 工藝對象的方式進行驅動的基本定位器功能
工藝對象的方式進行驅動的基本定位器功能
通過工藝對象的方式進行驅動的基本定位器功能,驅動工藝對象的使用說明如下。
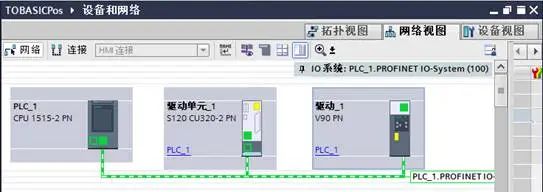
(1) 新建博途項目,添加1500PLC,組態與驅動的網絡連接
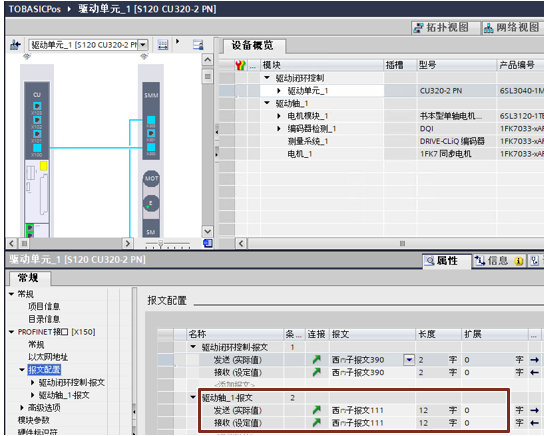
(2) 配置驅動的通信報文為111
示例1. V90 PN的設置

示例2. S120的設置
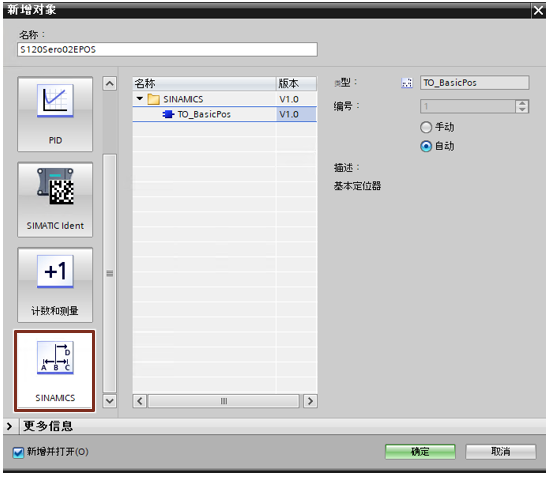
(3) 雙擊“工藝對象”中的“新增對象”,在彈出的畫面中選擇“SINAMICS”
