 為什么人們偏愛吸塵器而不是掃地機?
為什么人們偏愛吸塵器而不是掃地機?
現代人工作繁忙,加上生活品質提高,吸塵器、掃地機這類幫助人們減輕勞動力的清潔設備自然越來越受歡迎。
特別是吸塵器更是經歷了幾十年的發展,經久不衰,從最早的有線+大塵桶的形式變成了如今的無線+手持形式,深受眾多家庭喜愛。
后來隨著消費群體越發年輕化,科技也更發達,智能化程度和自動化程度的掃地機器人逐漸走進了人們的生活,并取得了高速發展。
據數據顯示,2016年~2018年,我國掃地機器人零售量復合增長率達49%,其增速遠超其他家電品類,2018年零售額規模78億元,零售量規模605萬臺。
我們常說的吸塵器一般是手持式吸塵器,而掃地機器人嚴格來說也歸為吸塵器品類,稱為機器人型吸塵器。
根據有關數據顯示,我國吸塵器線上和線下銷售渠道均以手持式和機器人型吸塵器產品為主,其中線上渠道機器人比重為45.6%,高于手持式(30.7%);
線下渠道手持式比重為58.2%,遠高于機器人(20.8%)。由此可見,掃地機器人的受眾還是集中于年輕人渠道和線上渠道,手持式吸塵器仍然是清潔設備中的絕對主流。
掃地機器人最大的優勢在于只要手機遠程操控,即可自行規劃路徑進行全屋清潔。雖然有噪音,但是完全可以在家中無人的時候工作,不會影響休息。
沒電后還能自行返回充電樁充電,而后繼續工作。即便是床下、沙發下的位置,只要空隙高度大致在12cm以上也能進行清理。
智能又省力,這是掃地機器人最吸引人的地方,所以年輕人尤為中意它。
不過盡管掃地機器人日趨成熟,但對家居環境要求仍然較高,適合地面面積較大無遮擋物的家居環境。
如果戶型較小,地面堆放很多雜物,以及地面有電線,則會對掃地機器人造成很大阻礙,此外,掃地機器人只是單一的地面清潔工具,只能清潔地面以及短毛地毯。
反觀吸塵器,適應性極強,配合不同的刷頭,不僅能處理地板、瓷磚、地毯,還能清潔沙發、床、窗戶門縫等等,功能更強大,因此成為更多家庭的選擇。
這就能解釋為什么已經發展得非常智能的掃地機還是沒能超過吸塵器,成為清潔類小家電的“一哥”。
當然,從產品特性來講,這兩種設備并不矛盾,不存在很強的競爭關系,而是各自能滿足不同人群的需求。
比如沒時間打掃或者不愛打掃的年輕人,當然首選掃地機器人,再好的吸塵器拿到手上也很難用。而對于有較多時間的全職媽媽或者父母長輩,功能更全面、適應性更廣的手持吸塵器則是最佳選擇。
當你明確自己的需求時,有哪些選購技巧呢?
吸塵器選購知識
吸塵器吸力怎么看?
一般來說,廠家會用兩種方法標注吸力有多大,有一種是Pa,另一種是AW。
Pa指壓強,也就是吸塵器刷頭在相對密封的情況下產生的靜壓值,能在一定程度上代表吸塵器的吸力大小。
反映到實際生活中,吸地毯、被子、枕頭等比較軟的材質時,吸塵器刷頭會被這些材料緊緊貼住,形成一個相對真空的狀態,這時候的吸力用Pa來衡量是可以的。
但問題在于我們使用吸塵器的場景肯定不只這些地方,很多時候還要面對地磚、地板等硬質地面,這時候刷頭和地面之間有一定間隙,產生的吸力就不能用多少Pa來衡量了,所以便引入了AW(氣動功率產生的吸力)。
