 卡爾曼濾波在信號處理中的應用分析
卡爾曼濾波在信號處理中的應用分析
卡爾曼濾波在信號處理中的應用十分廣泛,其強大的濾波和預測能力使其成為信號處理領域的一種重要工具。以下是對卡爾曼濾波在信號處理中應用的分析:
一、卡爾曼濾波的基本原理
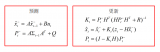
卡爾曼濾波是一種遞歸估計算法,用于估計動態系統的狀態變量。它基于兩個關鍵步驟:預測和更新。在預測階段,通過已知的系統狀態轉移方程,預測下一時刻的狀態;在更新階段,利用觀測數據對預測結果進行修正,得到最優的狀態估計。
二、卡爾曼濾波在信號處理中的應用
- 去噪和平滑
- 在信號處理中,卡爾曼濾波能夠有效地濾除高頻噪聲,保留有用的低頻成分,提供平滑的輸出。這對于提高信號的質量和可讀性具有重要意義。
- 實時狀態估計
- 卡爾曼濾波具有遞歸性,能夠實時處理輸入數據,適合實時控制和系統狀態監控。在信號處理中,這意味著可以實時地跟蹤和估計信號的狀態,為后續的決策和控制提供依據。
- 提高測量精度
三、卡爾曼濾波在信號處理中的具體實例
- 音頻信號處理
- 在音頻信號處理中,卡爾曼濾波可以用于語音增強、噪聲抑制等方面。通過濾除背景噪聲,提高語音的清晰度和可懂度。此外,卡爾曼濾波還可以用于音頻信號的預測編碼,提高信號壓縮的效率和質量。
- 圖像信號處理
- 在圖像信號處理中,卡爾曼濾波可以用于圖像去噪、圖像恢復等方面。通過濾除圖像中的噪聲和干擾,提高圖像的清晰度和質量。此外,卡爾曼濾波還可以用于圖像序列的跟蹤和預測,為圖像處理和計算機視覺提供有力的支持。
- 雷達信號處理
- 在雷達信號處理中,卡爾曼濾波可以用于目標跟蹤和狀態估計。通過處理雷達回波數據,實時地跟蹤目標的位置、速度和加速度等狀態信息。這對于雷達系統的目標檢測和跟蹤具有重要意義。
四、卡爾曼濾波在信號處理中的調優策略
- 合理設置噪聲協方差矩陣
- 在卡爾曼濾波中,過程噪聲協方差矩陣Q和測量噪聲協方差矩陣R的設置對濾波效果有很大影響。需要根據實際系統的特性和測量設備的精度來合理設置這些參數。
- 優化狀態轉移方程和觀測方程
- 狀態轉移方程和觀測方程是卡爾曼濾波的核心部分。需要根據實際系統的動態特性和觀測數據的特性來優化這些方程,以提高濾波的準確性和穩定性。
- 采用擴展卡爾曼濾波或無跡卡爾曼濾波
- 對于非線性系統,可以采用擴展卡爾曼濾波(EKF)或無跡卡爾曼濾波(UKF)等變種方法進行處理。這些方法通過對非線性系統進行線性化或采用無跡變換等方法來處理非線性問題,從而提高濾波的準確性和穩定性。
綜上所述,卡爾曼濾波在信號處理中具有廣泛的應用前景和重要的應用價值。通過合理設置參數、優化方程以及采用變種方法等措施,可以進一步提高卡爾曼濾波在信號處理中的性能和效果。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2552文章
51228瀏覽量
754691 -
數據
+關注
關注
8文章
7081瀏覽量
89196 -
信號處理
+關注
關注
48文章
1032瀏覽量
103318 -
卡爾曼濾波
+關注
關注
3文章
166瀏覽量
24660
發布評論請先 登錄
相關推薦
DFT在圖像處理中的作用 DFT在音頻信號處理中的應用
處理中的幾個主要作用: 頻域濾波 :DFT允許我們分析圖像的頻率成分,從而可以設計濾波器來增強或抑制特定頻率的
卡爾曼濾波在機器人導航中的應用
,預測下一時刻的狀態和協方差。 更新步驟 :利用新的觀測數據,調整預測狀態,以減少誤差。 卡爾曼濾波的關鍵優勢在于其遞歸性,這意味著它可以實時處理數據流,而不需要存儲整個觀測序列。 機
PWM信號的濾波和處理方法
PWM(脈沖寬度調制)信號的濾波和處理是電子設計中常見的任務,旨在將PWM信號轉換為更平滑的直流信號或去除不需要的噪聲和波動。以下是對PWM
卡爾曼濾波器的特性及仿真
我們前一篇關于人物識別跟蹤的文章《視頻連續目標跟蹤實現的兩種方法和示例(更新)》里講到,視頻圖像中物體的識別和跟蹤用到了卡爾曼濾波器(KF)。這里對這個話題我們稍微對這個

卡爾曼濾波是什么 卡爾曼濾波與目標追蹤技術分析
卡爾曼濾波以及其擴展算法能夠應用于目標狀態估計,如果這個目標是行人,那么就是行人狀態估計(或者說行人追蹤),如果這個目標是自身,那么就是車輛自身的追蹤(結合一些地圖的先驗,GPS等數據的話就是自身的定位)。

卡爾曼濾波算法c語言實現方法
卡爾曼濾波(Kalman Filter)是一種用于估計狀態的算法,最初由R.E. Kalman在1960年提出。它是一種線性高斯濾波器,常用






 工商網監
工商網監
評論