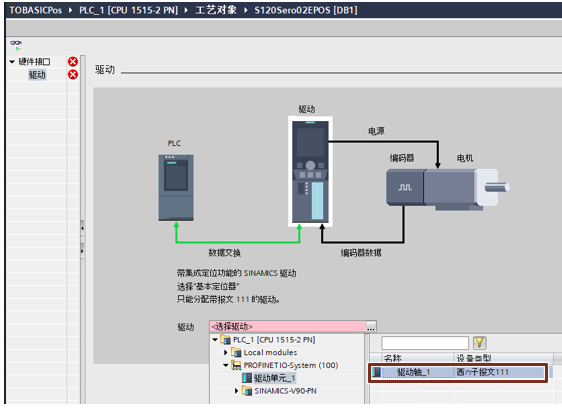
(4) 為工藝對象配置驅動,本示例選擇S120中的驅動軸_1
(5) 在程序塊中調用“TO_BasicPos”命令來實現驅動的基本定位功能控制
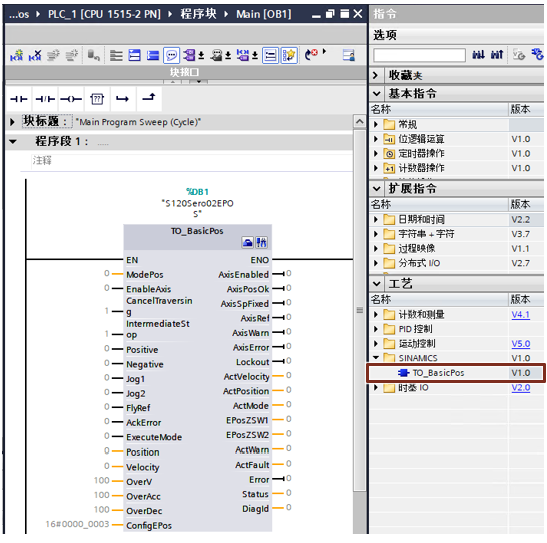
二、TO_BasicPos功能塊介紹
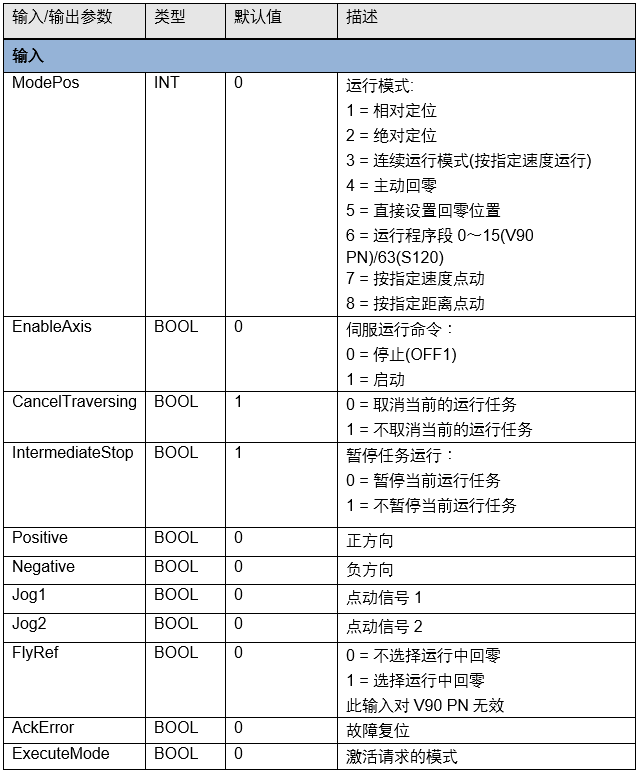
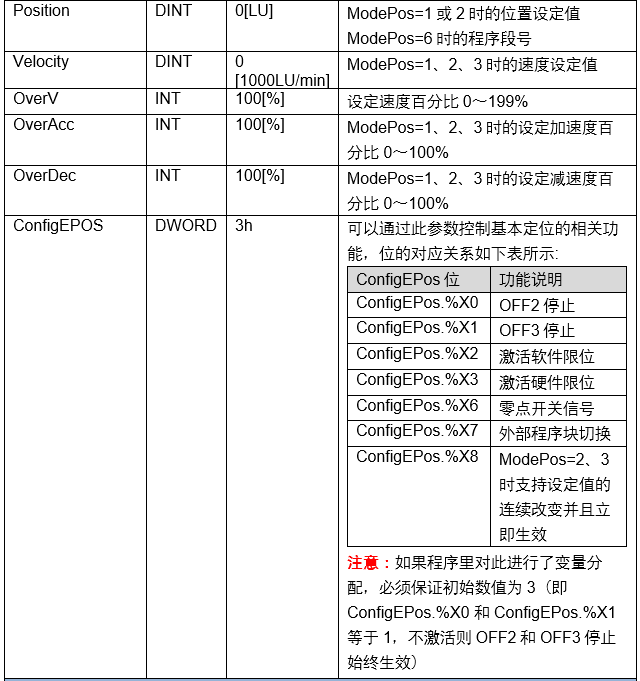
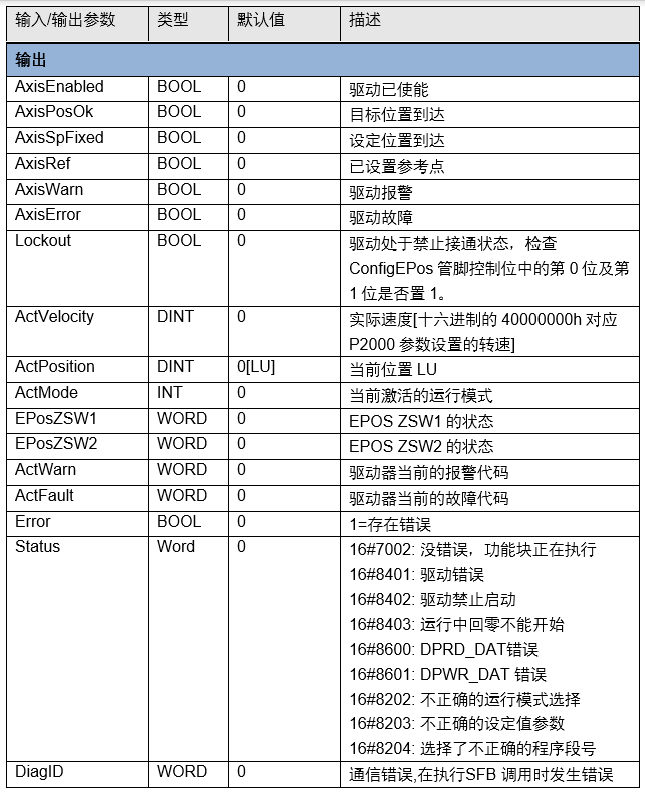