AW(吸力)=動壓(空氣流量)x靜壓(真空吸力),既包含了吸塵器在硬質地面上運動時產生的空氣流量,又包含了在軟質地面上運動時產生的靜壓值,更能反映吸塵器的綜合吸力大小。
至于為什么有的廠家喜歡用Pa這個指標,我認為更多地是因為真空吸力數字更大,看起來顯得更厲害,而且Pa很多人都知道代表壓強,更容易理解。
無刷電機已成為好吸塵器的標配
幾百元的低端手持吸塵器大多采用有刷電機,轉速普遍在3萬轉左右,吸力一般也不超過30AW。
想要獲得更大的吸力,首先就必須大幅度提高電機的轉速,傳統有刷電機由于存在碳刷,提高轉速不僅會讓電機溫度升高,還會產生磨損,降低使用壽命,無刷電機則不存在這樣的問題。
2013年,戴森推出了一款V6無刷電機,把轉速直接提升到了11萬轉,讓產品性能發生了質的變化,戴森吹風機、吸塵器等產品的成功很大程度上要歸功于這種電機的應用。
隨著技術進一步發展,目前很多品牌的電機已經能夠做到10萬轉以上,吸力可輕松突破100AW,提升巨大。
因此,在選擇吸塵器時,建議首先選擇搭載10萬轉無刷電機,吸力達到100AW左右或以上的產品,滿足這個要求產品不光有戴森,很多國產品牌的千元檔產品也可以做到。
氣旋分離結構很關鍵
吸塵器在使用過程中不斷吸入垃圾,隨著垃圾增多,濾網逐漸堵塞,風阻增大,吸塵器的吸力也會隨之減弱。如果這個問題不能解決,那么吸塵器電機再強、吸力再大也只是“5秒真男人”,沒掃多久吸力就會迅速衰減,影響使用效果。
氣旋分離技術本質上是利用了離心作用,風帶著灰塵在塵桶中高速旋轉,分離不同質量的微小顆粒物,從而避免堵塞濾網。
在其他行業,類似的離心分離技術應用也十分廣泛,比如污水處理,原理也是讓污水在泵中高速旋轉,水中的雜質由于質量不同會分層,從而分離出干凈的水。
我們在中學學過向心力公式,其中m代表物體質量,r代表旋轉半徑,代表角速度。
在風速一定的條件下,半徑越小,角速度會呈指數級增大,也就能產生更強的離心作用,分離出質量更小的灰塵。
一般的吸塵器只有一個大的分離桶,半徑比較大,分離瓜子殼這種質量大的垃圾完全沒問題,但遇到微小的灰塵就束手無策了。
所以綜合來看,電機轉速越快,吸力越強;多錐氣旋分離做得越好,吸力衰減就越小。
而這兩方面正好是戴森的強項,這也就能解釋為什么戴森吸塵器和其他吸塵器看著參數差不多,但就是更好用一點。
掃地機選購知識
選掃地機就是選導航技術
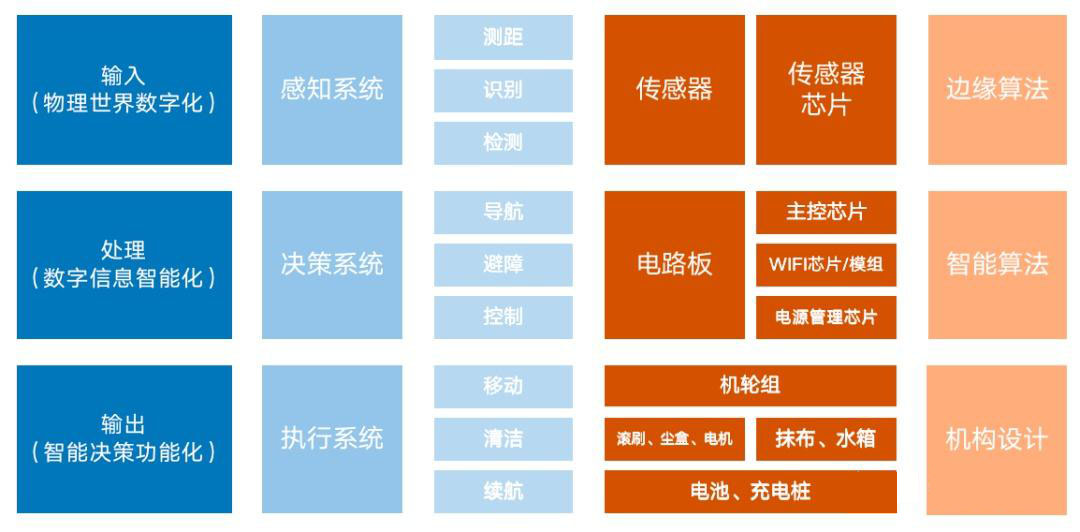
掃地機作為一款完全自主化的掃地工具,它應該隨時知道自己在哪,怎么制定清掃路線,哪里掃了哪里沒掃。
掃地機器人所使用的定位導航技術相當于它的眼睛和大腦,一方面可以幫助掃地機器人定位,讓掃地機知道自己在哪里,另一方面幫助掃地機器人進行清掃路線規劃,保證清掃覆蓋到每個區域,避免遺漏。
好的定位導航技術可以讓掃地機器人按照規劃式路線清掃,不好的技術只會讓掃地機器人胡亂清掃一遍,造成很多遺漏,而且浪費時間。
激光導航
激光導航是怎么實現定位的呢?首先雷達利用激光掃描四周的環境,激光在遇到物體后會反射回來。
