

2021年6月17日9時22分,搭載神舟十二號載人飛船的運載火箭,在酒泉衛星發射中心點火發射。此后,神舟十二號載人飛船與火箭成功分離,進入預定軌道,順利將聶海勝、劉伯明、湯洪波3名航天員送入太空,發射取得圓滿成功。
在載人飛船運行的過程中,需要嚴格觀測及控制其運行軌跡。談到載人航天,不得不提及人類歷史上第一次登月,阿波羅登月,阿波羅號成功的背后是運用了卡爾曼濾波。
那什么是濾波?濾波是指從含有干擾的接收信號中提取有用信號的一種技術,是一種增強有用信號的數字信號處理過程。在數據通信中,無用信號表現為特定波段頻率和雜波,通常是一個隨機過程。卡爾曼濾波是最優濾波中的一種常用算法,是以實現信號或狀態的最優估值與相應的真實值的誤差的方差最小。
最早實現卡爾曼濾波器的是斯坦利·施密特。魯道夫·卡爾曼在訪問NASA埃姆斯研究中心時,將斯密特的方法應用于阿波羅計劃的軌道預測,并于1960年,提出離散系統卡爾曼濾波,后又將該種方法推廣到連續時間系統中。
正是由于卡爾曼濾波從時域分析處理數據,不僅可以處理平穩隨機過程,也可以處理非平穩隨機過程,所以被廣泛應用于各種領域,例如慣性導航,定位系統,經濟投資等。
卡爾曼濾波分類
常見的卡爾曼濾波主要分為離散型卡爾曼濾波和連續型卡爾曼濾波。
A.離散型卡爾曼濾波
遞推算法的使用是卡爾曼濾波的一大優點,因此離散型卡爾曼濾波在工程上得到了廣泛的運用。在一個濾波周期內,根據卡爾曼濾波對使用系統信息和量測信息的先后次序,可以將卡爾曼濾波劃分為時間更新過程和量測更新過程,主要分為以下幾個部分。
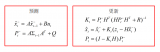
1.一步預測:根據k-1時刻的狀態估計預測k時刻的狀態,通過k-1個時刻的量測量對k時刻狀態量進行線性最小方差估計。

2.狀態估計方程:通過利用殘差(新息),對狀態量進行修正估計

其中, 是對殘差的加權陣,被稱為濾波增益陣。
是對殘差的加權陣,被稱為濾波增益陣。
3.濾波增益陣和估計均方誤差陣的推導:最佳濾波增益陣使得估計的均方誤差達到最小。

其中, 是最佳增益陣,
是最佳增益陣, 是最小均方誤差陣。
是最小均方誤差陣。
4.一步預測均方誤差陣推導

離散型卡爾曼濾波基本方程具有如下優點:
(1)遞推算法的使用,使得數據的存儲量減少,通過濾波步數的增加,提取出的信息量在增大。
(2)只須知道驅動噪聲的統計特性,使得卡爾曼濾波能對非平穩的被估計量做估計。
B.連續型卡爾曼濾波
連續型卡爾曼濾波可以在離散型卡爾曼濾波的基礎上進行推導,通過將連續系統離散化,應用離散型卡爾曼濾波基本方程和導數運算推導出連續型濾波方程。
設連續系統的系統方程和量測方程的一般形式為

連續型卡爾曼濾波的預測和更新的一般方程為:

非線性系統卡爾曼濾波算法
A.擴展卡爾曼濾波
上述卡爾曼濾波問題都是假設物理系統的數學模型是線性的,但是線性模型只是理想化,實際工程中很多的模型都是非線性的。同時,在非線性系統中,如果系統噪聲和觀測噪聲都是任意分布,那么系統的處理難度會更大。因此,一般會對噪聲的統計特性給出符合實際而又便于數學處理的設定。非線性系統的數學模型如下
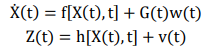
其中,w(t)和v(t)是彼此不相關的零均值白噪聲序列,它們與初始狀態X(0)也不相關。
針對擴展卡爾濾波,利用非線性函數的局部線性特性,將非線性模型局部線性化,通常是將非線性函數f圍繞濾波值做一階Taylor展開。

此外,將非線性函數h圍繞濾波值做一階Taylor展開。

線性化后,對其運用線性卡爾曼濾波基本方程,便可獲得擴展卡爾曼濾波遞推方程。
B.無跡卡爾曼濾波
擴展卡爾曼濾波是對非線性的系統方程或者觀測方程進行泰勒展開并保留一階近似項,引入了線性化誤差。無跡卡爾曼濾波摒棄了對非線性函數進行線性化的傳統做法,采用卡爾曼線性濾波框架,對于一步預測方程,使用無跡變換來處理均值和協方差的非線性傳遞問題。
什么是無跡變換呢?在原狀態分布中按照某一規則選取一些采樣點,他們的均值和協方差等于原狀態分布的均值和協方差;并將他們帶入非線性函數,獲取相應函數值的點集。對這些點求取變換后的均值和協方差。
針對無跡卡爾曼濾波,其非線性系統的描述
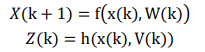
根據上述無跡變換,對非線性系統進行變換處理。不同于在估計點處做Taylor級數展開,再進行n階近似,而是在估計點附件進行無跡變換,使得Sigma點集的均值和協方差與原統計特性匹配,再對這些Sigma點集進行非線性映射,獲得狀態概率密度函數,實現一種統計近似。
C.交互式多模型卡爾曼濾波
針對前面幾種卡爾曼濾波,不必知道目標的運動模型就能夠實時修正目標的狀態參量,具有較好的適應性,但是如果目標實施突然的運動變化時,基本的卡爾曼濾波就無法獲取好的結果了。交互式多模型卡爾曼濾波是一種軟切換算法,使用兩個或者更多的模型描述工作過程中的狀態,利于減小單模型估計誤差較大的影響。
交互式多模型卡爾曼濾波的思想是在每一個時刻,假設某個模型在當下時刻有效,然后混合前一時刻所有濾波器的狀態估計值,獲取與這個特定模型匹配的濾波器的初始條件,然后對每個模型并行實施濾波,然后,以模型匹配似然函數為基礎更新模型概率,并組合所有濾波器修正后的狀態估計值以得到狀態估計。
在使用該算法時,對于濾波器的目標運動模型的選擇,需要從以下幾個方面進行考慮。
1.濾波器個數的選擇,包括較為精確的模型和較為粗糙的模型。
2.馬爾科夫鏈狀態轉移概率的選取對濾波器的性能有較大影響,會直接影響模型誤差和模型概率估計的準確性。
3.該算法具有模塊化的特性,當使用的時候,無法預料目標的運動規律時,應該選擇一般的魯棒性較強的模型。
作者:凌霄
浙江大學機械電子專業博士,從事智能傳感與人機交互,智能機器人控制等領域的研究
編輯:jq
-
卡爾曼濾波
+關注
關注
3文章
166瀏覽量
24888
原文標題:漫談卡爾曼濾波
文章出處:【微信號:cetc49,微信公眾號:傳感技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
《機電工程技術》網絡首發論文
卡爾曼濾波在圖像處理中的應用實例 如何調優卡爾曼濾波參數
【「從算法到電路—數字芯片算法的電路實現」閱讀體驗】+閱讀濾波器章節部分筆記

卡爾曼濾波器的特性及仿真

從算法角度看 SLAM(第 2 部分)

拉曼光譜的原理及其應用
拉曼光譜儀原理及應用
卡爾曼濾波是什么 卡爾曼濾波與目標追蹤技術分析






 工商網監
工商網監

評論