TO_BasicPos功能塊輸入/輸出參數說明見表2-1。
表2-1 TO_BasicPos功能塊輸入/輸出參數說明:
三、特別說明
【延伸閱讀】博途V17到底增加了什么新功能?
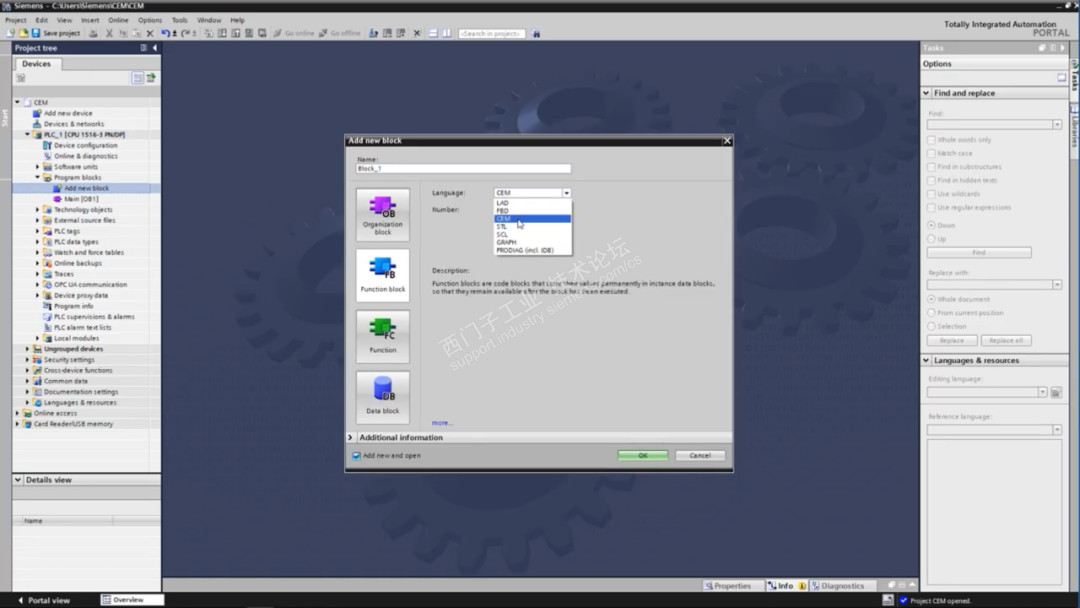
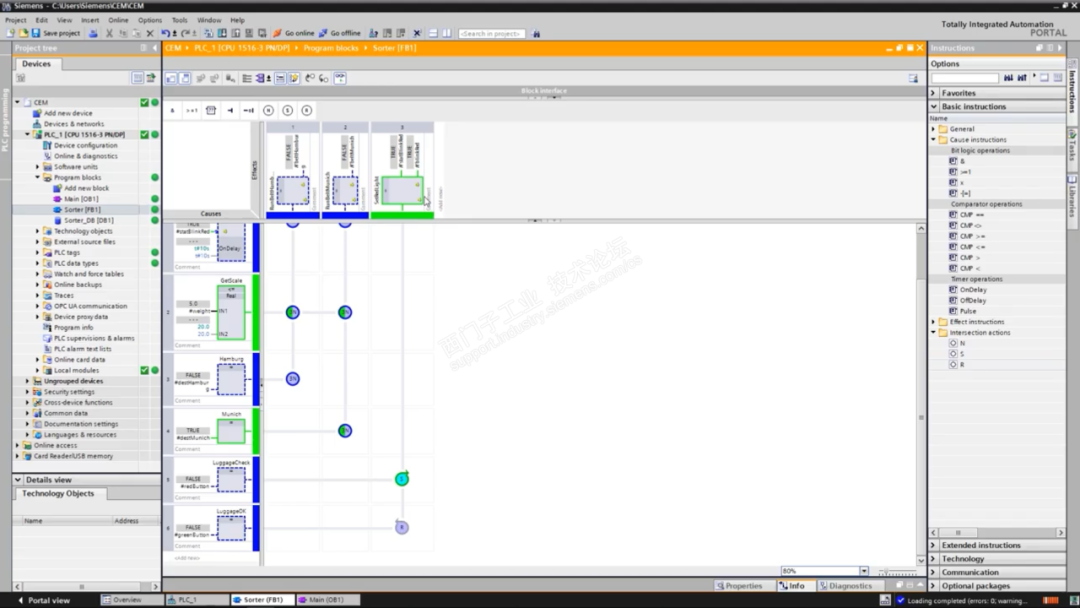
(1)新添加兩個編輯器CFC和CME用于以圖形化配置的方式設計控制程序。S7-1500支持CFC和CME編輯器,S7-1200支持CME編輯器。圖形化的配置界面,可以使機器設備之間的邏輯關系簡單明了,一目了然。這對于從事于過程控制的同學們是一個福音。CEM意為因果矩陣,連接不同的因,對應不同的果。