而物體表面不同的點到雷達的距離是不一樣的,計算激光發射到反射回來的時間就可以得到掃地機到不同物體的距離,同時也就描繪出了整個環境的輪廓,達到了定位和構建地圖的目的。
激光導航優勢在于測量比較準確,在強光直射以外的環境中運行穩定,路徑規劃和導航直觀。
激光定位理論研究也相對成熟,所以是目前被采用最多的技術。缺點是激光雷達的探測半徑一般只有10米左右,一般家庭都夠用,但對于超大空間的場所,激光導航的效果就會大打折扣。
視覺導航
采用視覺導航的掃地機擁有真正的“眼睛”——攝像頭,通過攝像頭拍攝周圍的環境和物體,再輔以目前很流行的圖像識別技術,從環境中直接獲取物體的位置距離信息來實現定位功能。
優勢是由于可以采集環境的圖像,所以說不受探測距離的限制,任何大小的空間都可以使用,并且隨著AI圖像識別技術的發展,會開發出更多有趣的功能,未來應用前景很廣闊。
缺點在于攝像頭拍攝受環境光線影響大,低亮度情況效果差。而且圖像識別對廠家的開發能力和掃地機運算能力要求很高,所以目前使用這種技術實際效果參差不齊。
慣性導航
慣性導航是利用內部的陀螺儀、加速度計等慣性傳感器進行路徑規劃,配合紅外、超聲波等距離傳感器,就可以實現很粗糙的導航效果。
嚴格意義上來說,這種方式并沒有什么導航效果,使用慣性導航的掃地機路徑都為隨機式,可以簡單理解為橫沖直撞,走到哪算哪。唯一的優勢就是研發難度低、成本低。
三種技術總結如下表:
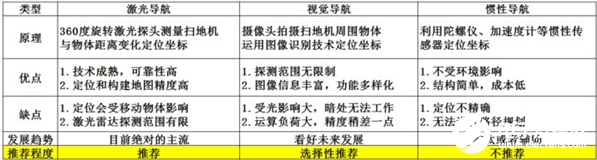
未來激光導航和視覺導航有相互融合的趨勢,目前市面上已經有同時采用激光導航和視覺導航的掃地機器人,也可以選擇。
寫在最后
吸塵器和掃地機以后的發展方向,我個人認為應該是不太一樣的,吸塵器繼續優化吸力、適應性,把清潔力推向極致。
而掃地機器人會跟隨AI人工智能的大潮,迎來新一波升級和應用場景拓展,也許將來你買到的掃地機器人已經不簡簡單單是一臺清潔工具,而是一臺多功能智能管家。
責編AJX
-
吸塵器
+關注
關注
2文章
333瀏覽量
22261 -
智能家電
+關注
關注
17文章
925瀏覽量
64320 -
掃地機
+關注
關注
0文章
61瀏覽量
5225
發布評論請先 登錄
相關推薦
智能掃地機器人的工作原理和構成
淺談掃地機器人用到的那些電子元器件!
云鯨J5掃地機,養寵家庭不可錯過的一款全能掃地機
霍爾開關在掃地機器人中的應用

掃地機器人避障技術的發展史
2029年全球吸塵器市場規模預計將達906.12億元

吸塵器優選指南:灰塵感應能力對深度清潔很重要!

供應 英集芯IP2348,適用于掃地機器人解決方案的鋰電池同步降壓充電芯片
其利天下技術·搭載無刷電機的掃地機器人的前景如何?
鴻蒙南向開發實戰:【智能掃地機】
掃地機器人CCC認證申請流程與其他產品的區別是什么?

視覺、激光、結構光?掃地機器人導航避障技術盤點
WB212F/WB202B WiFi+藍牙BLE模組掃地機器人方案





 工商網監
工商網監
評論