 探究精確的多相機同步技術
探究精確的多相機同步技術
IRIG時間碼發生器的作用是為所有同步網卡(Sync NIC)提供穩定且相等的時間源,而Sync NIC反過來會對來自所有相機的幀加時間戳,然后將這些幀連同時間戳一起傳遞給應用層,具有Myricom MVA解決方案的低CPU占用率/低延遲的特點。
使用這種方法可以獲得與基于IEEE1588解決方案相當的精度。這種操作的優勢是不使用在高精度系統中常用的網絡交換機。通常,在這些案例當中,一臺相機將通過交換機為其他相機提供時間信息,而PC則只用進行幀處理。然而對于超高速10G應用程序,交換機可能非常昂貴。此外,還可能會為具有強可靠性要求的系統增加另一個新的故障點。
與外部觸發相比,這種解決方案的其他優勢是消除了在傳遞觸發信息的相機之間運行的線纜。此外,IRIG B往往可以在許多系統中使用,因此它只是將IRIG B信號補丁到同步網卡中,而增加的成本很少。
該解決方案可以使用SFP+布線選項,包括距離大于10m的光纖連接和距離小于10m或更短的直接連接。接下來將詳細介紹實現同步的過程:
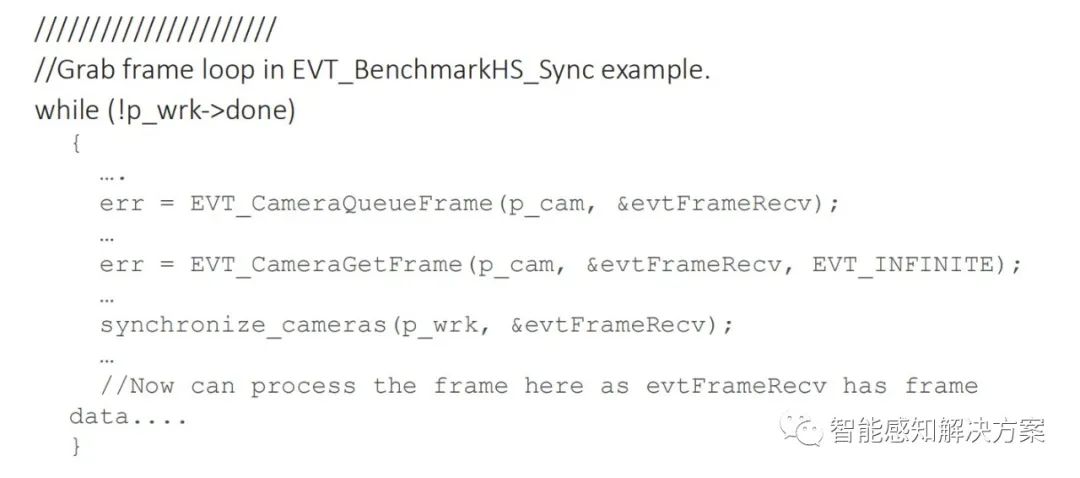
上面的示例代碼(來自 EVT_BenchmarkHS_Sync eSDK 示例)為清晰可見進行了簡化,在一個軟件線程中運行,為每個相機啟動一個線程。
代碼以標準方式排列并獲取幀,然而,當獲取到這些幀時,幀結構的相關時間戳字段在synchronize_cameras()中使用,以確定每個幀的時間偏移,該時間偏移基于Myricom sync NICs接收到的幀的時間戳。通過計算這些時間偏移,適當的時間偏移校正被寫回相機以校正任何時間偏移,并且所述偏移在相機發送的下一幀上立即生效。
該示例啟動相機采集,一旦相機接收到第一幀,就會計算和校正主要偏移。從那時起,以預定間隔循環次偏移計算和校正。 此外,代碼可以配置為以不同的時間間隔執行此同步,以對同步精度進行編程控制。