使用一個矩陣,開發人員可以根據因果關系的原則配置模塊之間的依賴關系。下面一起來看看CEM的基本風格和界面。
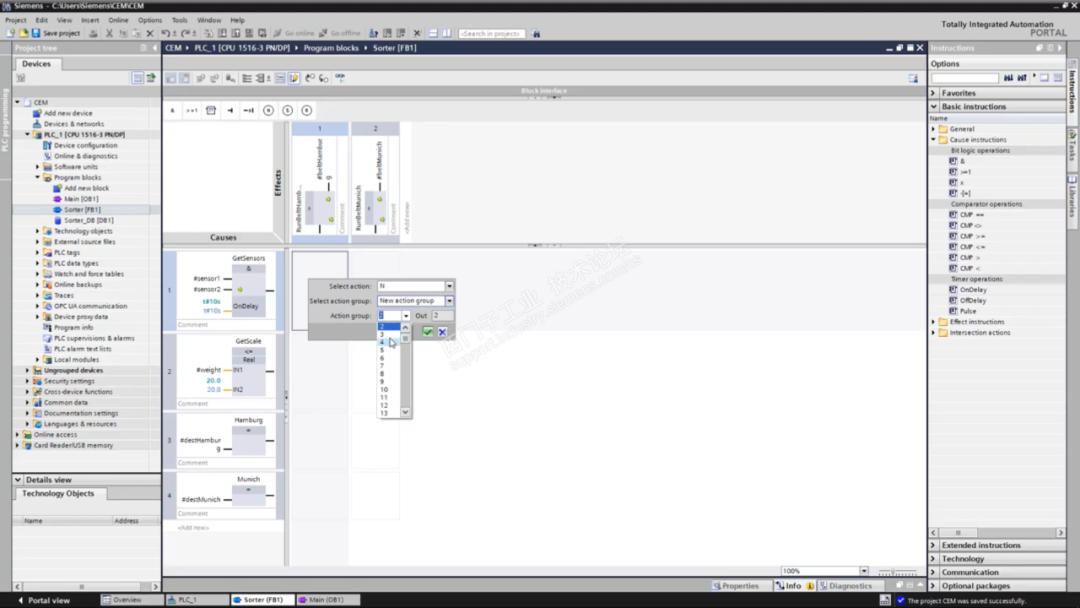
CEM集成在FB選項中
豎對應著causes,橫對應著effects
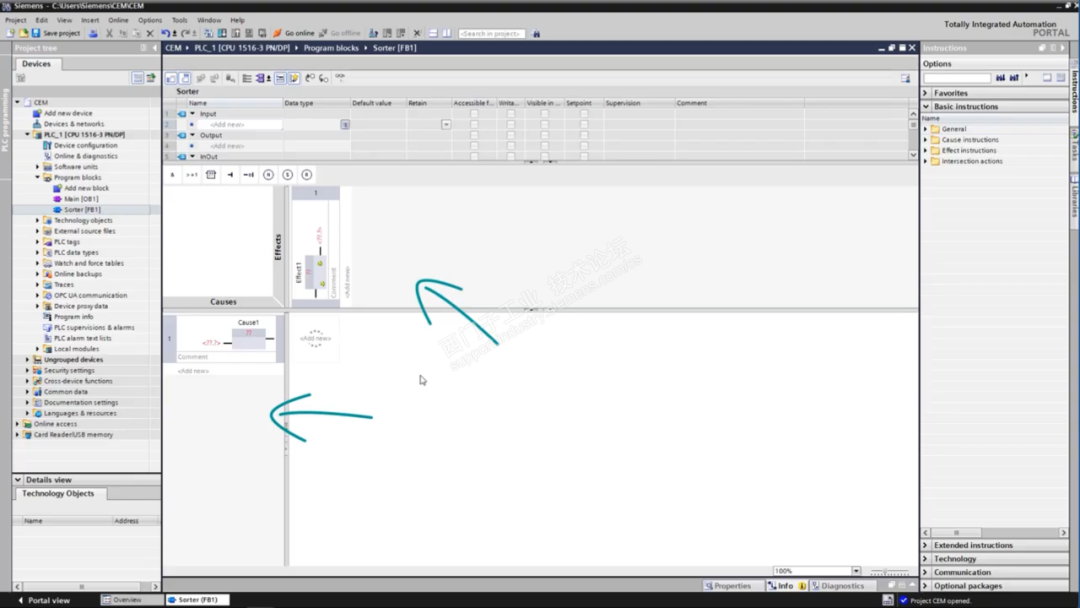
編程指令是FBD指令,有基本的與或非,比較指令,還有延時指令。
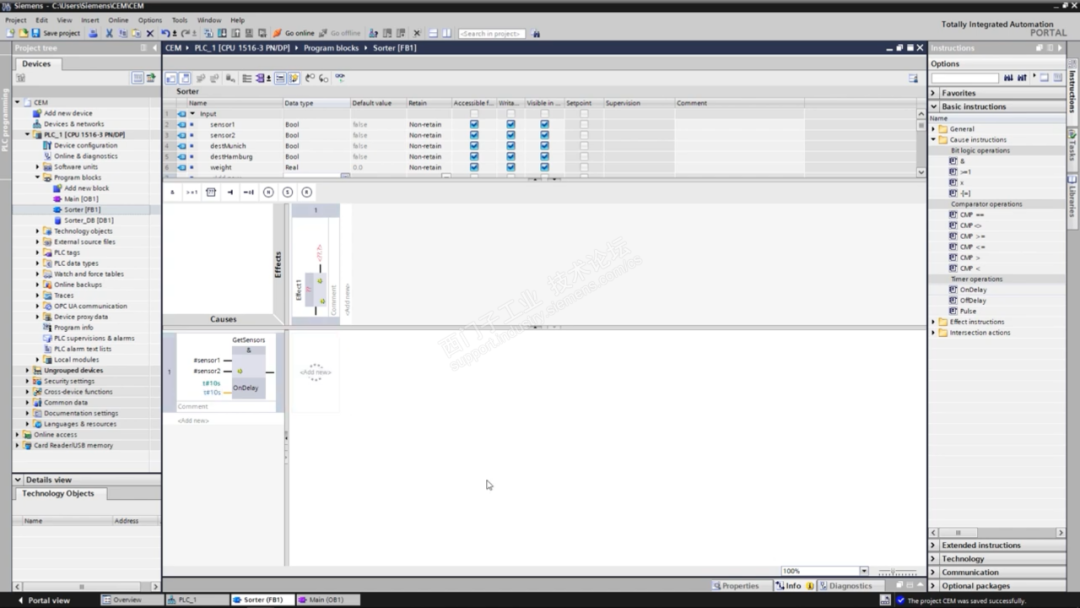
動作類似于Graph,有N S R。
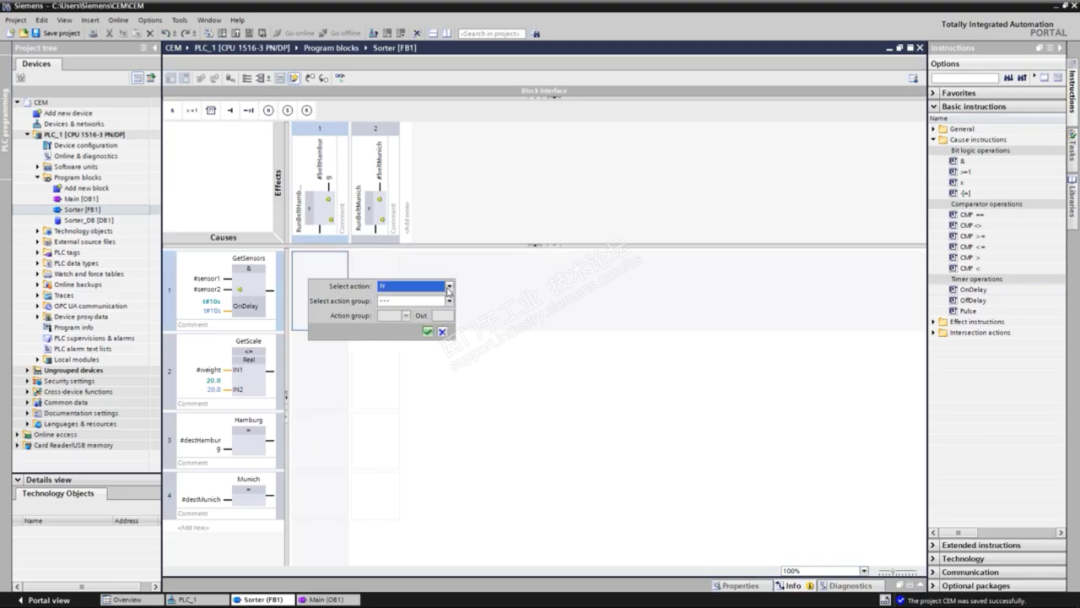
