)據(jù)集上評估
作者基于具有挑戰(zhàn)性的nuScenes基準對基于激光雷達的模型進行了評估,用于3D目標(biāo)檢測。由于根據(jù)預(yù)訓(xùn)練規(guī)則,在COCO上訓(xùn)練的MaskRCNN網(wǎng)絡(luò)不允許出現(xiàn)在nuScenes檢測排行榜中,因此作者使用輕量級的EfficientNetB0架構(gòu),并將來自ImageNet的預(yù)訓(xùn)練權(quán)重作為camera backbone。
此外,在將輸入圖像輸入到模型中之前,將輸入圖像從原生分辨率1600×900縮小到576×256。論文發(fā)現(xiàn)這種分辨率足以在減少推理時間的情況下獲得良好的融合結(jié)果。由于激光雷達和雷達點在數(shù)據(jù)集中非常稀疏,論文遵循nuScenes的常見做法,為論文的模型聚合多達10個激光雷達掃描和多達7個雷達掃描,并進行自我運動補償,聚集的激光雷達掃描用于當(dāng)前相機圖像的BEV變換。作者還比較了融合方法的激光雷達基線性能,為此,使用了nuScenes驗證分割,因為相關(guān)論文報告了它們的激光雷達基線性能。
表III比較了nuScenes驗證集上汽車和行人等級的AP得分,論文將重點放在這兩個最有代表性的層級上,以排除[51]中研究的明顯的層級不平衡問題的影響。憑借77.9和77.1的汽車和行人檢測AP,論文的PointPillar類激光雷達模型(L)提供了堅實的基線。
將激光雷達點與相機圖像(LC模型)融合,分別提高了車輛和行人類別的激光雷達模型(L)的+2.5%AP和+6.6%AP得分,這表明了相機圖像紋理特征的重要性,尤其是在檢測小物體時。激光雷達相機雷達模型(LCR)獲得了最佳結(jié)果,與激光雷達模型(L)相比,AP增益分別為+3.7%和+7.5%,驗證了論文的融合設(shè)計有效性。
審核編輯:劉清
-
傳感器
+關(guān)注
關(guān)注
2552文章
51359瀏覽量
755648 -
檢測器
+關(guān)注
關(guān)注
1文章
869瀏覽量
47752 -
RGB
+關(guān)注
關(guān)注
4文章
801瀏覽量
58626 -
激光雷達
+關(guān)注
關(guān)注
968文章
4020瀏覽量
190220
原文標(biāo)題:超過200米!多傳感器融合新基線DeepFusion:一個魯棒的LiDAR-相機-Radar融合3D檢測器
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
原理圖模塊化,BOM 物料位號處理
華為預(yù)制模塊化數(shù)據(jù)中心連續(xù)十年蟬聯(lián)全球第一
模塊化示波器的技術(shù)原理和應(yīng)用
模塊化儀器的技術(shù)原理和應(yīng)用場景
即插即用DAQ設(shè)備與模塊化DAQ系統(tǒng)的概念解析

模塊化插座接線方法有哪些
RISC--V架構(gòu)的目標(biāo)和特點
安波福模塊化連接器的優(yōu)勢
耐世特推出全新mPEPS系統(tǒng),為所有EPS架構(gòu)提供模塊化選項
模塊化不間斷電源和傳統(tǒng)差距,安裝位置方面

單片機常用的九大軟件架構(gòu)盤點

機房升級必備神器:模塊化精密空調(diào)的五大超能力!





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論