藍色塊表示相機C1-C4的曝光。橙色塊表示給定相機的曝光與最慢的相機(在本例中為相機C4)之間的偏移時間。同步過程是確定橙色塊的偏移量,并將適用的校正偏移量寫入“早期”相機,以通過上面綠色顯示的這些校正偏移量延遲下一幀的開始。
應用偏移量后,所有相機現在都同步并同時開始曝光。此插圖是較大規模的偏移校正,在首次啟動相機流式傳輸時可能會出現。
當涉及多臺PC時,可以利用計算機之間較低帶寬的鏈路(例如標準網絡)在現在運行在不同PC上的主線程和從線程之間傳遞時間戳和計算出的偏移校正信息。
結合各種布線選項,該解決方案是最靈活、成本低且性能優化的超高速同步相機應用解決方案。
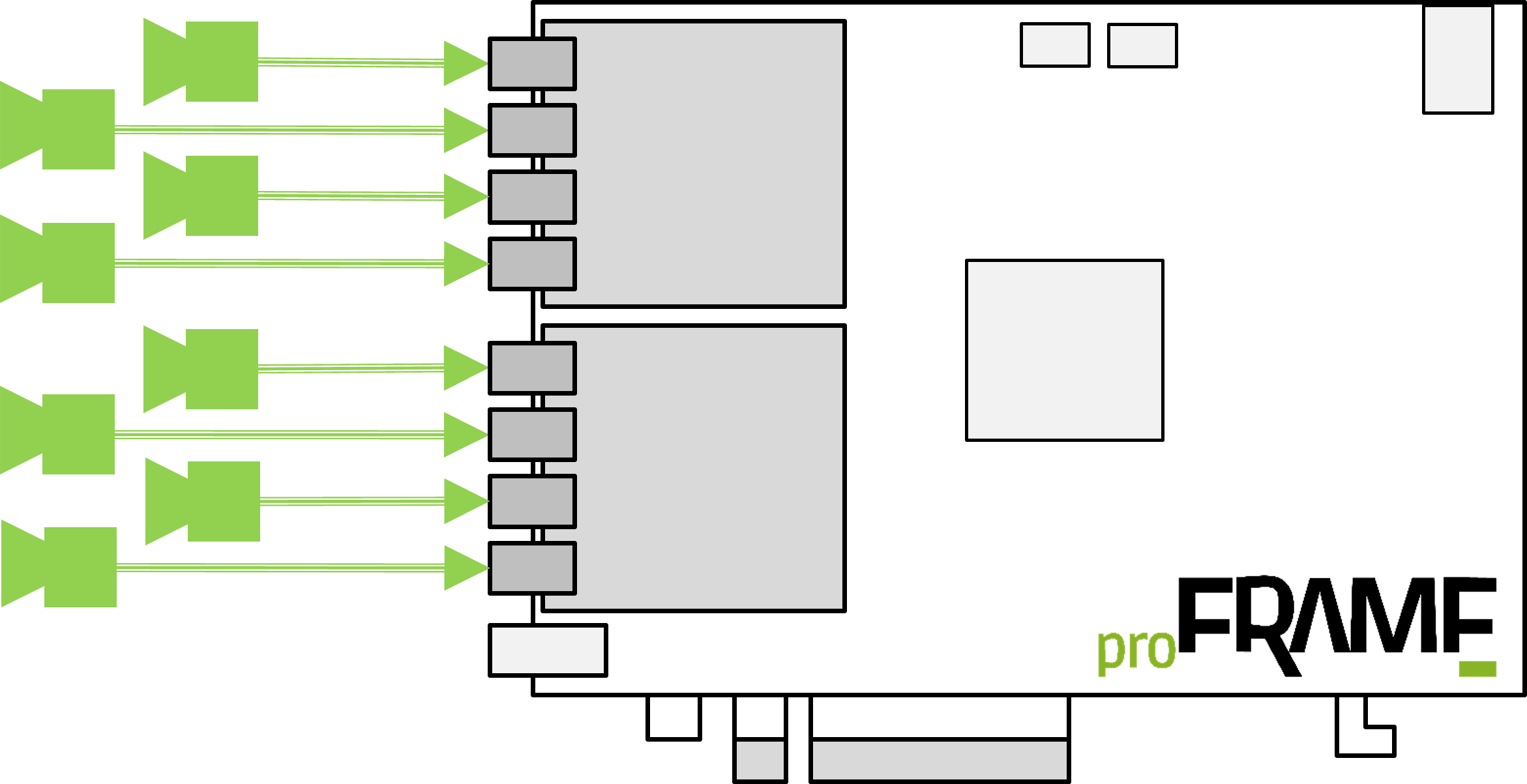
通過SFP 布線(光纖、直接連接)連接到Myricom Sync NIC的虹科EVT相機
雙端口同步NIC,在一臺或多臺 PC 中具有 SMB IRIGB00X 輸入
IRIGB00X時間碼發生器使用GPS或基于內部的時間碼
編輯:jq
-
相機
+關注
關注
4文章
1364瀏覽量
53801
原文標題:虹科智能感知 | 虹科為您介紹精確的多相機同步技術
文章出處:【微信號:OPPOOIA,微信公眾號:OPPOstory】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
北斗衛星同步時鐘授時天線:實現精確時間同步的關鍵
ptp時間同步技術的優勢
用于任意排列多相機的通用視覺里程計系統

高速點焊工藝中先進控制電源的關鍵技術探究與應用
友思特分享 車載同步技術創新:多相機系統如何實現精準數據采集與實時處理?
【直播預告】AI系統的多相電源原理與應用

友思特方案 多相機的完美閉環:proFRAME車載全景環視相機數采方案

具有多相功能的 LM5122-Q1 寬輸入同步升壓控制器數據表

具有多相功能的LM5122ZA 寬輸入同步升壓控制器數據表
高效節能的DC電源模塊技術探究
康謀技術 |智能駕駛數據融合的時間同步關鍵技術

北斗衛星時鐘同步裝置:實現全球時間精確同步

康謀技術 | 智能駕駛數據融合的時間同步關鍵技術





 工商網監
工商網監
評論