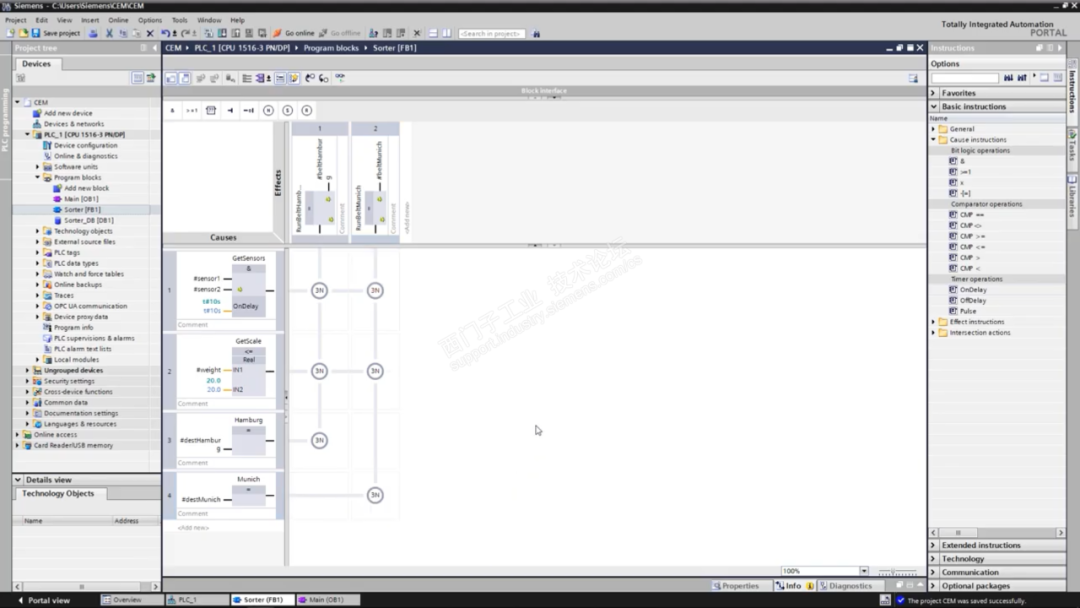
選擇幾個cause,會影響effect
123cause影響effect1 ;124cause影響effect2。
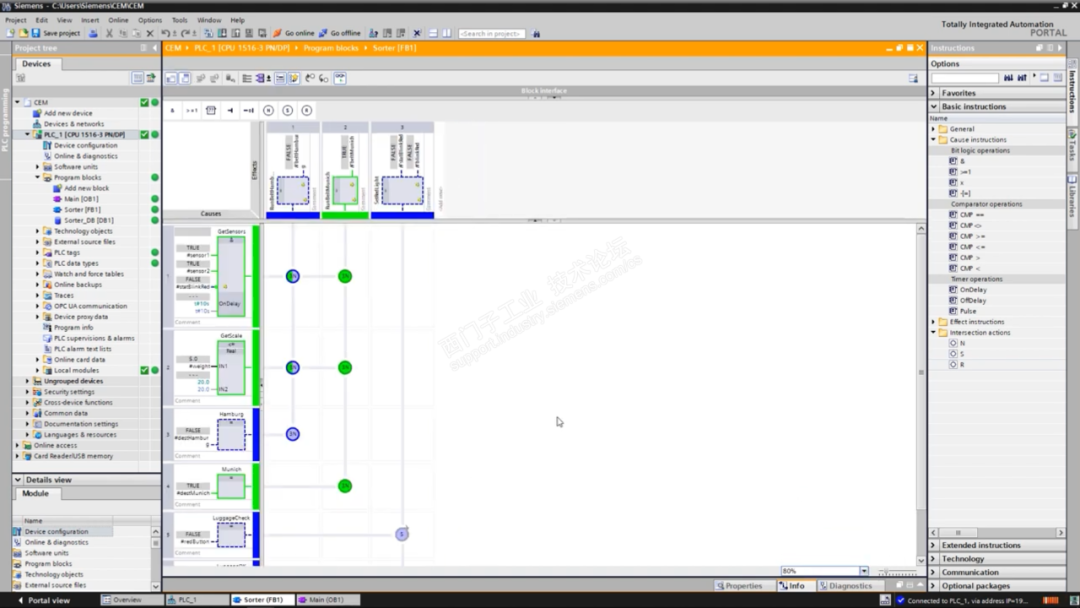
實際監控中效果,124cause滿足條件,影響effect2輸出。
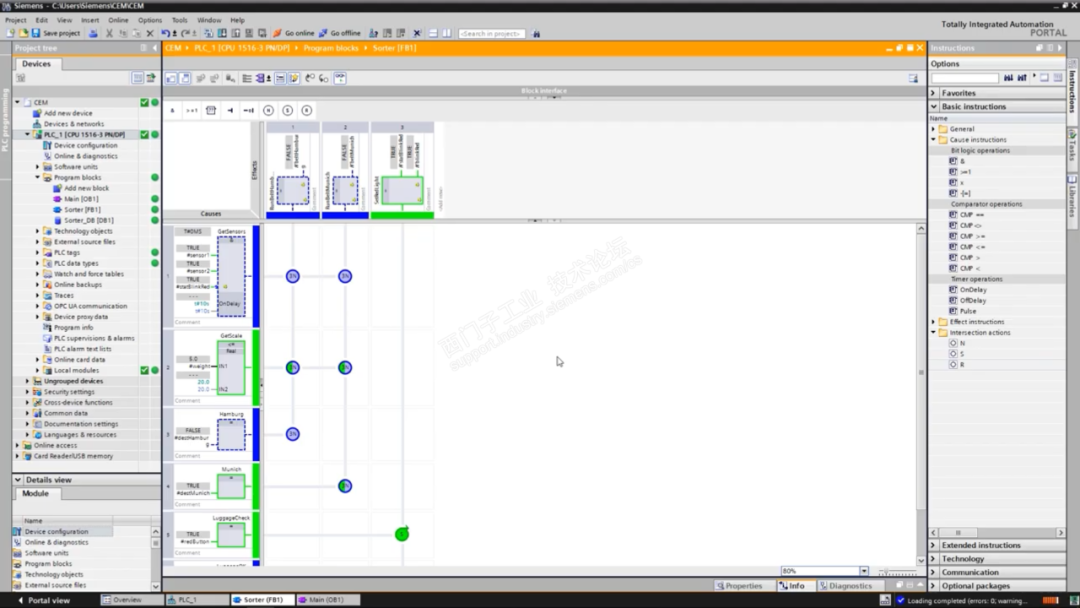
動作為S R的效果
自動化系統技術高級專家崔堅點評:
對于離散控制,通常使用STL、LAD、SCL和Graph;對于過程控制例如西門子的PCS7,使用CFC和CEM,這不是編程方式而是設計方式,如果還有順序控制,可以使用SFC(相當于Graph)。
CFC和CEM連接的都是現成的函數和函數塊,這種連接方式都是面向控制對象的,所以控制對象必須預先進行標準化的編程,也就是說在庫中必須有不同對象的函數而且還要豐富,不知道在V17中是否會提供大量的控制對象的函數。
原先我們估計TIA博途不會集成CFC,考慮到TIA博途是用于離散行業的,但是又要集成到V17中,可能是基于程序結構化和標準化的考慮,使用CFC連接不同的控制對象管腳還是比較方便的。
如果提供CFC的庫,庫中是否包含用于運動控制的函數,例如替代位置模塊FM458的函數庫?
(2)Robot Library是通過和機器人之間建立統一的接口、共享的工程環境,和統一的操作方式實現控制的,目前只對一些主流的機器人制造商適用,如KUKA、ABB。
S7-1500增加了一款邊緣計算模塊TM MFP,這款模塊使S7-1500具有邊緣計算能力,模塊支持多種應用程序,如Proneta、Simatic Flow Creator,也可以通過高級語言自己開發應用程序用于邊緣計算。該模塊也可以通過以太網連接到S7-1200或各種伺服上,用于處理獲得的PLC和伺服的數據。
審核編輯 :李倩
-
定位器
+關注
關注
2文章
170瀏覽量
17582 -
S7-1500
+關注
關注
3文章
300瀏覽量
6492
原文標題:輕松搞定的定位控制,這一招真的太好用了!
文章出處:【微信號:gkongbbs,微信公眾號:工控論壇】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
智能閥門定位器與傳統閥門定位器的比較
閥門定位器選型經驗:閥門定位器用得好不如選得好
地下電纜定位器如何工作?
數字智能閥門定位器及其應用
什么是統一資源定位器
基于SVP3000 Alphaplus的定位器介紹
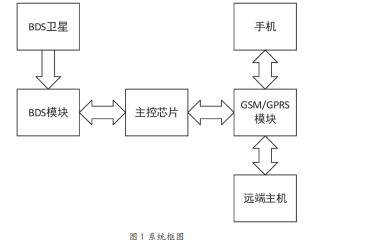
如何使用BDS和GPRS進行智能汽車定位器的設計
寵物定位器防水嗎,寵物定位器IPX7級防水設計
900g大負載型壓電物鏡定位器!






 工商網監
工商網監
評論